Object-Based Ensemble Learning for Pan-European Riverscape Units Mapping Based on Copernicus VHR and EU-DEM Data Fusion


Abstract
:
1. Introduction
2. Study Area and Data Description
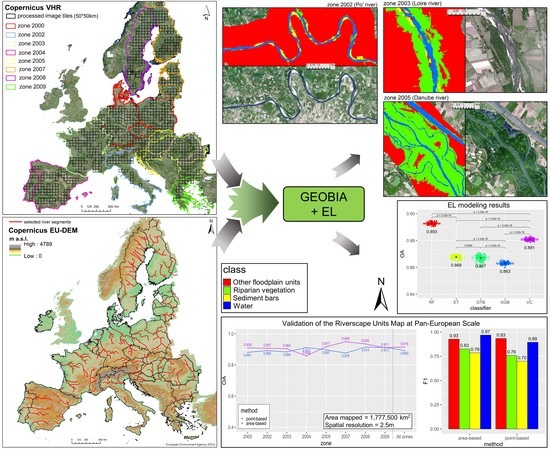
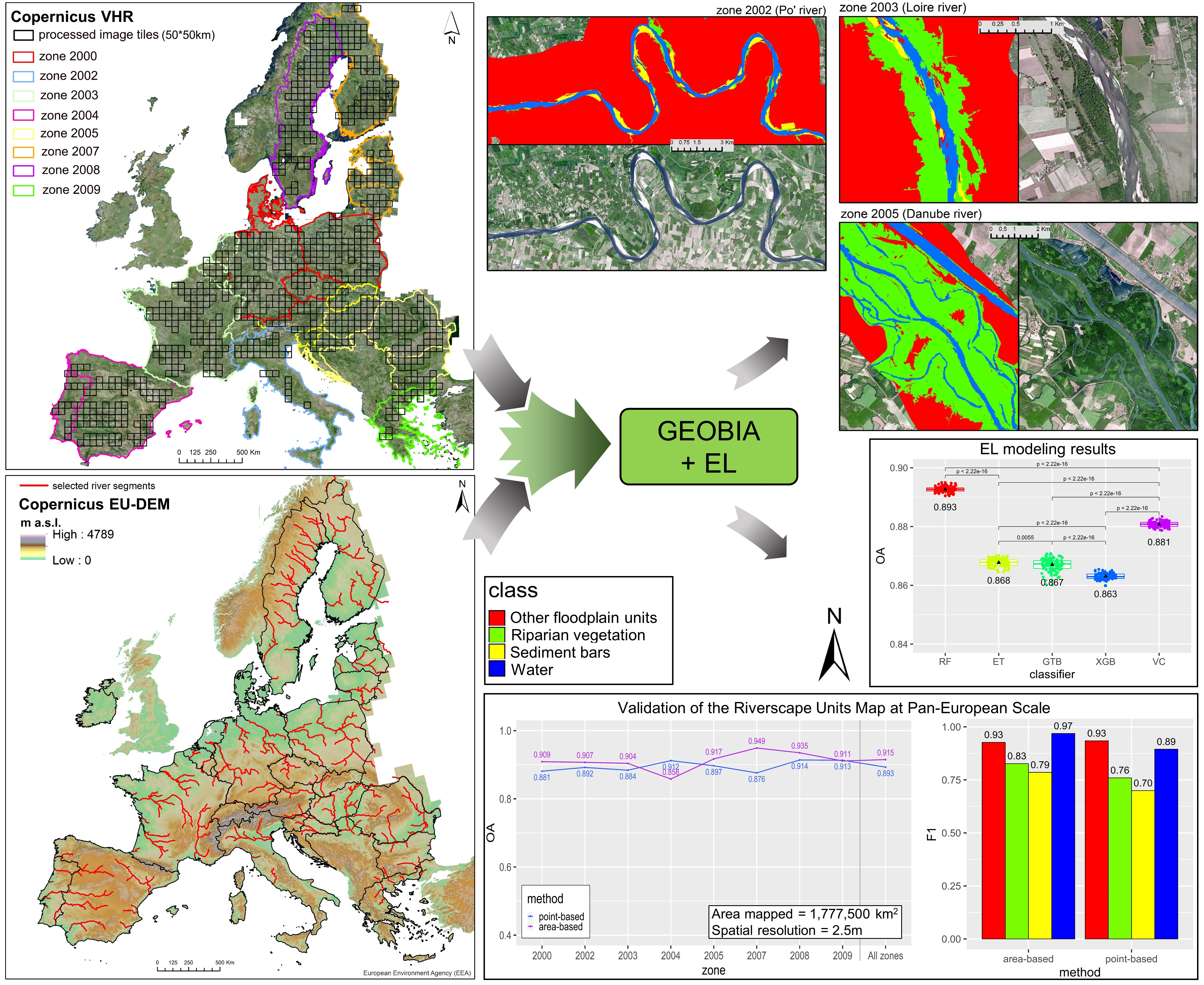
2.1. Remote Sensing Data and Areas of Interest
3. Methodology
3.1. Data Pre-Processing and Organization
- RED layer, from Copernicus VHR at 2.5 m resolution
- GREEN layer, from Copernicus VHR at 2.5 m resolution
- BLUE layer, from Copernicus VHR at 2.5 m resolution
- DEM layer, from Copernicus EU-DEM at 25 m resolution
- SLOPE layer, computed at 25 m resolution
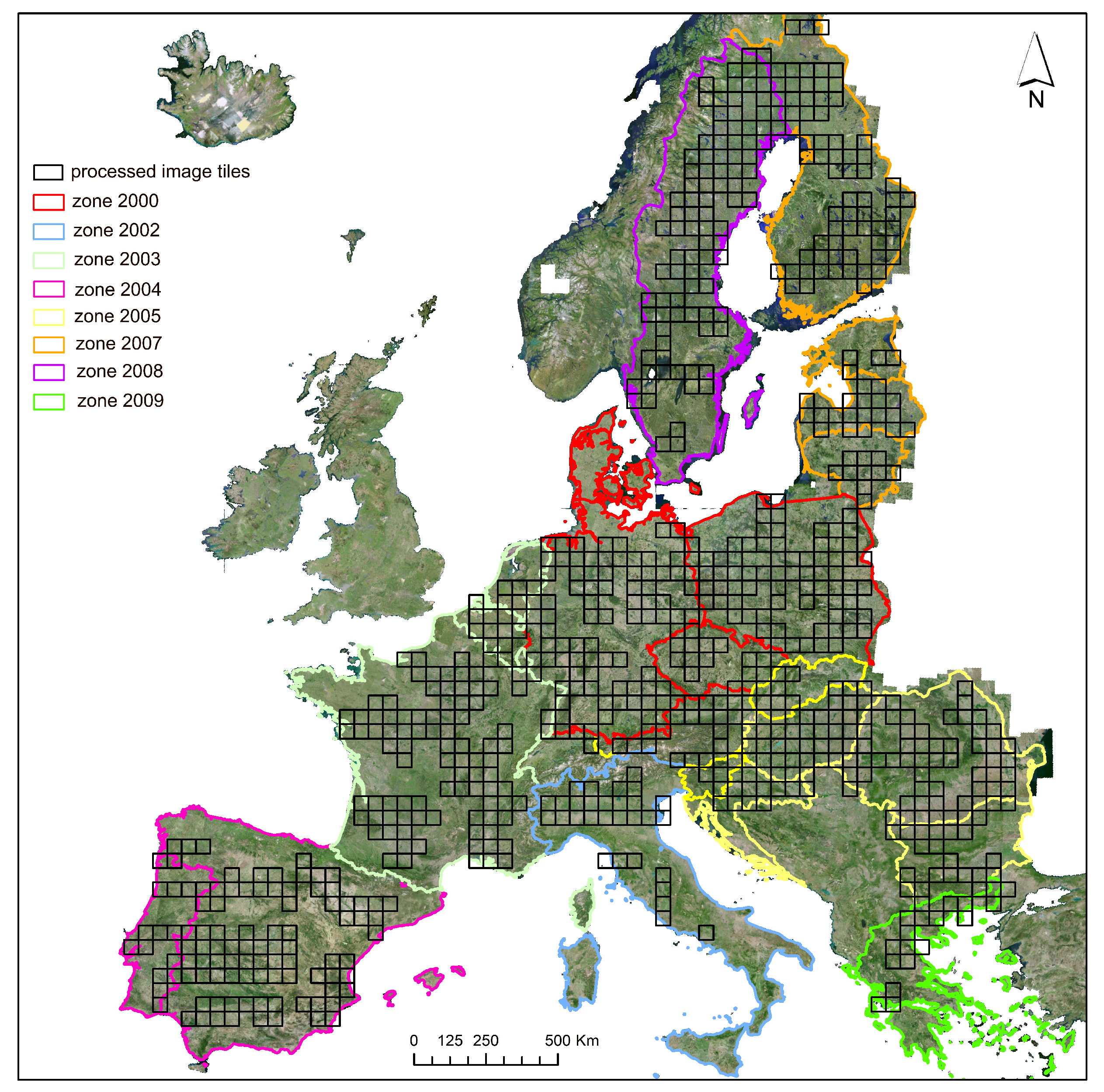
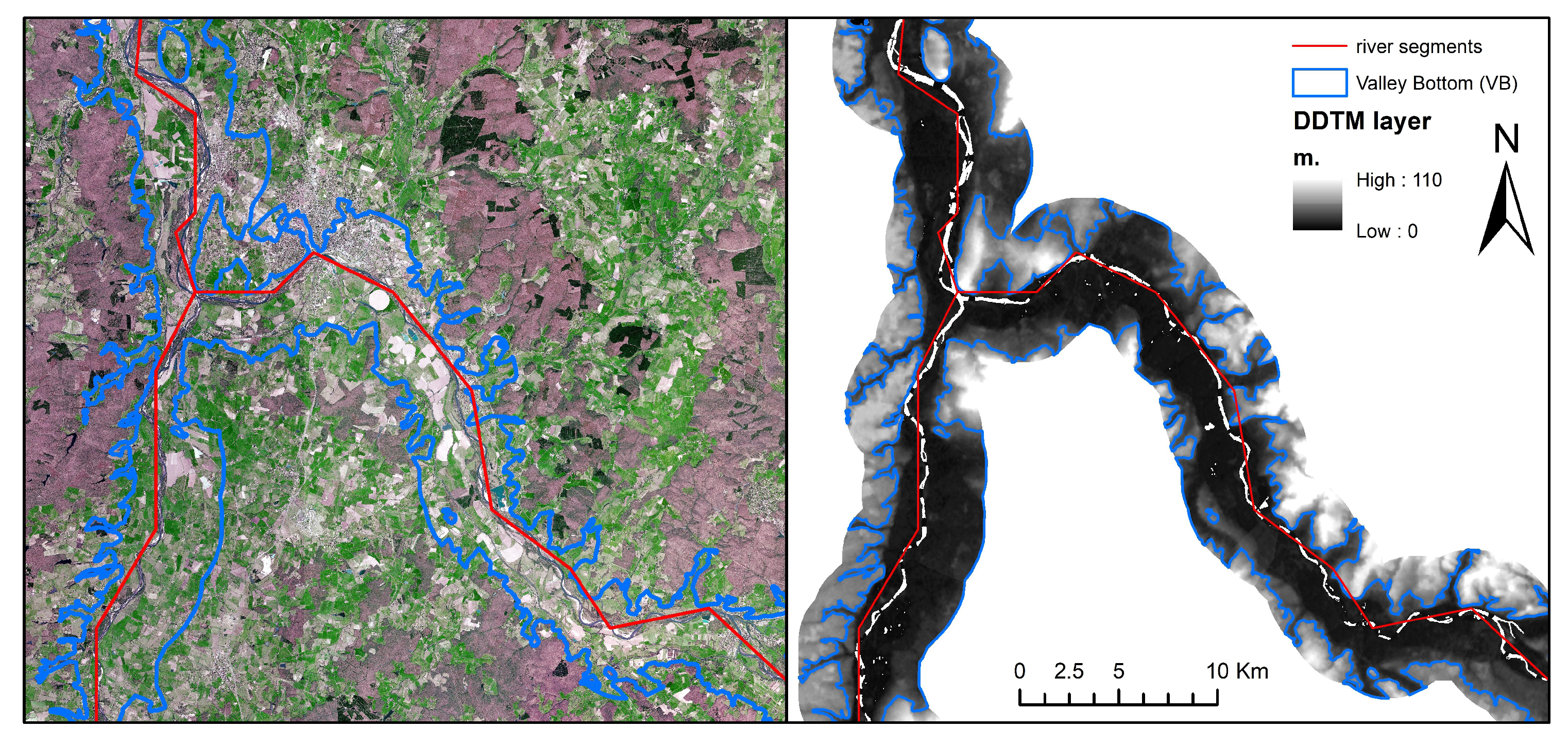
- DDTM layer, computed at 25 m resolution
- VB shapefile
3.2. Two-Level Hierarchical Object-Based Segmentation and Reference Dataset
3.3. Ensemble Learning Classification and Validation
4. Results
4.1. Pre-Processing and GEOBIA Segmentation Results
4.2. Ensemble Learning Modelling Results
4.3. Validation of the Riverscape Units Map at Pan-European Scale
5. Discussion
5.1. Advances and Limitations of GEOBIA and EL for Mapping Riverscape Units at Pan-European Scale
5.2. Insights and Future Perspectives on the Applications of the Riverscape Units Map at Pan-European Scale
6. Conclusions
- GEOBIA is a powerful analysis approach allowing at the same time efficient automation and integration of multi-source, multi-resolution satellite data. In this case, the hierarchical object-based segmentation has proven to be a sound and robust technique for combining spectral and topographical information of different spatial resolutions and hence enhancing the capability of low spectral resolution datasets;
- Overall, the area-based assessment was a preferred method to validate the quality of an object-based map, such as the riverscape units map, improving the reliability of the classification accuracy metrics. Not taking into account polygon’s area can generate misleading information within an object-based assessment;
- Random forest proved to be the most efficient classifier among other well-known classifiers tested in this work: extra tree (ET), gradient tree boosting (GTB), extreme gradient boost (XGB) and voting classifier (VC);
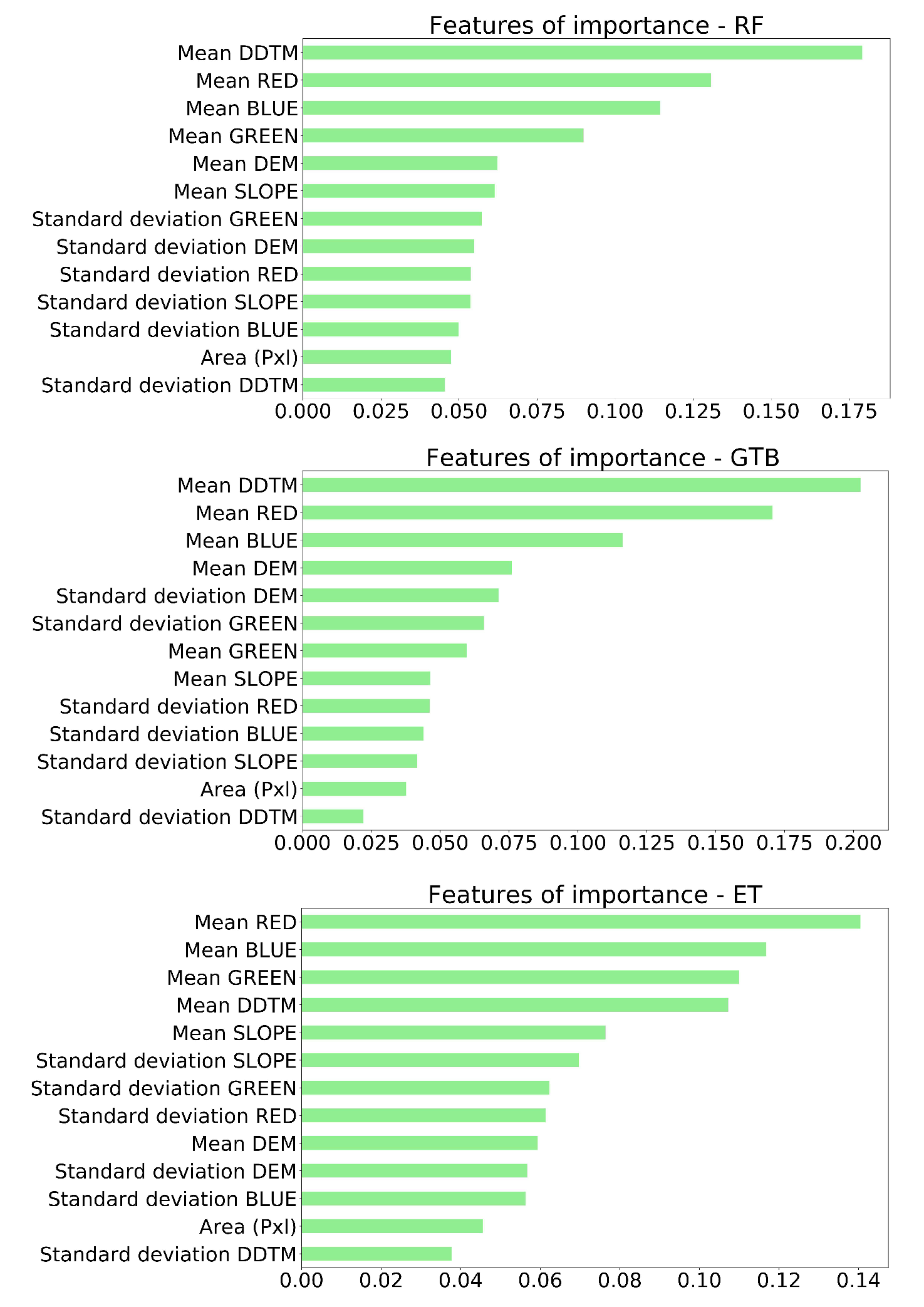
- The detrended digital terrain model (DDTM), calculated in GIS and representing the height of floodplain pixels with respect to the water channel, proved to be the most important and required feature to classify the investigated classes;
- Almost 2 million square kilometers of the European territory were processed and mapped automatically into main riverscape units at 2.5-m spatial resolution, with a global accuracy of OA = 0.915 and per-class F1 scores of: water (W) = 0.97, sediment bars (SB) = 0.79, riparian vegetation (RV) = 0.83 and other floodplain units (OFU) = 0.93;
- The Copernicus VHR layer—although developed as a visual seamless mosaic from pan-sharpened SPOT5 data at 10-m spatial resolution, and with missing near-infrared band—still proved to be a useful layer for automated image analysis and classification if exploited in the proper way, and in combination with other sources of data;
- The produced riverscape units map at pan-European scale was a novel product not existing so far, representing a notable source of information for forthcoming studies aimed at fluvial geomorphological processes monitoring at the continental scale. If a similar mapping were applied in the future to sequential RS observations, it could be possible to generate an archive of spatial and topographical riverscape units’ characteristics, measured in an objective and quantitative way, through time and continuously along the main European river networks. Such information could help advance scientific understanding of fluvial geomorphology, while providing tools for river managers to design large-scale cost-effective rehabilitation plans and assess their effectiveness.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- European Environmental Agency. European Waters: Assessment of Status and Pressures; EEA Report No 7/2018; EEA: Copenaghen, Denmark, 2018.
- Rinaldi, M.; Surian, N.; Comiti, F.; Bussettini, M. A method for the assessment and analysis of the hydromorphological condition of Italian streams: The Morphological Quality Index (MQI). Geomorphology 2013, 180, 96–108. [Google Scholar] [CrossRef]
- Raven, P.J.; Holmes, N.T.H.; Charrier, P.; Dawson, F.H.; Naura, M.; Boon, P.J. Towards a harmonized approach for hydromorphological assessment of rivers in Europe: A qualitative comparison of three survey methods. Aquat. Conserv. Mar. Freshw. Ecosyst. 2002, 12, 405–424. [Google Scholar] [CrossRef]
- Carbonneau, P.; Fonstad, M.A.; Marcus, W.A.; Dugdale, S.J. Making riverscapes real. Geomorphology 2012, 137, 74–86. [Google Scholar] [CrossRef]
- Marcus, W.A.; Fonstad, M.A. Remote sensing of rivers: The emergence of a subdiscipline in the river sciences. Earth Surf. Process. Landf. 2010, 35, 1867–1872. [Google Scholar] [CrossRef]
- Piégay, H.; Arnaud, F.; Belletti, B.; Bertrand, M.; Bizzi, S.; Carbonneau, P.; Dufour, S.; Liébault, F.; Ruiz-Villanueva, V.; Slater, L. Remotely sensed rivers in the Anthropocene: State of the art and prospects. Earth Surf. Process. Landf. 2020, 45, 157–188. [Google Scholar] [CrossRef]
- Belletti, B.; Dufour, S.; Piégay, H. What Is the Relative Effect of Space and Time To Explain the Braided River Width and Island Patterns At a Regional Scale? River Res. Appl. 2013, 31, 1–15. [Google Scholar] [CrossRef]
- Marcus, W.A.; Fonstad, M.A.; Legleiter, C.J. Management Applications of Optical Remote Sensing in the Active River Channel. In Fluvial Remote Sensing for Science and Management; Carbonneau, P., Piegay, H., Eds.; John Wiley & Sons, Ltd.: Chichester, UK, 2012; pp. 19–42. [Google Scholar]
- Ham, D.; Church, M. Channel Island and Active Channel Stability in the Lower Fraser River Gravel Reach; Department of Geography, the University of British Columbia: Vancouver, BC, Canada, 2002. [Google Scholar]
- Gurnell, A.M.; Petts, G.E.; Hannah, D.M.; Smith, B.P.G.; Edwards, P.J.; Kollmann, J.; Ward, J.V.; Tockner, K. Riparian vegetation and island formation along the gravel—Bed Fiume Tagliamento, Italy. Earth Surf. Process. Landf. 2001, 26, 31–62. [Google Scholar] [CrossRef]
- Spada, D.; Molinari, P.; Bertoldi, W.; Vitti, A.; Zolezzi, G. Multi-Temporal Image Analysis for Fluvial Morphological Characterization with Application to Albanian Rivers. ISPRS Int. J. Geo Inf. 2018, 7, 314. [Google Scholar] [CrossRef] [Green Version]
- Jones, J.; Börger, L.; Tummers, J.; Jones, P.; Lucas, M.; Kerr, J.; Kemp, P.; Bizzi, S.; Consuegra, S.; Marcello, L.; et al. A comprehensive assessment of stream fragmentation in Great Britain. Sci. Total Environ. 2019, 673, 756–762. [Google Scholar] [CrossRef] [Green Version]
- Grizzetti, B.; Pistocchi, A.; Liquete, C.; Udias, A.; Bouraoui, F.; Van De Bund, W. Human pressures and ecological status of European rivers. Sci. Rep. 2017, 7, 205. [Google Scholar] [CrossRef] [Green Version]
- Fehér, J.; Judit, G.; Kinga Szurdiné Veres András, K.; Kari, A.; Lidija, G.; Tina, K.; Monika, P.; Claudette, S.; Theo, P.; Ekaterina Laukkonen Anna-Stiina, H.; et al. Hydromorphological Alterations and Pressures in European Rivers, Lakes, Transitional and Coastal Waters; European Topic Centre on Inland, Coastal and Marine Waters: Prague, Czech Republic, 2012; Volume 2. [Google Scholar]
- Bertrand, M.; Piégay, H.; Pont, D.; Liébault, F.; Sauquet, E. Sensitivity analysis of environmental changes associated with riverscape evolutions following sediment reintroduction: Geomatic approach on the Drôme River network, France. Int. J. River Basin Manag. 2013, 11, 19–32. [Google Scholar] [CrossRef]
- Belletti, B.; Dufour, S.; Piégay, H. Regional assessment of the multi-decadal changes in braided riverscapes following large floods (Example of 12 reaches in South East of France). Adv. Geosci. 2014, 37, 57–71. [Google Scholar] [CrossRef] [Green Version]
- Demarchi, L.; Bizzi, S.; Piégay, H. Regional hydromorphological characterization with continuous and automated remote sensing analysis based on VHR imagery and low-resolution LiDAR data. Earth Surf. Process. Landf. 2017, 42, 531–551. [Google Scholar] [CrossRef]
- Bizzi, S.; Piégay, H.; Demarchi, L.; van de Bund, W.; Weissteiner, C.J.; Gob, F. LiDAR-based fluvial remote sensing to assess 50–100-year human-driven channel changes at a regional level: The case of the Piedmont. Earth Surf. Process. Landf. 2019, 44, 471–489. [Google Scholar] [CrossRef]
- Lang, S.; Hay, G.J.; Baraldi, A.; Tiede, D.; Blaschke, T. Geobia Achievements and Spatial Opportunities in the Era of Big Earth Observation Data. ISPRS Int. J. Geo Inf. 2019, 8, 474. [Google Scholar] [CrossRef] [Green Version]
- Hay, G.J.; Castilla, G. Geographic object-based image analysis (GEOBIA): A new name for a new discipline. In Lecture Notes in Geoinformation and Cartography; Blaschke, T., Lang, S., Hay, G.J., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 75–89. ISBN 978-3-540-77058-9. [Google Scholar]
- Belgiu, M.; Csillik, O. Sentinel-2 cropland mapping using pixel-based and object-based time-weighted dynamic time warping analysis. Remote Sens. Environ. 2018, 204, 509–523. [Google Scholar] [CrossRef]
- Blaschke, T.; Hay, G.J.; Kelly, M.; Lang, S.; Hofmann, P.; Addink, E.; Queiroz Feitosa, R.; van der Meer, F.; van der Werff, H.; van Coillie, F.; et al. Geographic Object-Based Image Analysis—Towards a new paradigm. ISPRS J. Photogramm. Remote Sens. 2014, 87, 180–191. [Google Scholar] [CrossRef] [Green Version]
- Garcia-Pedrero, A.; Gonzalo-Martin, C.; Fonseca-Luengo, D.; Lillo-Saavedra, M. A GEOBIA Methodology for Fragmented Agricultural Landscapes. Remote Sens. 2015, 7, 767–787. [Google Scholar] [CrossRef] [Green Version]
- Liu, D.; Xia, F. Assessing object-based classification: Advantages and limitations. Remote Sens. Lett. 2010, 1, 187–194. [Google Scholar] [CrossRef]
- Georganos, S.; Grippa, T.; Vanhuysse, S.; Lennert, M.; Shimoni, M.; Kalogirou, S.; Wolff, E. Less is more: Optimizing classification performance through feature selection in a very-high-resolution remote sensing object-based urban application. GISci. Remote Sens. 2018, 55, 221–242. [Google Scholar] [CrossRef]
- Chen, G.; Weng, Q.; Hay, G.J.; He, Y. Geographic object-based image analysis (GEOBIA): Emerging trends and future opportunities. GISci. Remote Sens. 2018, 55, 159–182. [Google Scholar] [CrossRef]
- Ma, L.; Li, M.; Ma, X.; Cheng, L.; Du, P.; Liu, Y. A review of supervised object-based land-cover image classification. ISPRS J. Photogramm. Remote Sens. 2017, 130, 277–293. [Google Scholar] [CrossRef]
- Ardabili, S.; Mosavi, A.; Várkonyi-Kóczy, A.R. Advances in Machine Learning Modeling Reviewing Hybrid and Ensemble Methods. In Engineering for Sustainable Future. INTER-ACADEMIA 2019. Lecture Notes in Networks and Systems; Várkonyi-Kóczy, A., Ed.; Springer: Cham, Switzerland, 2020; pp. 215–227. [Google Scholar] [CrossRef]
- Seni, G.; Elder, J.F. Ensemble Methods in Data Mining: Improving Accuracy Through Combining Predictions; Morgan & Claypool Publishers: Williston, ND, USA, 2010; Volume 2. [Google Scholar]
- Onojeghuo, A.O.; Onojeghuo, A.R. Object-based habitat mapping using very high spatial resolution multispectral and hyperspectral imagery with LiDAR data. Int. J. Appl. Earth Obs. Geoinf. 2017, 59, 79–91. [Google Scholar] [CrossRef]
- Amini, S.; Homayouni, S.; Safari, A.; Darvishsefat, A.A. Object-based classification of hyperspectral data using Random Forest algorithm. Geo Spat. Inf. Sci. 2018, 21, 127–138. [Google Scholar] [CrossRef] [Green Version]
- Qian, Y.; Zhou, W.; Yan, J.; Li, W.; Han, L. Comparing Machine Learning Classifiers for Object-Based Land Cover Classification Using Very High Resolution Imagery. Remote Sens. 2014, 7, 153–168. [Google Scholar] [CrossRef]
- Jozdani, S.E.; Johnson, B.A.; Chen, D. Comparing Deep Neural Networks, Ensemble Classifiers, and Support Vector Machine Algorithms for Object-Based Urban Land Use/Land Cover Classification. Remote Sens. 2019, 11, 1713. [Google Scholar] [CrossRef] [Green Version]
- Demarchi, L.; Bizzi, S.; Piégay, H. Hierarchical Object-Based Mapping of Riverscape Units and in-Stream Mesohabitats Using LiDAR and VHR Imagery. Remote Sens. 2016, 8, 97. [Google Scholar] [CrossRef] [Green Version]
- Shen, H.; Lin, Y.; Tian, Q.; Xu, K.; Jiao, J. A comparison of multiple classifier combinations using different voting-weights for remote sensing image classification. Int. J. Remote Sens. 2018, 39, 3705–3722. [Google Scholar] [CrossRef]
- Vogt, J.; Soille, P.; De Jager, A.; Rimavičiūtė, E.; Mehl, W.; Foisneau, S.; Bódis, K.; Dusart, J.; Paracchini, M.L.; Haastrup, P.; et al. A Pan-European River and Catchment Database; OPOCE: Luxembourg, 2007. [Google Scholar]
- Copernicus Land Monitoring Services Very High Resolution Image Mosaic 2012—True Colour (2.5 m). Available online: https://land.copernicus.eu/imagery-in-situ/european-image-mosaics/very-high-resolution/vhr-2012?tab=metadata (accessed on 2 March 2020).
- European Parliament-Council of the European Union. EC Council Directive 1059/2003 on the Establishment of a Common Classification of Territorial Units for Statistics (NUTS); European Parliament-Council of the European Union: Brussel, Belgium, 2003. [Google Scholar]
- Demarchi, L.; Canters, F.; Chan, J.C.-W.; Van de Voorde, T. Multiple Endmember Unmixing of CHRIS/Proba Imagery for Mapping Impervious Surfaces in Urban and Suburban Environments. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3409–3424. [Google Scholar] [CrossRef]
- Weng, Q. Remote sensing of impervious surfaces in the urban areas: Requirements, methods, and trends. Remote Sens. Environ. 2012, 117, 34–49. [Google Scholar] [CrossRef]
- Roux, C.; Alber, A.; Bertrand, M.; Vaudor, L.; Piégay, H. “FluvialCorridor”: A new ArcGIS toolbox package for multiscale riverscape exploration. Geomorphology 2014, 242, 29–37. [Google Scholar] [CrossRef]
- Alber, A.; Piégay, H. Spatial disaggregation and aggregation procedures for characterizing fluvial features at the network-scale: Application to the Rhône basin (France). Geomorphology 2011, 125, 343–360. [Google Scholar] [CrossRef]
- Notebaert, B.; Piégay, H. Multi-scale factors controlling the pattern of floodplain width at a network scale: The case of the Rhône basin, France. Geomorphology 2013, 200, 155–171. [Google Scholar] [CrossRef]
- Benz, U.C.; Hofmann, P.; Willhauck, G.; Lingenfelder, I.; Heynen, M. Multi-resolution, object-oriented fuzzy analysis of remote sensing data for GIS-ready information. ISPRS J. Photogramm. Remote Sens. 2004, 58, 239–258. [Google Scholar] [CrossRef]
- Saini, R.; Ghosh, S.K. Ensemble classifiers in remote sensing: A review. In Proceedings of the International Conference on Computing, Communication and Automation (ICCCA), Greater Noida, India, 5–6 May 2017; IEEE: Greater Noida, India, 2017. [Google Scholar]
- Briem, G.J.; Benediktsson, J.A.; Sveinsson, J.R. Boosting, bagging, and consensus based classification of multisource remote sensing data. In Multiple Classifier Systems. MCS 2001. Lecture Notes in Computer Science; Kittler, J., Roli, F., Eds.; Springer: Berlin/Heidelberg, Germany, 2001; Volume 2096, pp. 279–288. ISBN 3540422846. [Google Scholar]
- Ghimire, B.; Rogan, J.; Galiano, V.; Panday, P.; Neeti, N. An evaluation of bagging, boosting, and random forests for land-cover classification in Cape Cod, Massachusetts, USA. GISci. Remote Sens. 2012, 49, 623–643. [Google Scholar] [CrossRef]
- Hastie, T.; Tibshirani, R.; Friedman, J. The Elements of Statistical Learning. Data Mining, Inference, and Prediction, 2nd ed.; Springer Series in Statistics, Verlag: New York, NY, USA, 2009. [Google Scholar]
- Breiman, L. Bagging predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef] [Green Version]
- Ho, T.K. A data complexity analysis of comparative advantages of decision forest constructors. Pattern Anal. Appl. 2002, 5, 102–112. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăgu, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Chan, J.C.W.; Paelinckx, D. Evaluation of Random Forest and Adaboost tree-based ensemble classification and spectral band selection for ecotope mapping using airborne hyperspectral imagery. Remote Sens. Environ. 2008, 112, 2999–3011. [Google Scholar] [CrossRef]
- Pal, M. Random forest classifier for remote sensing classification. Int. J. Remote Sens. 2005, 26, 217–222. [Google Scholar] [CrossRef]
- Tian, S.; Zhang, X.; Tian, J.; Sun, Q. Random Forest Classification of Wetland Landcovers from Multi-Sensor Data in the Arid Region of Xinjiang, China. Remote Sens. 2016, 8, 954. [Google Scholar] [CrossRef] [Green Version]
- Abdel-Rahman, E.M.; Ahmed, F.B.; Ismail, R. Random forest regression and spectral band selection for estimating sugarcane leaf nitrogen concentration using EO-1 Hyperion hyperspectral data. Int. J. Remote Sens. 2013, 34, 712–728. [Google Scholar] [CrossRef]
- Geurts, P.; Ernst, D.; Wehenkel, L. Extremely randomized trees. Mach. Learn. 2006, 63, 3–42. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L. Arcing classifiers. Ann. Stat. 1998, 26, 801–849. [Google Scholar] [CrossRef]
- Schapire, R.E. The strength of weak learnability. Mach. Learn. 1990, 5, 197–227. [Google Scholar] [CrossRef] [Green Version]
- Khairuddin, A.R.; Alwee, R.; Haron, H. A proposed gradient tree boosting with different loss function in crime forecasting and analysis. In Emerging Trends in Intelligent Computing and Informatics. IRICT 2019. Advances in Intelligent Systems and Computing; Saeed, F., Mohammed, F., Gazem, N., Eds.; Springer: Cham, Switzerland, 2020; Volume 1073, pp. 189–198. [Google Scholar]
- Boschetti, A.; Massaron, L. Python Data Science Essentials; Packt Publishing Limited: Birmingham, UK, 2015; ISBN 9780874216561. [Google Scholar]
- Friedman, J.H. Greedy function approximation: A gradient boosting machine. Ann. Stat. 2001, 29, 1189–1232. [Google Scholar] [CrossRef]
- Georganos, S.; Grippa, T.; Vanhuysse, S.; Lennert, M.; Shimoni, M.; Wolff, E. Very High Resolution Object-Based Land Use-Land Cover Urban Classification Using Extreme Gradient Boosting. IEEE Geosci. Remote Sens. Lett. 2018, 15, 607–611. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Eziz, A.; Xiao, J.; Tao, S.; Wang, S.; Tang, Z.; Zhu, J.; Fang, J. High-Resolution Vegetation Mapping Using eXtreme Gradient Boosting Based on Extensive Features. Remote Sens. 2019, 11, 1505. [Google Scholar] [CrossRef] [Green Version]
- Ustuner, M.; Sanli, F.B.; Abdikan, S.; Bilgin, G.; Goksel, C. A Booster Analysis of Extreme Gradient Boosting for Crop Classification using PolSAR Imagery. In Proceedings of the 2019 8th International Conference on Agro-Geoinformatics, Agro-Geoinformatics 2019, Istanbul, Turkey, 16–19 July 2019; IEEE: Istanbul, Turkey, 2019. [Google Scholar]
- Sandino, J.; Pegg, G.; Gonzalez, F.; Smith, G. Aerial Mapping of Forests Affected by Pathogens Using UAVs, Hyperspectral Sensors, and Artificial Intelligence. Sensors 2018, 18, 944. [Google Scholar] [CrossRef] [Green Version]
- Dong, H.; Xu, X.; Wang, L.; Pu, F. Gaofen-3 PolSAR Image Classification via XGBoost and Polarimetric Spatial Information. Sensors 2018, 18, 611. [Google Scholar] [CrossRef] [Green Version]
- Man, C.D.; Nguyen, T.T.; Bui, H.Q.; Lasko, K.; Nguyen, T.N.T. Improvement of land-cover classification over frequently cloud-covered areas using Landsat 8 time-series composites and an ensemble of supervised classifiers. Int. J. Remote Sens. 2018, 39, 1243–1255. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Radoux, J.; Bogaert, P. Accounting for the area of polygon sampling units for the prediction of primary accuracy assessment indices. Remote Sens. Environ. 2014, 142, 9–19. [Google Scholar] [CrossRef]
- Andrade, C. The P value and statistical significance: Misunderstandings, explanations, challenges, and alternatives. Indian J. Psychol. Med. 2019, 41, 210–215. [Google Scholar] [CrossRef]
- Buffington, J.M.; Montgomery, D.R. Geomorphic classification of river. In Treatise on Geomorphology; Shroder, J., Wohl, E., Eds.; Academic Press: San Diego, CA, USA, 2013; pp. 730–767. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Zones | Description | Number of Tiles | Area (km2) |
|---|---|---|---|
| 2000 | Germany/Poland | 124 | 310,000 |
| 2002 | Italy | 30 | 75,000 |
| 2003 | France/Benelux | 126 | 315,000 |
| 2004 | Iberian Peninsula | 89 | 222,500 |
| 2005 | Balkans | 145 | 362,500 |
| 2007 | Baltics | 83 | 207,500 |
| 2008 | Sweden | 88 | 220,000 |
| 2009 | Greece | 26 | 65,000 |
| Tot | 711 | 1,777,500 |
| Zones | Minutes | Hours | Days | Average Per Tile (min) |
|---|---|---|---|---|
| 2000 | 6039 | 100.7 | 4.2 | 48.7 |
| 2002 | 1480 | 24.7 | 1.0 | 49.3 |
| 2003 | 6720 | 112.0 | 4.7 | 53.3 |
| 2004 | 4470 | 74.5 | 3.1 | 50.2 |
| 2005 | 7380 | 123.0 | 5.1 | 50.9 |
| 2007 | 4365 | 72.8 | 3.0 | 52.6 |
| 2008 | 4830 | 80.5 | 3.4 | 54.9 |
| 2009 | 1380 | 23.0 | 1.0 | 53.1 |
| tot | 25.5 | 51.6 |
| Code | Class | 2000 | 2002 | 2003 | 2004 | 2005 | 2007 | 2008 | 2009 |
|---|---|---|---|---|---|---|---|---|---|
| 1 | OFU | 29,059 | 9999 | 31,582 | 9886 | 34,106 | 4977 | 8018 | 17,343 |
| 2 | RV | 1131 | 1131 | 6348 | 413 | 14,207 | 2861 | 692 | 14,343 |
| 3 | SB | 908 | 908 | 978 | 159 | 592 | 8 | 75 | 396 |
| 4 | W | 825 | 825 | 2826 | 2885 | 2220 | 2064 | 1877 | 652 |
| tot | 31,923 | 12,863 | 41,734 | 13,343 | 51,125 | 9910 | 10,662 | 32,734 |
| Zones | Minutes | Hours | Average Per Tile (min) |
|---|---|---|---|
| 2000 | 530 | 8.8 | 4.3 |
| 2002 | 203 | 3.4 | 6.8 |
| 2003 | 720 | 12.0 | 5.7 |
| 2004 | 525 | 8.8 | 5.9 |
| 2005 | 725 | 12.1 | 5.0 |
| 2007 | 492 | 8.2 | 5.9 |
| 2008 | 594 | 9.9 | 6.8 |
| 2009 | 220 | 3.7 | 8.5 |
| tot | 6.1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Demarchi, L.; van de Bund, W.; Pistocchi, A. Object-Based Ensemble Learning for Pan-European Riverscape Units Mapping Based on Copernicus VHR and EU-DEM Data Fusion. Remote Sens. 2020, 12, 1222. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12071222
Demarchi L, van de Bund W, Pistocchi A. Object-Based Ensemble Learning for Pan-European Riverscape Units Mapping Based on Copernicus VHR and EU-DEM Data Fusion. Remote Sensing. 2020; 12(7):1222. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12071222
Chicago/Turabian StyleDemarchi, Luca, Wouter van de Bund, and Alberto Pistocchi. 2020. "Object-Based Ensemble Learning for Pan-European Riverscape Units Mapping Based on Copernicus VHR and EU-DEM Data Fusion" Remote Sensing 12, no. 7: 1222. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12071222