
Integrated Validation of Coarse Remotely Sensed Evapotranspiration Products over Heterogeneous Land Surfaces

 ,
,  , , , , and
, , , , and
Abstract
:1. Introduction
2. Study Area and Dataset
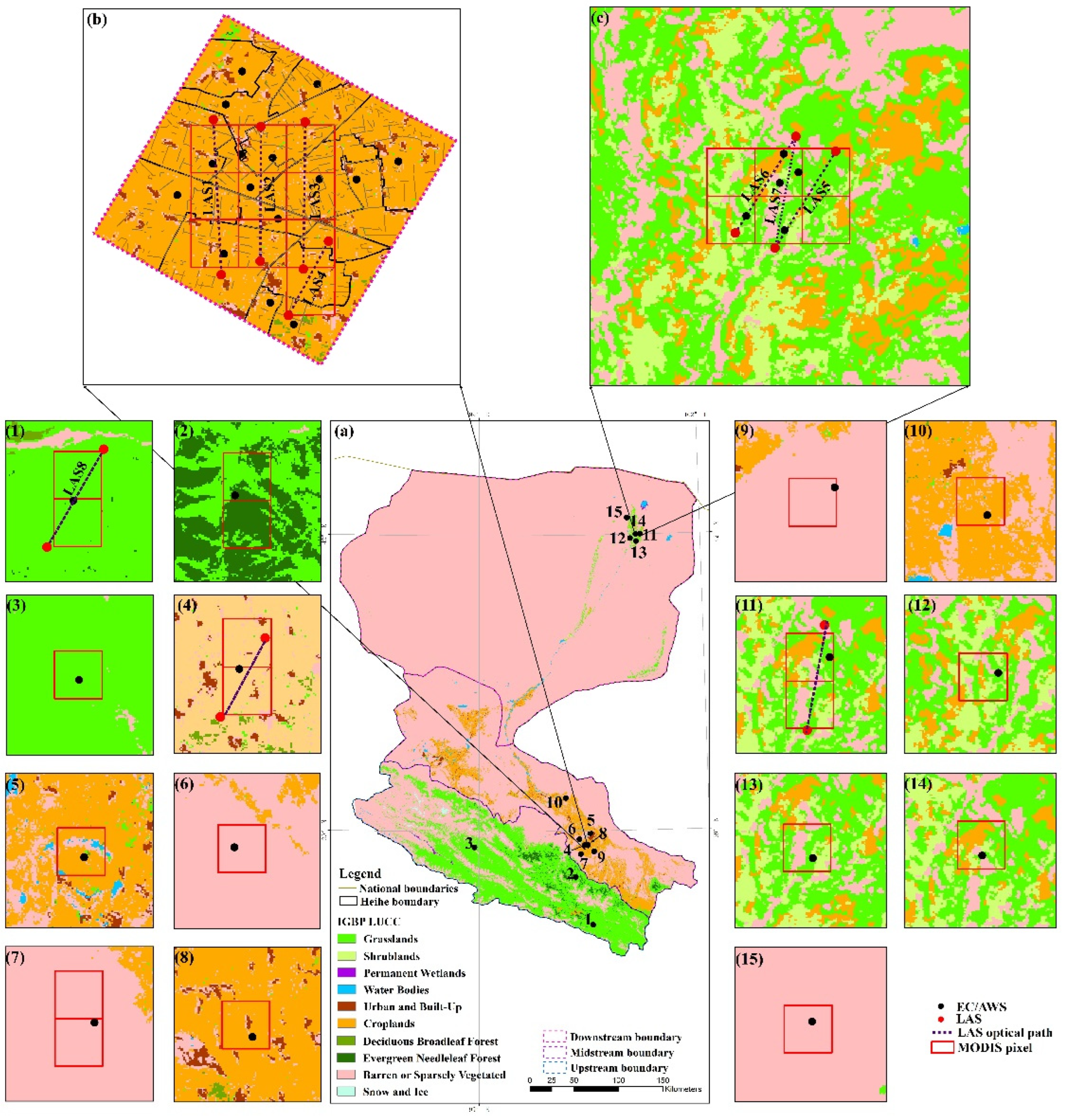
2.1. Study Area and Experiment
2.2. Remotely Sensed Evapotranspiration Products
2.3. Validation Dataset
2.3.1. Ground Truth ET
2.3.2. ET Influence Factor Data and Auxiliary Dataset
3. Methodology
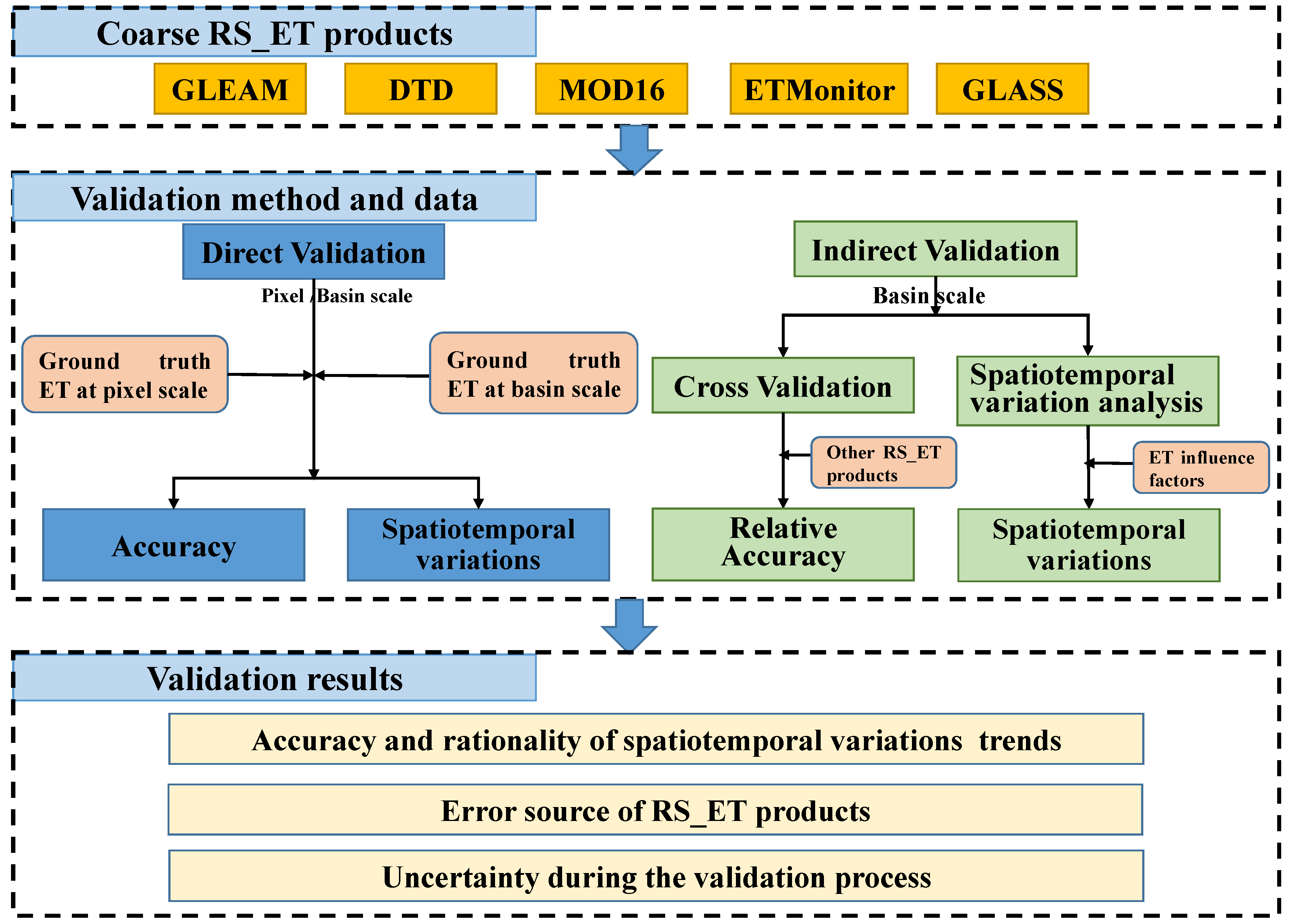
3.1. Validation Framework
3.2. Accuracy Evaluation Method
3.3. Uncertainty Evaluation Method
4. Validation Results of Coarse RS_ET Products
4.1. Direct Validation
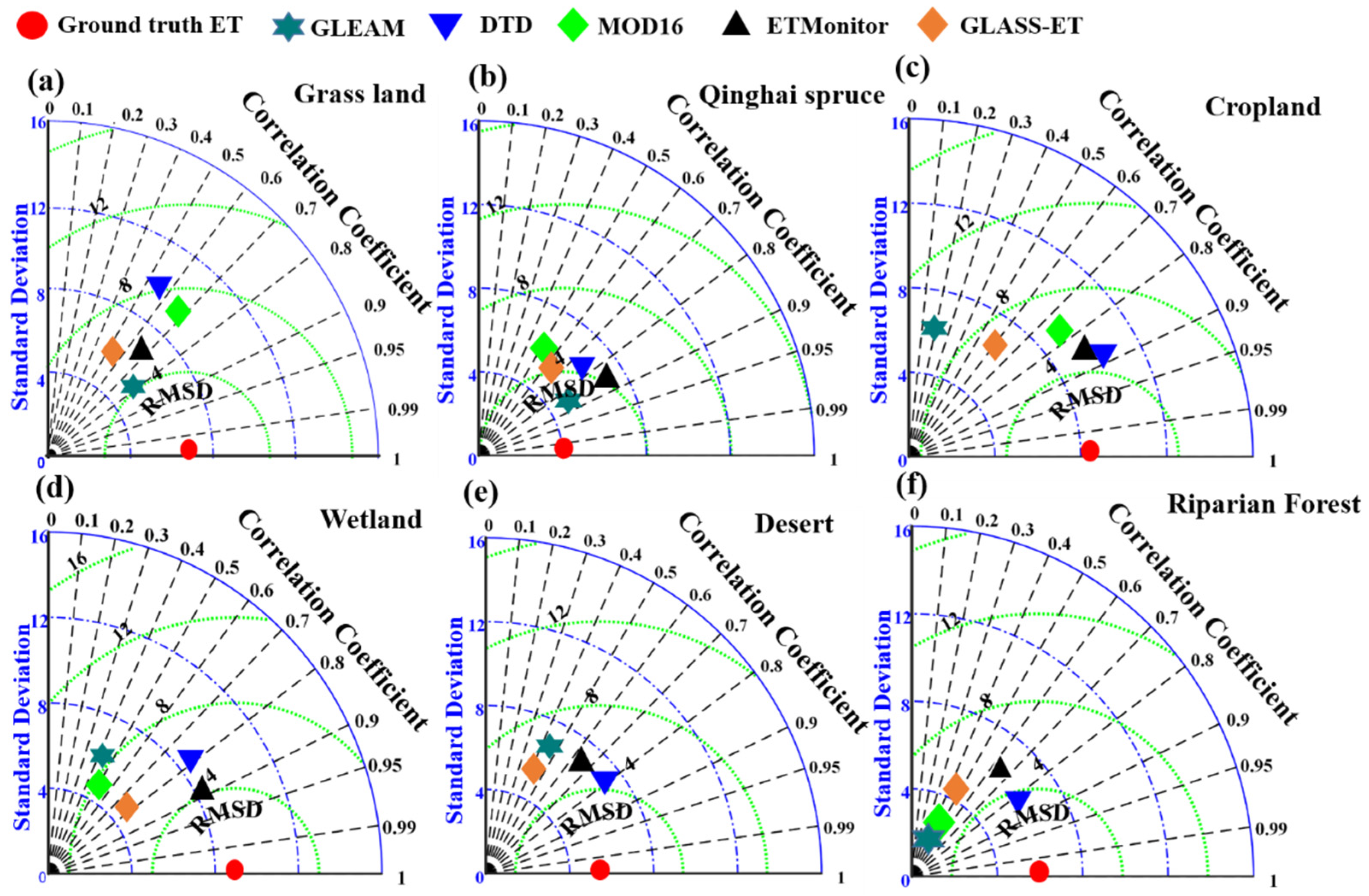
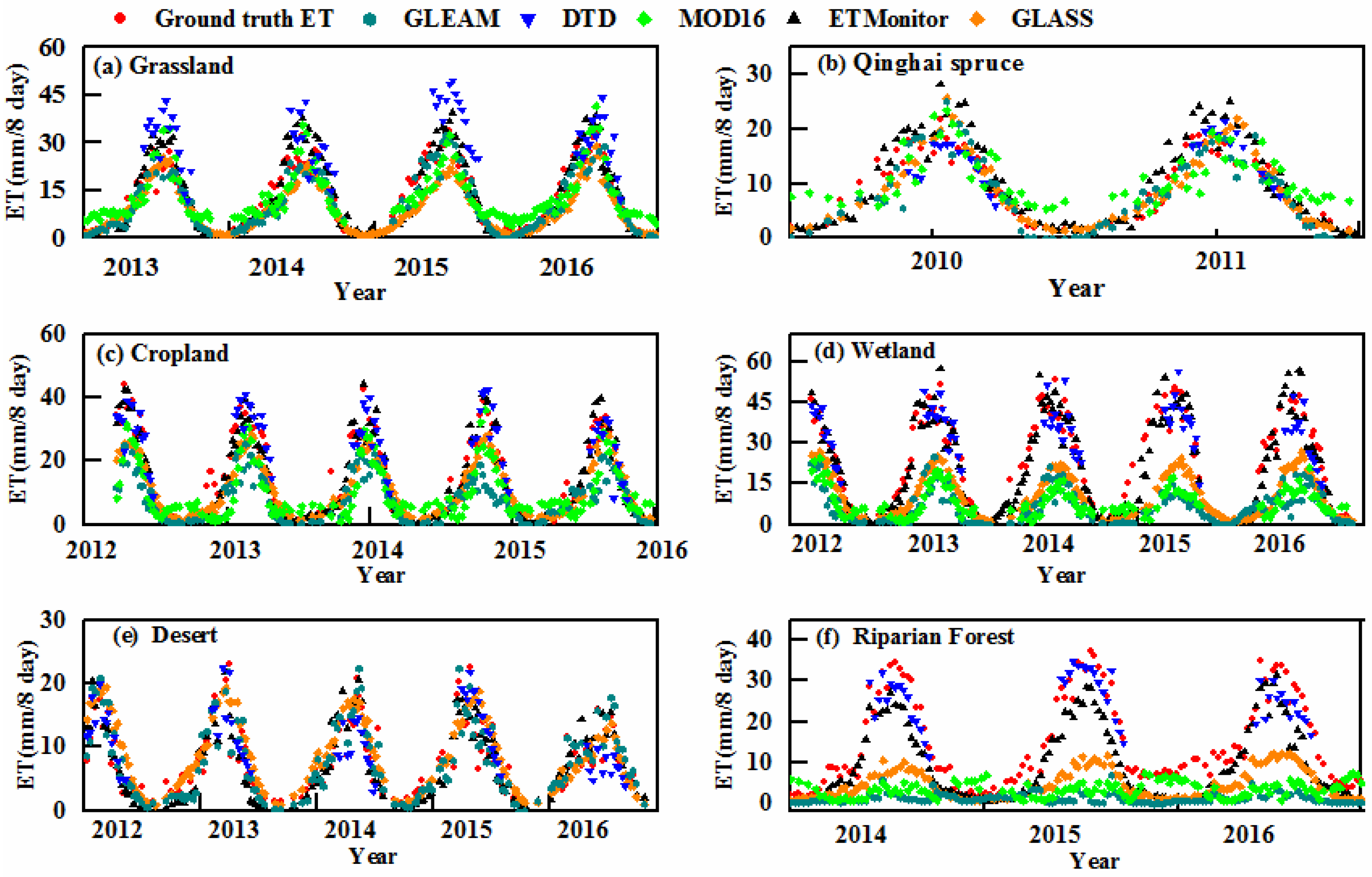
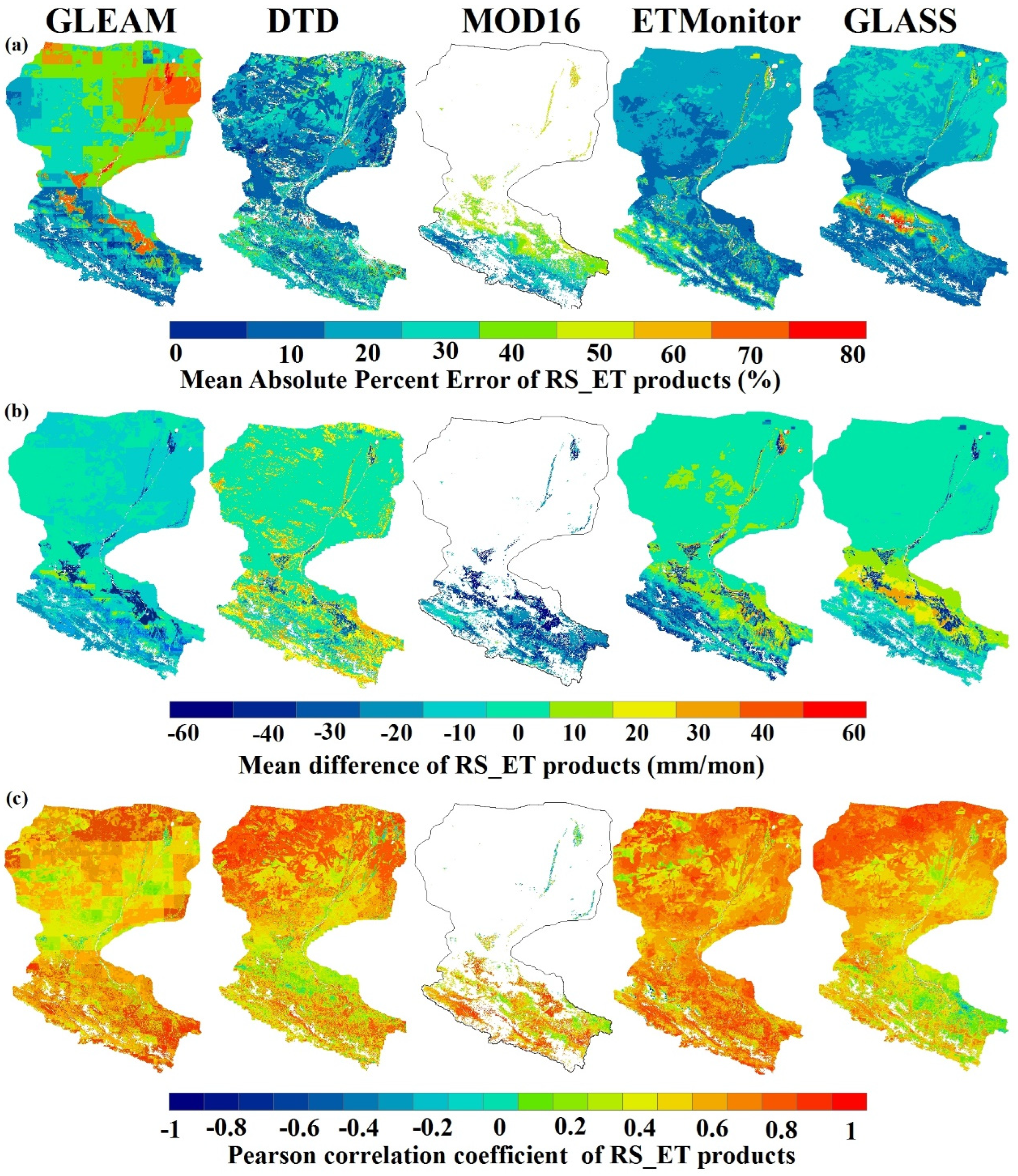
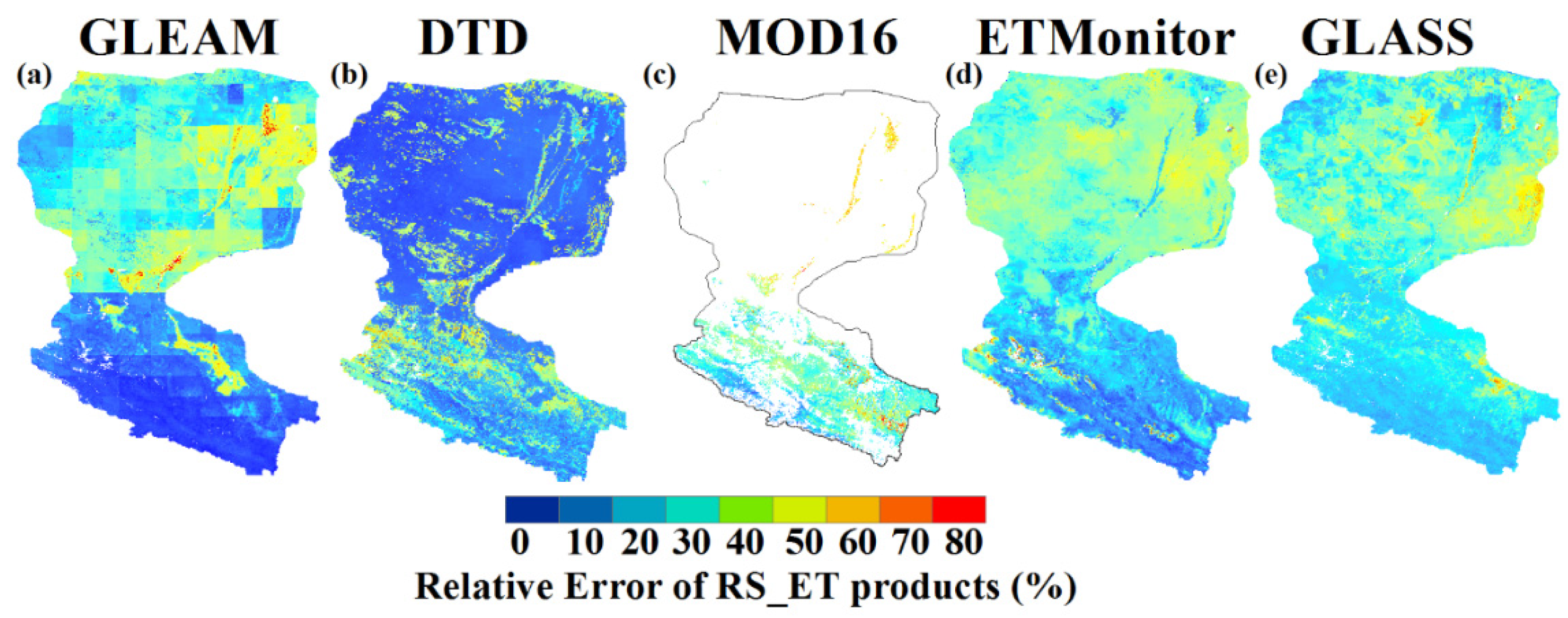
4.1.1. Validation at the Pixel Scale
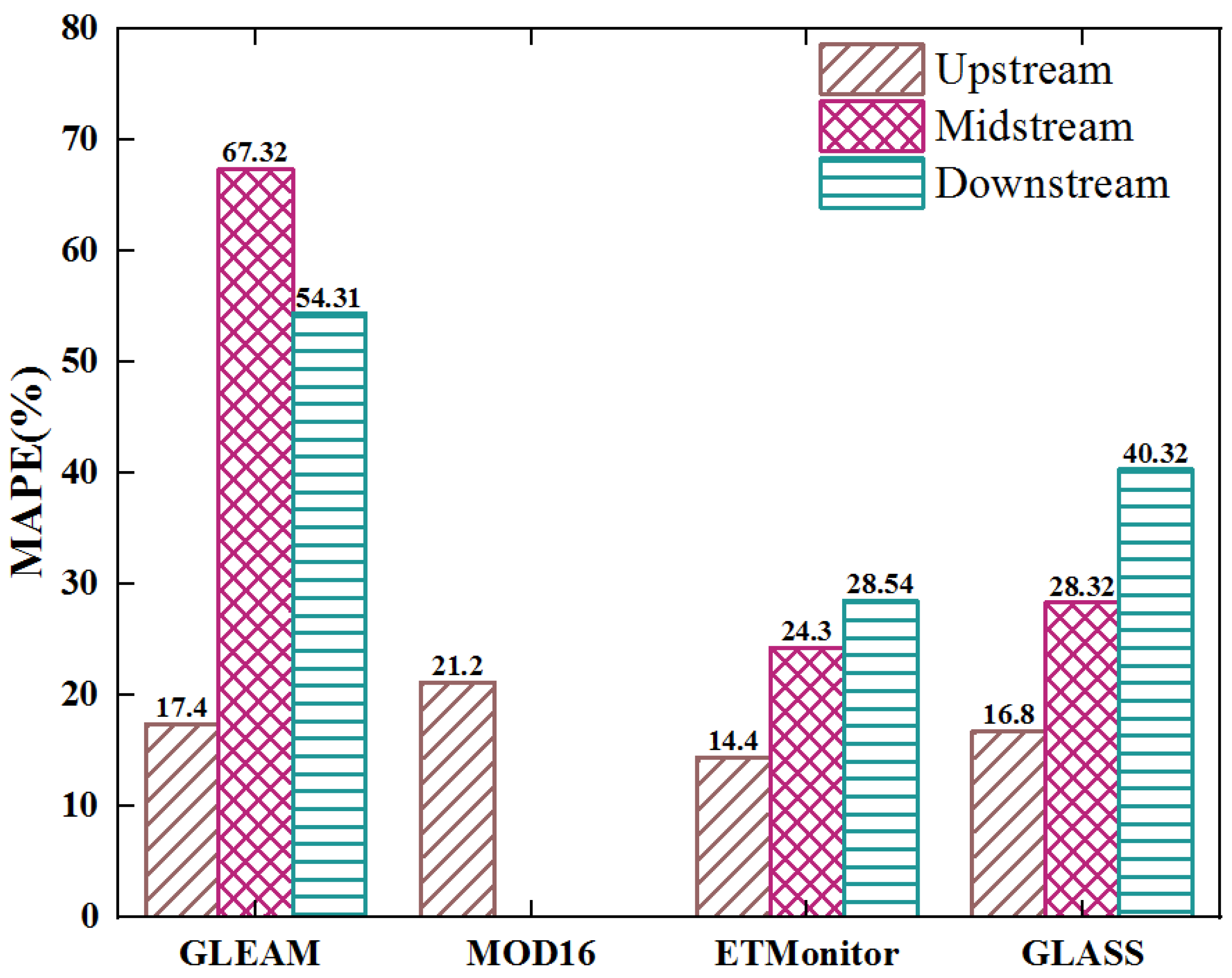
4.1.2. Validation at the Basin Scale
4.2. Indirect Validation
4.2.1. Cross-Validation
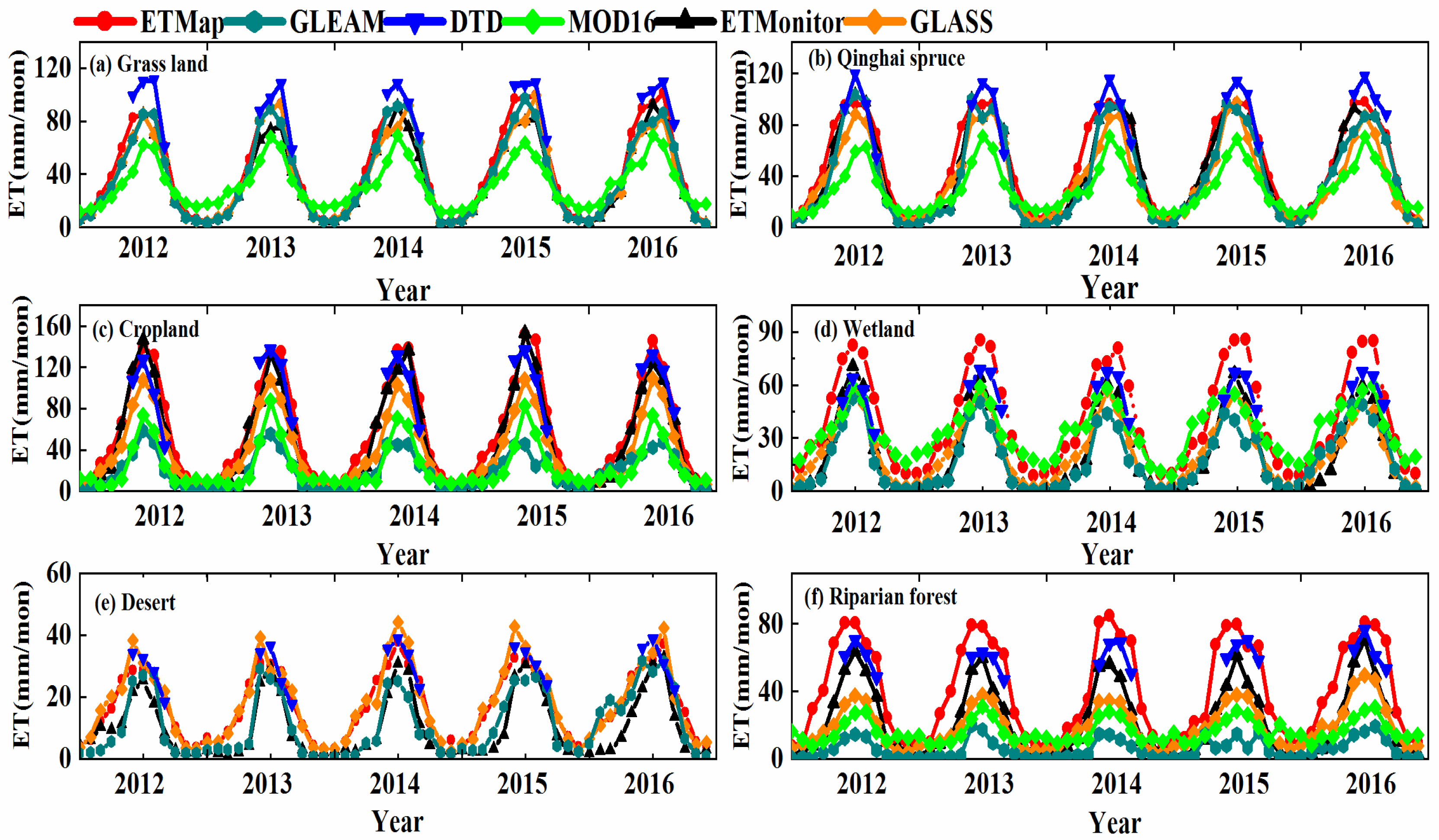
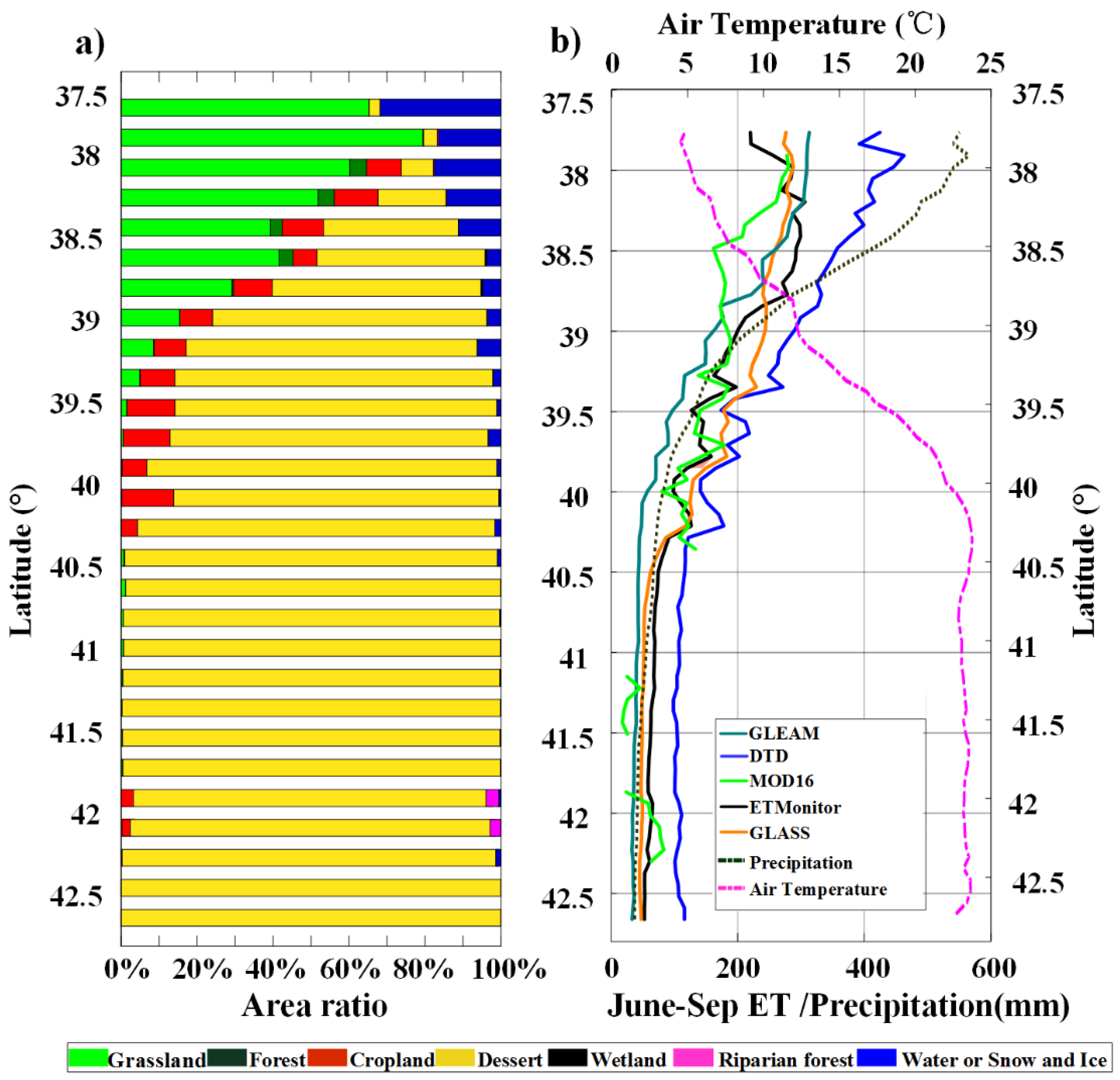
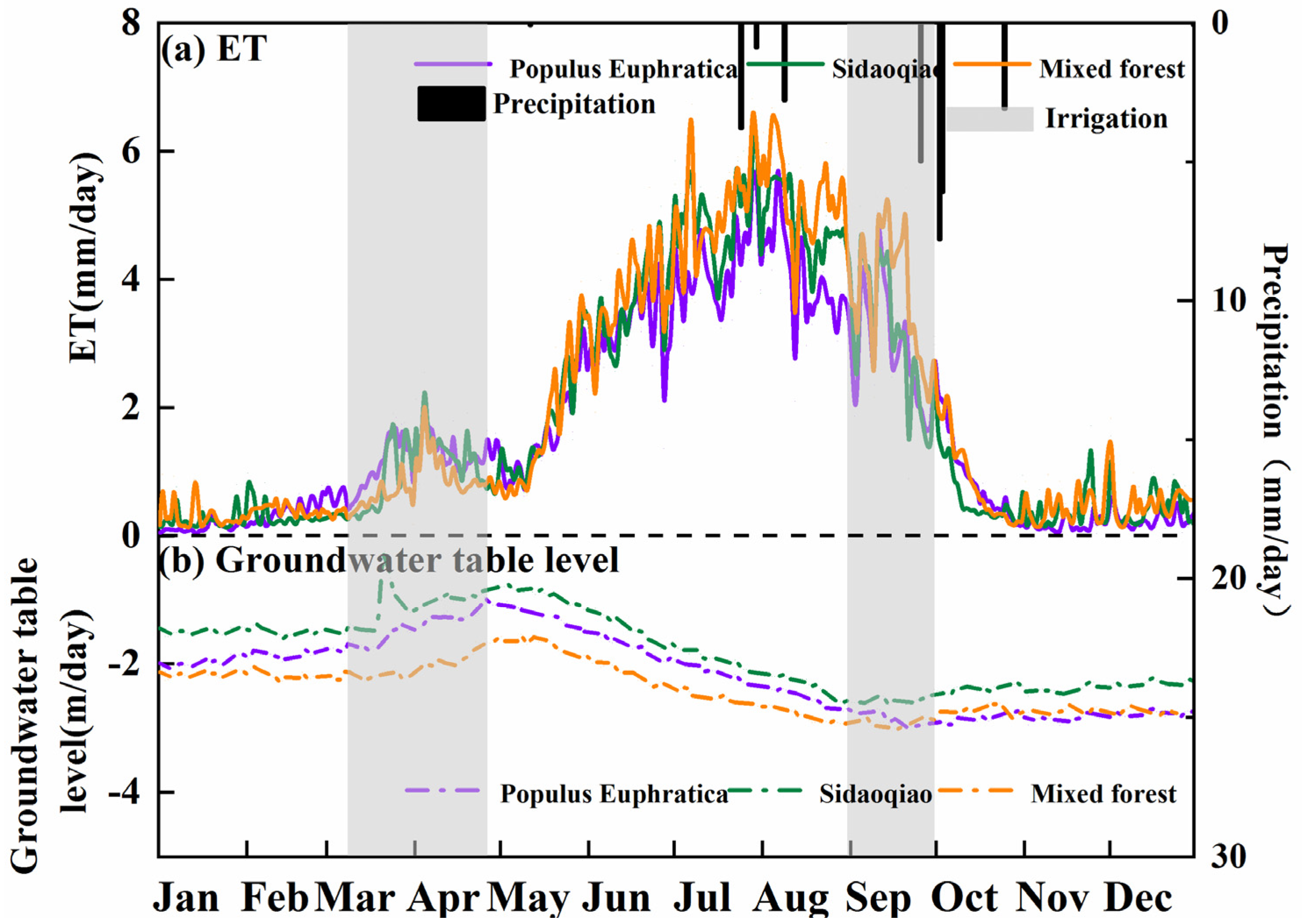
4.2.2. Spatiotemporal Variation Analysis
5. Discussion
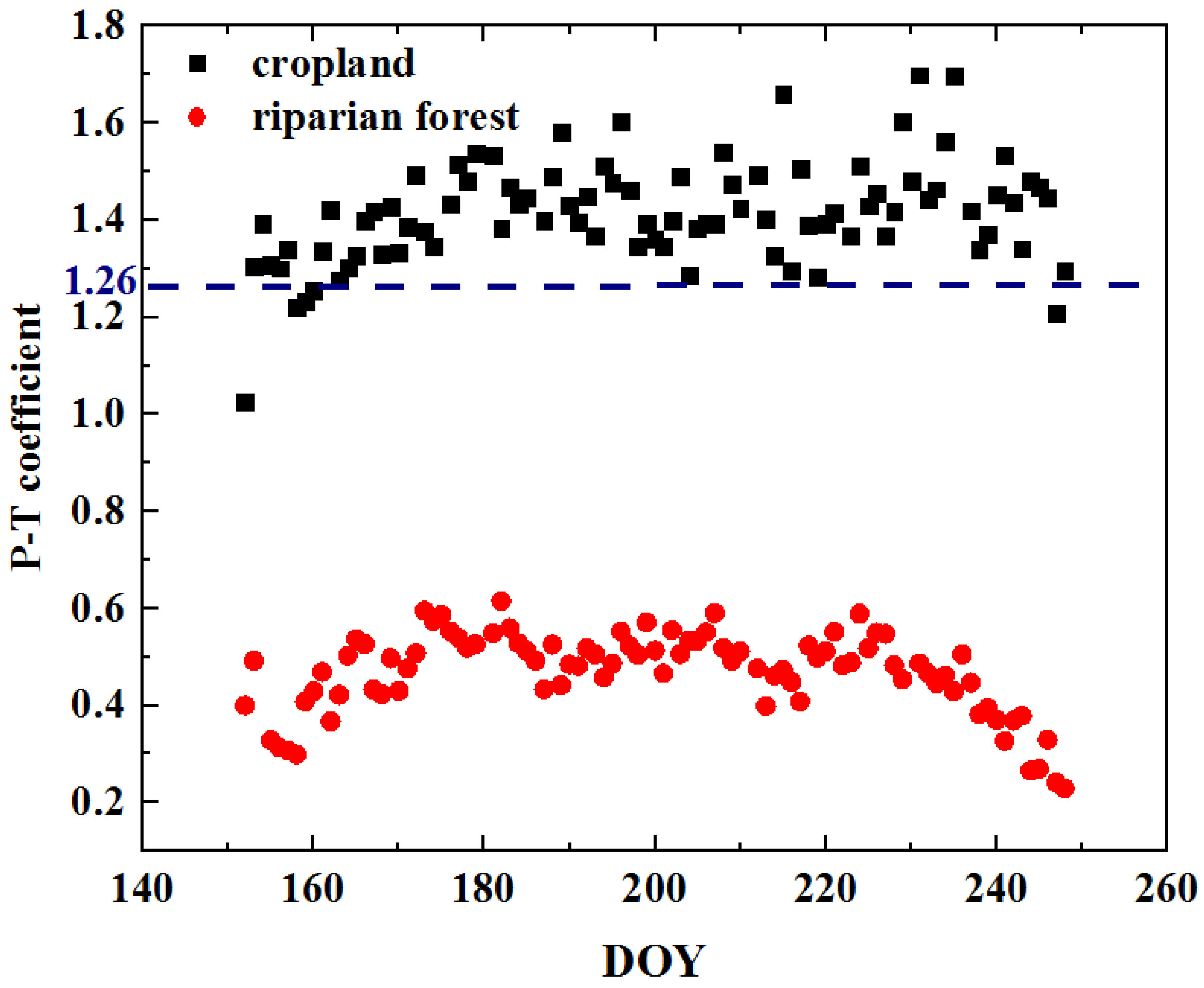
5.1. Error Sources of the RS_ET Products
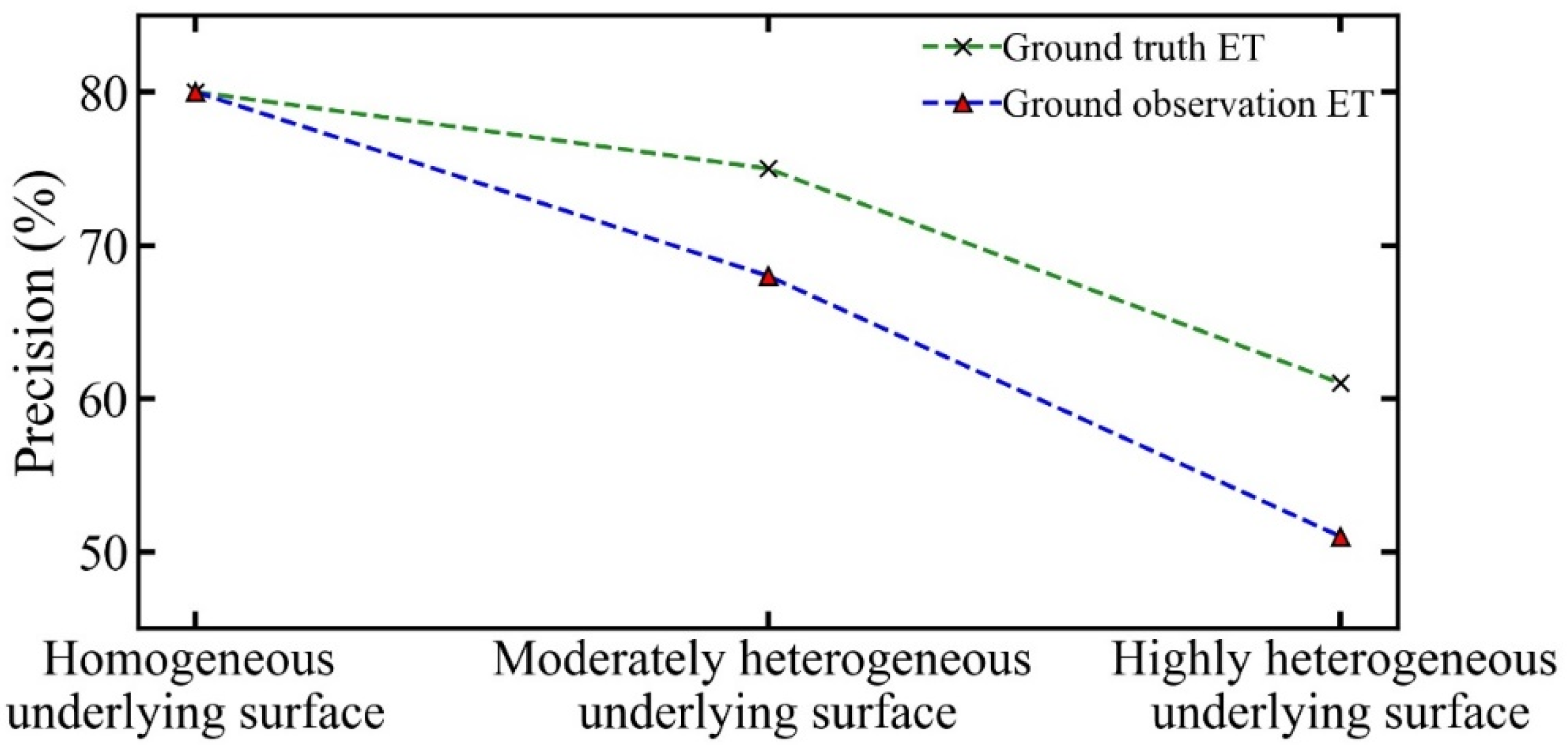
5.2. Uncertainties in the Validation Process
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RS_ET Product | Type | Variable | Dataset | Spatial Resolution | Temporal Resolution |
|---|---|---|---|---|---|
| GLEAM | Atmospheric forcing data | Precipitation | TMPA 3B42v7 | 0.25° | 1 day |
| Ta | AIRS L3RetStdv6.0 | 1° | 3 h | ||
| Remote sensing data | Radiation | CERES L3SYN1DEG | 1° | 1 day | |
| Snow–water equivalent | GLOBSNOW L3av2+ NSIDC V0.1 | 0.25° | 1 day | ||
| VOD | SMOS-LPRM | 25 km | 1 day | ||
| Soil moisture | SMOS L3 | 25 km | 1 day | ||
| Cover fractions | MOD44B | 250 m | 1 year | ||
| Soil properties | IGBP-DIS | 0.25° | 1 year | ||
| Lightning frequency | LIS/OTD | 5 km | 1 month | ||
| DTD | Atmospheric forcing data | Ta/Ws/q/Radiation | The atmospheric forcing data in the Heihe River Basin | 5 km | 1 h |
| Remote sensing data | LST | MODIS | 1 km | 1 day | |
| Albedo | MODIS | 1 km | 1 day | ||
| LAI | MODIS/GLASS | 1 km | 8 days | ||
| MOD16 | Atmospheric forcing data | Ta/Tmin/ FPAR/q | GMAO/MERRA GMAO | 0.5° × 0.6°/ 1.00° × 1.25° | 1 day |
| Remote sensing data | FPAR/LAI | MODIS | 500 m | 8 days | |
| Albedo | 500 m | 8 days | |||
| Land cover | 500 m | 1 year | |||
| ETMonitor | Atmospheric forcing data | Ta/q/Ws/Radiation | The atmospheric forcing data in the Heihe River Basin | 5 km | 1 h |
| Remote sensing data | LAI/NDVI | MODIS | 1 km | 16 days | |
| Albedo | 1 km | 8 days | |||
| LST | 1 km | 1 day | |||
| Land cover | MICLCover | 1 km | 1 year | ||
| Precipitation | TRMM | 0.25° | 1 day | ||
| Soil properties | China dataset of soil hydraulic parameters | 1 km | |||
| Soil moisture | CCI | 25 km | 1 day | ||
| GLASS | Atmospheric forcing data | Ta/Tmin/ Tmax/q/WS/Radiation | GMAO-MERRA | 0.5° × 0.667° | 1 day |
| Remote sensing data | LAI/FPAR | MODIS/ AVHRR | 1 km | 8 days | |
| NDVI/EVI | 0.05° | 16 days | |||
| Albedo | 500 m | 1 day | |||
| Land cover | UMD Land Cover Classification | 1 km | 1 year |
Appendix C
Appendix D
References
- Fisher, J.B.; Melton, F.; Middleton, E.; Hain, C.; Anderson, M.; Allen, R.; McCabe, M.F.; Hook, S.; Baldocchi, D.; Townsend, P.A.; et al. The Future of Evapotranspiration: Global Requirements for Ecosystem Functioning, Carbon and Climate Feedbacks, Agricultural Management, and Water Resources. Water Resour. Res. 2017, 53, 2618–2626. [Google Scholar] [CrossRef]
- Kalma, J.D.; McVicar, T.R.; McCabe, M.F. Estimating Land Surface Evaporation: A Review of Methods Using Remotely Sensed Surface Temperature Data. Surv. Geophys. 2008, 29, 421–469. [Google Scholar] [CrossRef]
- Wang, K.; Dickinson, R.E. A Review of Global Terrestrial Evapotranspiration: Observation, Modeling, Climatology, and Climatic Variability. Rev. Geophys. 2012, 50. [Google Scholar] [CrossRef]
- Zhang, K.; Kimball, J.S.; Running, S.W. A Review of Remote Sensing Based Actual Evapotranspiration Estimation. Wiley Interdiscip. Rev. Water 2016, 3, 834–853. [Google Scholar] [CrossRef]
- Mu, Q.; Zhao, M.; Running, S.W. Improvements to a MODIS Global Terrestrial Evapotranspiration Algorithm. Remote Sens. Environ. 2011, 115, 1781–1800. [Google Scholar] [CrossRef]
- Miralles, D.G.; De Jeu, R.A.M.; Gash, J.H.; Holmes, T.R.H.; Dolman, A.J. Magnitude and Variability of Land Evaporation and Its Components at the Global Scale. Hydrol. Earth Syst. Sci. 2011, 15, 967–981. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Su, Z.; Ma, Y.; Liu, S.; Yu, Q.; Xu, Z. Development of a 10-Year (2001-2010) 0.1° Data Set of Land-Surface Energy Balance for Mainland China. Atmos. Chem. Phys. 2014, 14, 13097–13117. [Google Scholar] [CrossRef] [Green Version]
- Jiang, C.; Ryu, Y. Multi-Scale Evaluation of Global Gross Primary Productivity and Evapotranspiration Products Derived from Breathing Earth System Simulator (BESS). Remote Sens. Environ. 2016, 186, 528–547. [Google Scholar] [CrossRef]
- Yao, Y.; Liang, S.; Li, X.; Hong, Y.; Fisher, J.B.; Zhang, N.; Chen, J.; Cheng, J.; Zhao, S.; Zhang, X.; et al. Bayesian Multimodel Estimation of Global Terrestrial Latent Heat Flux from Eddy Covariance, Meteorological, and Satellite Observations. J. Geophys. Res. 2014, 119, 4521–4545. [Google Scholar] [CrossRef]
- Zhang, Y.; Kong, D.; Gan, R.; Chiew, F.H.S.; McVicar, T.R.; Zhang, Q.; Yang, Y. Coupled Estimation of 500 m and 8-Day Resolution Global Evapotranspiration and Gross Primary Production in 2002–2017. Remote Sens. Environ. 2019, 222, 165–182. [Google Scholar] [CrossRef]
- Senay, G.B.; Budde, M.E.; Verdin, J.P. Enhancing the Simplified Surface Energy Balance (SSEB) Approach for Estimating Landscape ET: Validation with the METRIC Model. Agric. Water Manag. 2011, 98, 606–618. [Google Scholar] [CrossRef]
- Hu, G.; Jia, L. Monitoring of Evapotranspiration in a Semi-Arid Inland River Basin by Combining Microwave and Optical Remote Sensing Observations. Remote Sens. 2015, 7, 3056–3087. [Google Scholar] [CrossRef] [Green Version]
- Ghilain, N.; Arboleda, A.; Gellens-Meulenberghs, F. Evapotranspiration Modelling at Large Scale Using Near-Real Time MSG SEVIRI Derived Data. Hydrol. Earth Syst. Sci. 2011, 15, 771–786. [Google Scholar] [CrossRef] [Green Version]
- Anderson, M.C.; Allen, R.G.; Morse, A.; Kustas, W.P. Use of Landsat Thermal Imagery in Monitoring Evapotranspiration and Managing Water Resources. Remote Sens. Environ. 2012, 122, 50–65. [Google Scholar] [CrossRef]
- Ma, N.; Szilagyi, J.; Zhang, Y.; Liu, W. Complementary-Relationship-Based Modeling of Terrestrial Evapotranspiration across China during 1982–2012: Validations and Spatiotemporal Analyses. J. Geophys. Res. Atmos. 2019, 124, 4326–4351. [Google Scholar] [CrossRef]
- Wu, B.; Yan, N.; Xiong, J.; Bastiaanssen, W.G.M.; Zhu, W.; Stein, A. Validation of ETWatch Using Field Measurements at Diverse Landscapes: A Case Study in Hai Basin of China. J. Hydrol. 2012, 436–437, 67–80. [Google Scholar] [CrossRef]
- Song, L.; Liu, S.; Kustas, W.P.; Nieto, H.; Sun, L.; Xu, Z.; Skaggs, T.H.; Yang, Y.; Ma, M.; Xu, T.; et al. Monitoring and Validating Spatially and Temporally Continuous Daily Evaporation and Transpiration at River Basin Scale. Remote Sens. Environ. 2018, 219, 72–88. [Google Scholar] [CrossRef]
- Li, Z.L.; Tang, R.; Wan, Z.; Bi, Y.; Zhou, C.; Tang, B.; Yan, G.; Zhang, X. A Review of Current Methodologies for Regional Evapotranspiration Estimation from Remotely Sensed Data. Sensors 2009, 9, 3801–3853. [Google Scholar] [CrossRef] [Green Version]
- Ershadi, A.; McCabe, M.F.; Evans, J.P.; Chaney, N.W.; Wood, E.F. Multi-Site Evaluation of Terrestrial Evaporation Models Using FLUXNET Data. Agric. For. Meteorol. 2014, 187, 46–61. [Google Scholar] [CrossRef]
- Yao, Y.; Liang, S.; Li, X.; Chen, J.; Wang, K.; Jia, K.; Cheng, J.; Jiang, B.; Fisher, J.B.; Mu, Q.; et al. A Satellite-Based Hybrid Algorithm to Determine the Priestley-Taylor Parameter for Global Terrestrial Latent Heat Flux Estimation across Multiple Biomes. Remote Sens. Environ. 2015, 165, 216–233. [Google Scholar] [CrossRef] [Green Version]
- Michel, D.; Jiménez, C.; Miralles, D.G.; Jung, M.; Hirschi, M.; Ershadi, A.; Martens, B.; Mccabe, M.F.; Fisher, J.B.; Mu, Q.; et al. The WACMOS-ET Project-Part 1: Tower-Scale Evaluation of Four Remote-Sensing-Based Evapotranspiration Algorithms. Hydrol. Earth Syst. Sci. 2016, 20, 803–822. [Google Scholar] [CrossRef] [Green Version]
- Allen, R.G.; Pereira, L.S.; Howell, T.A.; Jensen, M.E. Evapotranspiration Information Reporting: I. Factors Governing Measurement Accuracy. Agric. Water Manag. 2011, 98, 899–920. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Xu, Z.; Song, L.; Zhao, Q.; Ge, Y.; Xu, T.; Ma, Y.; Zhu, Z.; Jia, Z.; Zhang, F. Upscaling Evapotranspiration Measurements from Multi-Site to the Satellite Pixel Scale over Heterogeneous Land Surfaces. Agric. For. Meteorol. 2016, 230–231, 97–113. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, S.; Hu, X.; Wang, J.; Li, X.; Xu, Z.; Ma, Y.; Liu, R.; Xu, T.; Yang, X. Evaluating Spatial Heterogeneity of Land Surface Hydrothermal Conditions in the Heihe River Basin. Chin. Geogr. Sci. 2020, 30, 855–875. [Google Scholar] [CrossRef]
- Jia, Z.; Liu, S.; Xu, Z.; Chen, Y.; Zhu, M. Validation of Remotely Sensed Evapotranspiration over the Hai River Basin, China. J. Geophys. Res. Atmos. 2012, 117, 1–21. [Google Scholar] [CrossRef]
- Li, X.; Liu, S.; Li, H.; Ma, Y.; Wang, J.; Zhang, Y.; Xu, Z.; Xu, T.; Song, L.; Yang, X.; et al. Intercomparison of Six Upscaling Evapotranspiration Methods: From Site to the Satellite Pixel. J. Geophys. Res. Atmos. 2018, 123, 6777–6803. [Google Scholar] [CrossRef]
- Li, X.; Liu, S.; Yang, X.; Ma, Y.; He, X.; Xu, Z.; Xu, T.; Song, L.; Zhang, Y.; Hu, X.; et al. Upscaling Evapotranspiration from a Single-Site to Satellite Pixel Scale. Remote Sens. 2021, 13, 4072. [Google Scholar] [CrossRef]
- Xu, F.; Wang, W.; Wang, J.; Huang, C.; Qi, Y.; Li, Y.; Ren, Z. Aggregation of Area-Averaged Evapotranspiration over the Ejina Oasis Based on a Flux Matrix and Footprint Analysis. J. Hydrol. 2019, 575, 17–30. [Google Scholar] [CrossRef]
- Liu, S.; Xu, Z.; Song, L.; Zhang, Y.; Zhu, Z. A Framework for Validating Remotely Sensed Evapotranspiration. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 3485–3488. [Google Scholar]
- Vinukollu, R.K.; Wood, E.F.; Ferguson, C.R.; Fisher, J.B. Global Estimates of Evapotranspiration for Climate Studies Using Multi-Sensor Remote Sensing Data: Evaluation of Three Process-Based Approaches. Remote Sens. Environ. 2011, 115, 801–823. [Google Scholar] [CrossRef]
- Xiong, Y.J.; Zhao, S.H.; Tian, F.; Qiu, G.Y. An Evapotranspiration Product for Arid Regions Based on the Three-Temperature Model and Thermal Remote Sensing. J. Hydrol. 2015, 530, 392–404. [Google Scholar] [CrossRef]
- Miralles, D.G.; Jiménez, C.; Jung, M.; Michel, D.; Ershadi, A.; Mccabe, M.F.; Hirschi, M.; Martens, B.; Dolman, A.J.; Fisher, J.B.; et al. The WACMOS-ET Project-Part 2: Evaluation of Global Terrestrial Evaporation Data Sets. Hydrol. Earth Syst. Sci. 2016, 20, 823–842. [Google Scholar] [CrossRef] [Green Version]
- Jung, M.; Reichstein, M.; Margolis, H.A.; Cescatti, A.; Richardson, A.D.; Arain, M.A.; Arneth, A.; Bernhofer, C.; Bonal, D.; Chen, J.; et al. Global Patterns of Land-Atmosphere Fluxes of Carbon Dioxide, Latent Heat, and Sensible Heat Derived from Eddy Covariance, Satellite, and Meteorological Observations. J. Geophys. Res. Biogeosci. 2011, 116, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Bodesheim, P.; Jung, M.; Gans, F.; Mahecha, M.D.; Reichstein, M. Upscaled Diurnal Cycles of Land-Atmosphere Fluxes: A New Global Half-Hourly Data Product. Earth Syst. Sci. Data 2018, 10, 1327–1365. [Google Scholar] [CrossRef] [Green Version]
- Xu, T.; Guo, Z.; Liu, S.; He, X.; Meng, Y.; Xu, Z.; Xia, Y.; Xiao, J.; Zhang, Y.; Ma, Y.; et al. Evaluating Different Machine Learning Methods for Upscaling Evapotranspiration from Flux Towers to the Regional Scale. J. Geophys. Res. Atmos. 2018, 123, 8674–8690. [Google Scholar] [CrossRef]
- Jiménez, C.; Prigent, C.; Mueller, B.; Seneviratne, S.I.; McCabe, M.F.; Wood, E.F.; Rossow, W.B.; Balsamo, G.; Betts, A.K.; Dirmeyer, P.A.; et al. Global Intercomparison of 12 Land Surface Heat Flux Estimates. J. Geophys. Res. Atmos. 2011, 116, 1–27. [Google Scholar] [CrossRef]
- Xu, T.; Guo, Z.; Xia, Y.; Ferreira, V.G.; Liu, S.; Wang, K.; Yao, Y.; Zhang, X.; Zhao, C. Evaluation of Twelve Evapotranspiration Products from Machine Learning, Remote Sensing and Land Surface Models over Conterminous United States. J. Hydrol. 2019, 578, 2018–2019. [Google Scholar] [CrossRef]
- Long, D.; Longuevergne, L.; Scanlon, B.R. Uncertainty in Evapotranspiration from Land Surface Modeling, Remote Sensing, and GRACE Satellites. Water Resour. Res. 2014, 50, 1131–1151. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Li, X.; Xu, Z.; Che, T.; Xiao, Q.; Ma, M.; Liu, Q.; Jin, R.; Guo, J.; Wang, L.; et al. The Heihe Integrated Observatory Network: A Basin-Scale Land Surface Processes Observatory in China. Vadose Zone J. 2018, 17, 180072. [Google Scholar] [CrossRef]
- Xu, Z.; Liu, S.; Zhu, Z.; Zhou, J.; Shi, W.; Xu, T.; Yang, X.; Zhang, Y.; He, X. Exploring Evapotranspiration Changes in a Typical Endorheic Basin through the Integrated Observatory Network. Agric. For. Meteorol. 2020, 290, 108010. [Google Scholar] [CrossRef]
- Li, X.; Li, X.; Li, Z.; Ma, M.; Wang, J.; Xiao, Q.; Liu, Q.; Che, T.; Chen, E.; Yan, G.; et al. Watershed Allied Telemetry Experimental Research. J. Geophys. Res. Atmos. 2009, 114. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Cheng, G.; Liu, S.; Xiao, Q.; Ma, M.; Jin, R.; Che, T.; Liu, Q.; Wang, W.; Qi, Y.; et al. Heihe Watershed Allied Telemetry Experimental Research (HiWater) Scientific Objectives and Experimental Design. Bull. Am. Meteorol. Soc. 2013, 94, 1145–1160. [Google Scholar] [CrossRef]
- Ji, X.B.; Zhao, W.Z.; Kang, E.S.; Zhang, Z.H.; Jin, B.W.; Zhao, L.W. Carbon Dioxide Exchange in an Irrigated Agricultural Field within an Oasis, Northwest China. J. Appl. Meteorol. Climatol. 2011, 50, 2298–2308. [Google Scholar] [CrossRef]
- Xu, Z.; Liu, S.; Li, X.; Shi, S.; Wang, J.; Zhu, Z.; Xu, T.; Wang, W.; Ma, M. Intercomparison of Surface Energy Flux Measurement Systems Used during the HiWATER-MUSOEXE. J. Geophys. Res. Atmos. 2013, 118, 13140–13157. [Google Scholar] [CrossRef]
- Li, X.; Cheng, G.; Ge, Y.; Li, H.; Han, F.; Hu, X.; Tian, W.; Tian, Y.; Pan, X.; Nian, Y.; et al. Hydrological Cycle in the Heihe River Basin and Its Implication for Water Resource Management in Endorheic Basins. J. Geophys. Res. Atmos. 2018, 123, 890–914. [Google Scholar] [CrossRef]
- Zhong, B.; Ma, P.; Nie, A.H.; Yang, A.X.; Yao, Y.J.; Lü, W.B.; Zhang, H.; Liu, Q.H. Land Cover Mapping Using Time Series HJ-1/CCD Data. Sci. China Earth Sci. 2014, 57, 1790–1799. [Google Scholar] [CrossRef]
- Pan, X.; Li, X.; Shi, X.; Han, X.; Luo, L.; Wang, L. Dynamic Downscaling of Near-Surface Air Temperature at the Basin Scale Using WRF-a Case Study in the Heihe River Basin, China. Front. Earth Sci. 2012, 6, 314–323. [Google Scholar] [CrossRef]
- Xiu, D.; Karniadakis, G.E. Modeling Uncertainty in Flow Simulations via Generalized Polynomial Chaos. J. Comput. Phys. 2003, 187, 137–167. [Google Scholar] [CrossRef]
- Taylor, K.E. Summarizing Multiple Aspects of Model Performance in a Single Diagram. J. Geophys. Res. 2001, 106, 7183–7192. [Google Scholar] [CrossRef]
- Liu, J.; Chai, L.; Dong, J.; Zheng, D.; Wigneron, J.P.; Liu, S.; Zhou, J.; Xu, T.; Yang, S.; Song, Y.; et al. Uncertainty Analysis of Eleven Multisource Soil Moisture Products in the Third Pole Environment Based on the Three-Corned Hat Method. Remote Sens. Environ. 2021, 255, 112225. [Google Scholar] [CrossRef]
- Beyrich, F.; Leps, J.P.; Mauder, M.; Bange, J.; Foken, T.; Huneke, S.; Lohse, H.; Lüdi, A.; Meijninger, W.M.L.; Mironov, D.; et al. Area-Averaged Surface Fluxes over the Litfass Region Based on Eddy-Covariance Measurements. Bound.-Layer Meteorol. 2006, 121, 33–65. [Google Scholar] [CrossRef]
- Kewlani, G.; Iagnemma, K. A Multi-Element Generalized Polynomial Chaos Approach to Analysis of Mobile Robot Dynamics under Uncertainty. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 11–15 October 2009; pp. 1177–1182. [Google Scholar]
- Pereira, A.R. The Priestley-Taylor Parameter and the Decoupling Factor for Estimating Reference Evapotranspiration. Agric. For. Meteorol. 2004, 125, 305–313. [Google Scholar] [CrossRef]
- Di, S.C.; Li, Z.L.; Tang, R.; Wu, H.; Tang, B.H.; Lu, J. Integrating Two Layers of Soil Moisture Parameters into the MOD16 Algorithm to Improve Evapotranspiration Estimations. Int. J. Remote Sens. 2015, 36, 4953–4971. [Google Scholar] [CrossRef]
- Ershadi, A.; McCabe, M.F.; Evans, J.P.; Wood, E.F. Impact of Model Structure and Parameterization on Penman-Monteith Type Evaporation Models. J. Hydrol. 2015, 525, 521–535. [Google Scholar] [CrossRef] [Green Version]
- Bai, Y.; Li, X.; Liu, S.; Wang, P. Modelling Diurnal and Seasonal Hysteresis Phenomena of Canopy Conductance in an Oasis Forest Ecosystem. Agric. For. Meteorol. 2017, 246, 98–110. [Google Scholar] [CrossRef]
- Yang, Y.; Guan, H.; Long, D.; Liu, B.; Qin, G.; Qin, J.; Batelaan, O. Estimation of Surface Soil Moisture from Thermal Infrared Remote Sensing Using an Improved Trapezoid Method. Remote Sens. 2015, 7, 8250–8270. [Google Scholar] [CrossRef] [Green Version]
- Jung, M.; Reichstein, M.; Bondeau, A. Towards Global Empirical Upscaling of FLUXNET Eddy Covariance Observations: Validation of a Model Tree Ensemble Approach Using a Biosphere Model. Biogeosciences 2009, 6, 2001–2013. [Google Scholar] [CrossRef] [Green Version]
- Maurer, V.; Kalthoff, N.; Wieser, A.; Kohler, M.; Mauder, M.; Gantner, L. Observed Spatiotemporal Variability of Boundary-Layer Turbulence over Flat, Heterogeneous Terrain. Atmos. Chem. Phys. 2016, 16, 1377–1400. [Google Scholar] [CrossRef] [Green Version]
- Galindo, F.J.; Palacio, J. Estimating the instabilities of N correlated clocks. In Proceedings of the 31th Annual Precise Time and Time Interval Systems and Applications Meeting, Dana Point, CA, USA, 7–9 December 1999; pp. 285–296. [Google Scholar]













| Product Category | ET Products | Retrieval Method | Temporal Extent | Spatial Coverage | Temporal Resolution | Spatial Resolution | References |
|---|---|---|---|---|---|---|---|
| Surface Energy Balance | GLEAM | Priestley– Taylor | 1980–2021 | Global | daily | 0.25° | [6] |
| DTD | Two-source energy balance model | 2010–2016 (6–9) | HBR | daily | 1 km | [17] | |
| Vegetation Eco-Physiological Process | MOD16 | Penman– Monteith | 2000–2021 | Global | 8 days | 1 km/500 m | [5] |
| ETMonitor | Shuttleworth– Wallace | 2000–2020 | Global | daily | 1 km | [12] | |
| Integrated Method | GLASS-ET | Bayesian model averaging | 1983, 1993, 2003, 2010–2018 | Global | 8 days | 1 km | [9] |
| Region | Number/Matrix | Site | Landscape | Observation Instrument | Longitude (E) | Latitude (N) | Elevation (m) | Corresponding MODIS Pixel | Spatial Heterogeneity | Time Period of Data Used |
|---|---|---|---|---|---|---|---|---|---|---|
| Up- stream | 1 | Arou (AR) (LAS8) | Subalpine meadow | EC + AWS + LAS | 100.46 | 38.04 | 3033 | 2 × 1 | Homogeneity | January 2013–December 2016 |
| 2 | Guantan (GT) | Qinghai spruce | EC + AWS | 100.25 | 38.53 | 2835 | 2 × 1 | Homogeneity/ Moderate heterogeneity | January 2010–December 2011 | |
| 3 | Dashalong (DSL) | Marsh alpine meadow | EC + AWS | 98.94 | 38.84 | 3739 | 1 × 1 | Homogeneity | August 2013–December 2016 | |
| Mid- stream | 4 | Daman (DM) | Maize/orchard/village | EC + AWS + LAS | 100.37 | 38.85 | 1556 | 2 × 1 | Homogeneity/ Moderate heterogeneity | October 2012–December 2016 |
| 5 | Zhangye Wetland (WD) | Reed/water | EC + AWS | 100.44 | 38.97 | 1460 | 1 × 1 | Moderate heterogeneity | June 2012–December 2016 | |
| 6 | Bajitan Gobi (BJT) | Reaumuria desert | EC + AWS | 100.30 | 38.91 | 1562 | 1 × 1 | Homogeneity | May 2012–April 2015 | |
| 7 | Huazhaizi Desert steppe (HZZ) | Kalidium foliatum desert | EC + AWS | 100.31 | 38.76 | 1731 | 2 × 1 | Homogeneity | June 2012–December 2016 | |
| 8 | Yingke (YK) | Maize | EC + AWS | 100.41 | 38.85 | 1519 | 1 × 1 | Homogeneity/ Moderate heterogeneity | January 2010–December 2011 | |
| 9 | Shenshawo (SSW) | Sandy desert | EC + AWS | 100.49 | 38.78 | 1594 | 1 × 1 | Homogeneity | June 2012– April 2015 | |
| 10 | Linze (LZ) | Maize | EC + AWS | 100.14 | 39.32 | 1252 | 1 × 1 | Homogeneity/ Moderate heterogeneity | January 2013–December 2014 | |
| Flux observation matrix (LAS1-LAS4) | Maize/orchard/village | EC + AWS + LAS(1-4) | 100.34–100.38 | 38.84–38.88 | 1556 | Three 3 × 1 + one 2 × 1 | Homogeneity/ Moderate heterogeneity | June 2012–September 2012 | ||
| Down- stream | 11 | Sidaoqiao (SDQ) | Tamarix | EC +AWS LAS | 101.13 | 42.00 | 873 | 2 × 1 | Highly heterogeneity | January 2016–December 2016 |
| 12 | Populus euphratica (PE) | Populus euphratica | EC + AWS | 101.12 | 41.99 | 876 | 1 × 1 | Moderate heterogeneity/Highly heterogeneity | July 2013–April 2016 | |
| 13 | Mixed forest (MF) | Populus euphratica and Tamarix | EC + AWS | 101.13 | 41.99 | 874 | 1 × 1 | Highly heterogeneity | July 2013–December 2016 | |
| 14 | Barren land (BL) | Bare land | EC + AWS | 101.13 | 41.99 | 878 | 1 × 1 | Homogeneity | July 2013– March 2016 | |
| 15 | Desert (DS) | Reaumuria desert | EC + AWS | 100.98 | 42.11 | 1054 | 1 × 1 | Homogeneity | April 2015–December 2016 | |
| Flux observation matrix (LAS5-LAS7) | Populus euphratica/Tamarix/Croplands/Bare land | EC + AWS + LAS | 101.11–101.15 | 41.98–42.00 | 873 | Two 2 × 2 + one 2 × 1 | Moderate heterogeneity/Highly heterogeneity | January 2014–December 2015 |
| MAPE | Vegetation Growing Season (June to September) | The Whole Year | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Typical Underlying Surface | GLEAM | DTD | MOD16 | ETMonitor | GLASS | GLEAM | MOD16 | ETMonitor | GLASS |
| Grassland | 16.35 | 39.46 | 21.39 | 20.28 | 21.86 | 19.26 | 25.35 | 22.54 | 22.76 |
| Qinghai spruce | 14.95 | 28.12 | 29.63 | 23.74 | 26.04 | 28.72 | 28.08 | 22.03 | 29.23 |
| Cropland | 44.09 | 18.8 | 34.25 | 15.23 | 23.09 | 41.56 | 32.88 | 20.13 | 28.78 |
| Wetland | 50.13 | 23.61 | 44.85 | 19.33 | 37.38 | 42.24 | 41.8 | 22.54 | 35.68 |
| Desert | 28.37 | 25.76 | -- | 26.98 | 32.46 | 20.58 | -- | 29.27 | 33.76 |
| Riparian forest | 75.33 | 27.01 | 71.07 | 37.53 | 55.48 | 77.15 | 70.01 | 39.86 | 58.42 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Liu, S.; Song, L.; Li, X.; Jia, Z.; Xu, T.; Xu, Z.; Ma, Y.; Zhou, J.; Yang, X.; et al. Integrated Validation of Coarse Remotely Sensed Evapotranspiration Products over Heterogeneous Land Surfaces. Remote Sens. 2022, 14, 3467. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14143467
Zhang Y, Liu S, Song L, Li X, Jia Z, Xu T, Xu Z, Ma Y, Zhou J, Yang X, et al. Integrated Validation of Coarse Remotely Sensed Evapotranspiration Products over Heterogeneous Land Surfaces. Remote Sensing. 2022; 14(14):3467. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14143467
Chicago/Turabian StyleZhang, Yuan, Shaomin Liu, Lisheng Song, Xiang Li, Zhenzhen Jia, Tongren Xu, Ziwei Xu, Yanfei Ma, Ji Zhou, Xiaofan Yang, and et al. 2022. "Integrated Validation of Coarse Remotely Sensed Evapotranspiration Products over Heterogeneous Land Surfaces" Remote Sensing 14, no. 14: 3467. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14143467