
UAV Oblique Imagery with an Adaptive Micro-Terrain Model for Estimation of Leaf Area Index and Height of Maize Canopy from 3D Point Clouds

 ,
,  , , ,
, , ,
Abstract
:1. Introduction
Literature Review and Background Study

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Case Study | Estimating Parameter | Method and Core Findings (R2, RMSE) | Ref. |
|---|---|---|---|---|
| RGB camera | Maize | LAI, height | 3D point cloud from photogrammetry with a 3D voxel method, LAI estimation by nadir photography R2 = 0.56, LAI estimation by oblique photography R2 = 0.67, height estimation R2 > 0.9. | [35] |
| RGB camera | Maize | LAI, canopy height, green-canopy cover | Top-of-canopy RGB images with a ‘vertical, leaf area distribution factor’ (VLADF), LAI R2 = 0.6 and RMSE = 0.73. | [63] |
| RGB camera | Soybean | LAI | RGB photography, integrating the effects of viewing geometry and gap fraction theory. LAI estimation R2 = 0.92, RMSE = 0.42 compared with gap fraction-based handheld device, R2 = 0.89, RMSE = 0.41 compared with destructive LAI measurements. Proved to be a reasonable alternative to handheld and destructive LAI measurements. | [64] |
| RGB camera, Multispectral camera | Barley | LAI, dry biomass | Dry biomass and LAI were modeled using random forest regression models with good accuracies (DM: R2 = 0.62, nRMSEp = 14.9%, LAI: R2 = 0.92, nRMSEp = 7.1%). Important variables for prediction included normalized reflectance, vegetation indices, texture and plant height. | [65] |
| RGB camera, Multispectral camera | Sorghum | LAI, biomass, plant height | Image-based estimation with regression model. LAI estimation R2 = 0.92, biomass estimation R2 = 0.91, plant height estimation RMSE = 9.88 cm. | [66] |
| Multispectral camera | Vineyard | LAI, height canopy thickness, leaf density distribution | 3D point cloud from photogrammetry. Correlation between manual measurement of LAI and estimated LAI using multivariate linear regression resulted in R2 = 0.82. | [23] |
| Multispectral camera | Potato | LAI, LCC | Multispectral 2D orthophoto with PROSAIL model. LAI RMSE = 0.65, LCC RMSE = 17.29, huge improvement was obtained by multi-angular sampling configurations rather than by nadir position. | [56] |
| Multispectral camera | Maize | LAI, Chlorophyll | R2 increased from 0.2 to 0.77 with incorporation of UAV-based LAI estimation in the empirical model for chlorophyll. | [67] |
| Multispectral camera | Maize | Yield | The best model for yield prediction was found using maize plant development stage reproductive 2 (R2) for both maize grain yield and ear weight (R2 = 0.73, R2 = 0.49, root mean square error of validation (RMSEV) values RMSEV = 2.07, RMSEV = 3.41 tons/ha using partial least squares regression (PLSR) validation models). | [8] |
| LiDAR | Maize | LAI | UAV-based LiDAR mapping, 3D point cloud with voxel-based method. LAI estimation NRMSE for the upper, middle, and lower layers were 10.8%, 12.4%, 42.8%, for 27,495 plants/ha, respectively. Different correlations were developed among varying parameters including voxel size, UAV route, point density, and plant densities. | [1] |
| LiDAR | Blueberries | Height, width, crown size, shape, bush volume | 3D point cloud with bush shape analysis. One-dimensional traits (height, width, and crown size) had high correlations (R2 = 0.88–0.95), bush volume showed relatively lower correlations (R2 = 0.78–0.85). | [14] |
| LiDAR | Forest | LAI, LAD | Counting method for multi-return LiDAR point clouds. Method is suitable for estimating foliage profiles in a complex tropical forest. | [68] |
| LiDAR | Dense tropical forest | LAI, LAD | LiDAR point cloud with voxel-based approaches. Authors recommend voxels with a small grain size (<10 m) only when pulse density is greater than 15 pulses m−2. | [69] |
| LiDAR | Coast live oak Queen palm | LAI | Two different methods: penetration metrics and allometric method. LIDAR penetration method resulted in the highest R2 = 0.82. | [70] |
| Near-infrared laser | Cotton | LAI | 3D point cloud-based estimation of LAI by height of cotton crop. LAI separation in plants by height. Irrigation, cotton cultivar, and stages of growth in cotton impacted LAI by height. 3D point cloud-based estimation may supplement measures of spatial factors and radiation capture. | [71] |
| Satellite imagery | Dwarf shrub, Graminoid, Moss, Lichen | LAI | Quantification of NDVI and LAI using satellite imagery at different phenological stages. Results showed that LAI supported variation in NDVI with R2 = 0.4 to 0.9. | [72] |
| RGB camera and Satellite imagery | Forest, plantations, croplands | LAI | Global estimation of LAI using NASA SeaWIFS satellite data and more than 1000 published estimation models. R2 = 0.87 between LAI from database and mean LAI estimated using NASA SeaWIFS satellite dataset repository. | [73] |
| RGB camera and Satellite imagery | Mangrove | LAI | Comparison between UAV-based LAI estimation and WorldView-2 LAI raster. LAI was estimated using two different methods (i.e., UAV based LAI estimation and satellite WorldView-2 based LAI estimation). On an average, UAV based LAI estimation was relatively more accurate as compared to WorldView-2 due to high resolution. | [52] |
2. Materials and Methods
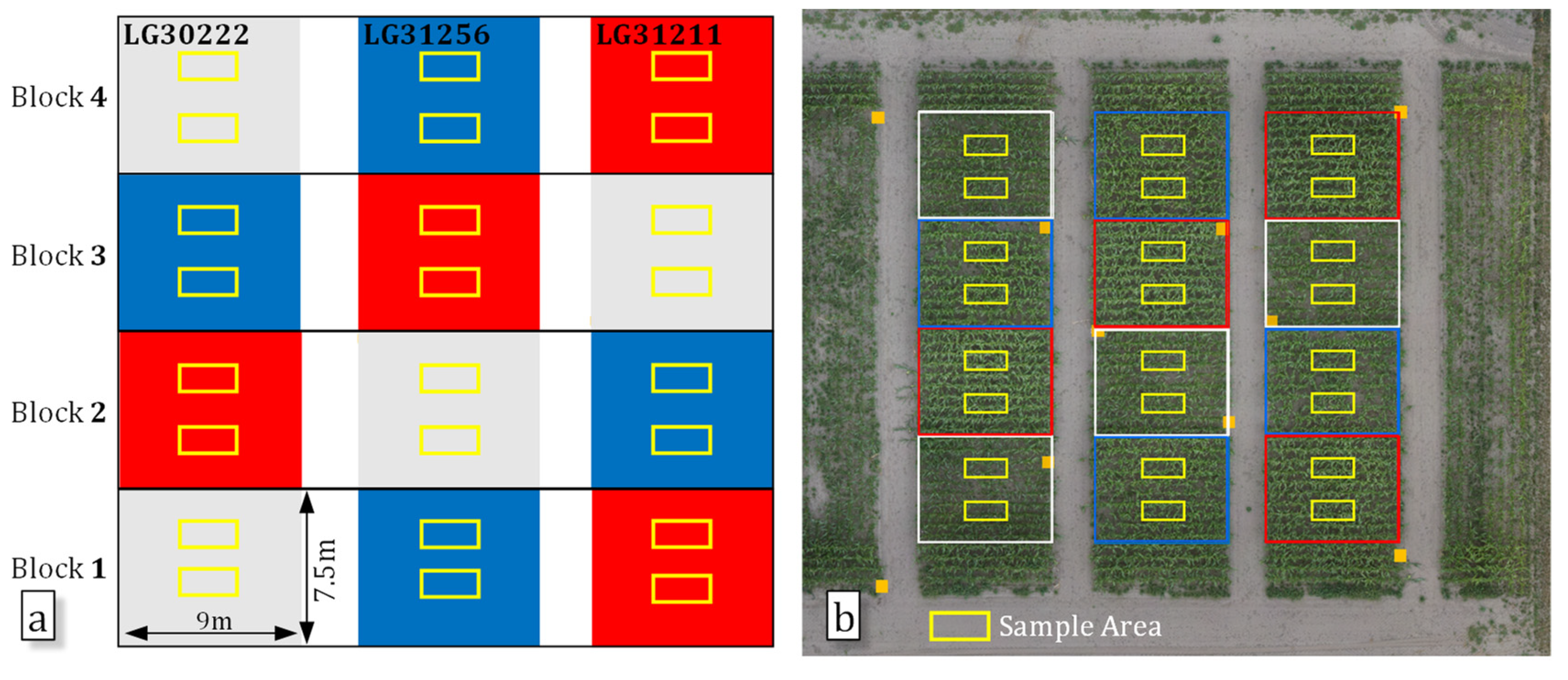
2.1. Field Preparation
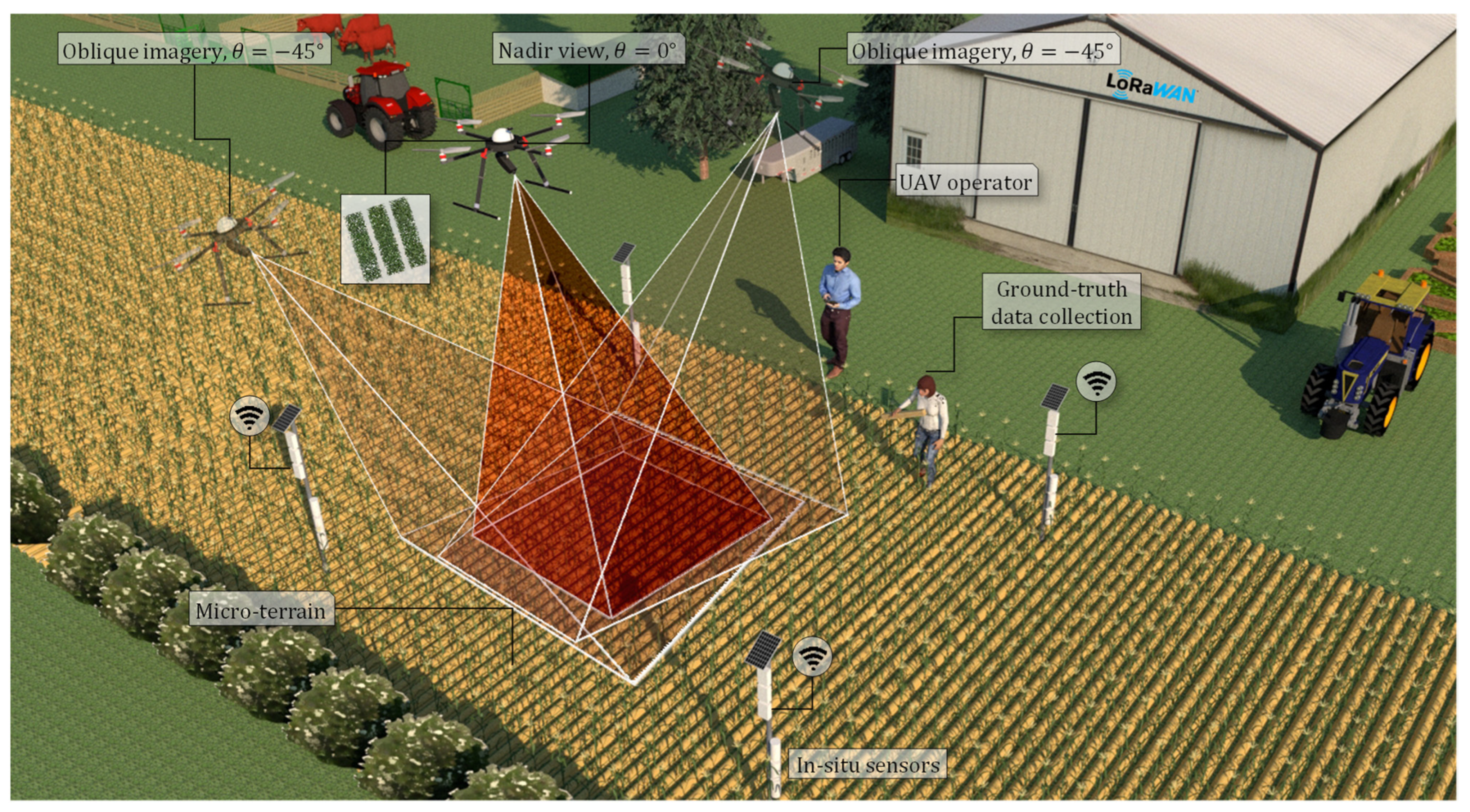
2.2. UAV-Image Acquisition and Manual Measurements
2.3. Ground-Truth Data Collection
2.4. Experimental Design and Statistical Analysis
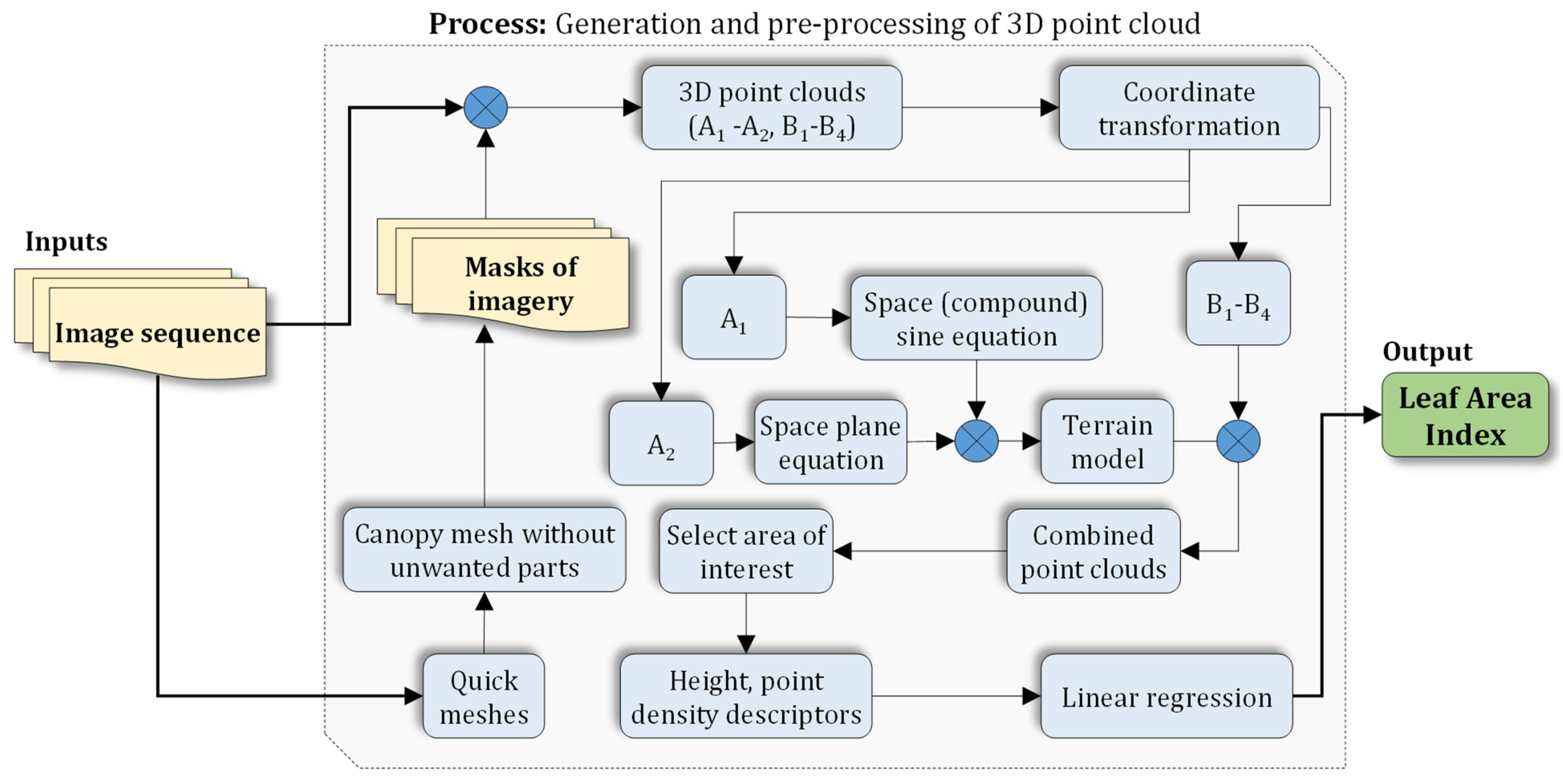
2.5. Generation and Pre-Processing of 3D Point Cloud
2.6. Derivation of Terrain Model
2.7. Canopy Height Estimation
2.8. Leaf Area Index Estimation
3. Results and Discussion
3.1. Reconstructed 3D Point Clouds
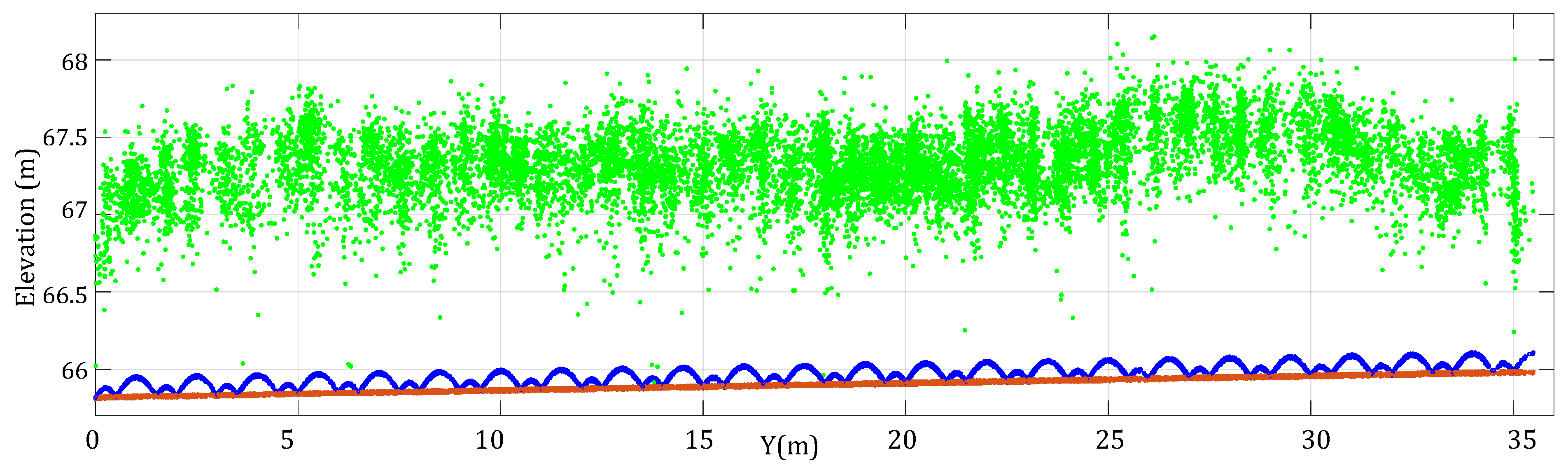
3.2. Terrain Models
3.3. Height Estimation
3.4. LAI Estimation
4. Conclusions
- Before the estimation, the reference ground model with micro-terrain was derived and then simulated with a curved surface to be used to identify the canopy features. Including the micro-terrain in the ground, the model was found suitable for extracting the parameters of maize during the growing season in more detail.
- Except for the datasets corresponding to LG30256-CH95 (R2 = 0.46) and LG31211-CH95 (R2 = 0.67), the height estimation of maize achieved a relatively high correlation (R2 = 0.89, 0.86, 0.78) for cultivar datasets LG30222-CH90, LG31256-CH90, and LG31211-CH90 between the estimated and actual data, indicating effective modeling by point cloud data. Additionally, a general model for height estimation was derived for all three cultivar datasets with an R2 of 0.80 in CH90. This could be beneficial to breeding experiments.
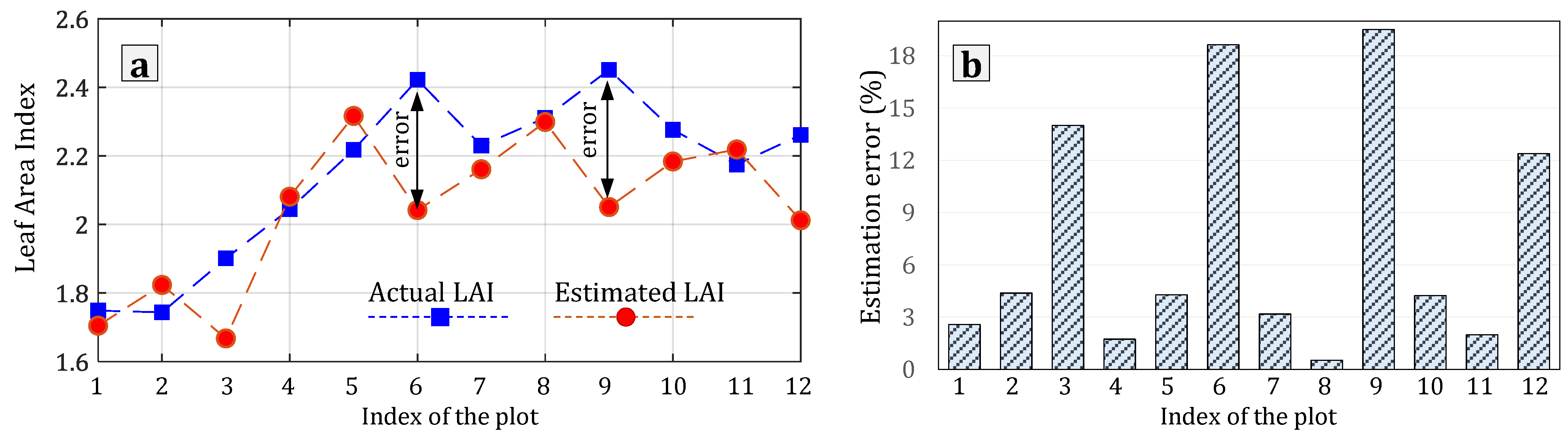
- The correlation of LAI estimation was less desirable (R2 = 0.48) due to lower point density values caused by the missing maize plants in the sample areas (i.e., lodging, failure of seed germination), leading to a different and uneven number of maize in the areas and thus inaccurate estimation of canopy density and LAI. This should also be investigated further.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lei, L.; Qiu, C.; Li, Z.; Han, D.; Han, L.; Zhu, Y.; Wu, J.; Xu, B.; Feng, H.; Yang, H. Effect of leaf occlusion on leaf area index inversion of maize using UAV–LiDAR data. Remote Sens. 2019, 11, 1067. [Google Scholar] [CrossRef] [Green Version]
- Rodrigo-Comino, J. Five decades of soil erosion research in “terroir”. The State-of-the-Art. Earth-Sci. Rev. 2018, 179, 436–447. [Google Scholar] [CrossRef]
- Chen, S.; Wang, J.; Zhang, T.; Hu, Z.; Zhou, G. Warming and straw application increased soil respiration during the different growing seasons by changing crop biomass and leaf area index in a winter wheat-soybean rotation cropland. Geoderma 2021, 391, 114985. [Google Scholar] [CrossRef]
- Anwar, S.A. On the contribution of dynamic leaf area index in simulating the African climate using a regional climate model (RegCM4). Theor. Appl. Climatol. 2021, 143, 119–129. [Google Scholar] [CrossRef]
- Mourad, R.; Jaafar, H.; Anderson, M.; Gao, F. Assessment of Leaf Area Index Models Using Harmonized Landsat and Sentinel-2 Surface Reflectance Data over a Semi-Arid Irrigated Landscape. Remote Sens. 2020, 12, 3121. [Google Scholar] [CrossRef]
- Paul, M.; Rajib, A.; Negahban-Azar, M.; Shirmohammadi, A.; Srivastava, P. Improved agricultural Water management in data-scarce semi-arid watersheds: Value of integrating remotely sensed leaf area index in hydrological modeling. Sci. Total Environ. 2021, 791, 148177. [Google Scholar] [CrossRef]
- Zhou, L.; Gu, X.; Cheng, S.; Yang, G.; Shu, M.; Sun, Q. Analysis of plant height changes of lodged maize using UAV-LiDAR data. Agriculture 2020, 10, 146. [Google Scholar] [CrossRef]
- Herrmann, I.; Bdolach, E.; Montekyo, Y.; Rachmilevitch, S.; Townsend, P.A.; Karnieli, A. Assessment of maize yield and phenology by drone-mounted superspectral camera. Precis. Agric. 2020, 21, 51–76. [Google Scholar] [CrossRef]
- Nguy-Robertson, A.L.; Peng, Y.; Gitelson, A.A.; Arkebauer, T.J.; Pimstein, A.; Herrmann, I.; Karnieli, A.; Rundquist, D.C.; Bonfil, D.J. Estimating green LAI in four crops: Potential of determining optimal spectral bands for a universal algorithm. Agric. For. Meteorol. 2014, 192, 140–148. [Google Scholar] [CrossRef]
- Monsi, M. Uber den Lichtfaktor in den Pflanzen-gesellschaften und seine Bedeutung fur die Stoffproduktion [On the light factor in plant societies and ist significance for substance production]. Jap. Journ. Bot. 1953, 14, 22–52. [Google Scholar]
- Yan, G.; Hu, R.; Luo, J.; Weiss, M.; Jiang, H.; Mu, X.; Xie, D.; Zhang, W. Review of indirect optical measurements of leaf area index: Recent advances, challenges, and perspectives. Agric. For. Meteorol. 2019, 265, 390–411. [Google Scholar] [CrossRef]
- Kerkech, M.; Hafiane, A.; Canals, R. Deep leaning approach with colorimetric spaces and vegetation indices for vine diseases detection in UAV images. Comput. Electron. Agric. 2018, 155, 237–243. [Google Scholar] [CrossRef]
- Deery, D.M.; Rebetzke, G.J.; Jimenez-Berni, J.A.; Condon, A.G.; Smith, D.J.; Bechaz, K.M.; Bovill, W.D. Ground-based LiDAR improves phenotypic repeatability of above-ground biomass and crop growth rate in wheat. Plant Phenomics 2020, 2020, 8329798. [Google Scholar] [CrossRef] [PubMed]
- Jiang, Y.; Li, C.; Takeda, F.; Kramer, E.A.; Ashrafi, H.; Hunter, J. 3D point cloud data to quantitatively characterize size and shape of shrub crops. Hortic. Res. 2019, 6, 43. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Ren, Y.; Yin, Z.Y.; Lin, Z.; Zheng, D. Spatial and temporal variation patterns of reference evapotranspiration across the Qinghai-Tibetan Plateau during 1971–2004. J. Geophys. Res. Atmos. 2009, 114. [Google Scholar] [CrossRef]
- Hardin, P.J.; Jensen, R.R. Small-Scale Unmanned Aerial Vehicles in Environmental Remote Sensing: Challenges and Opportunities. GIScience Remote Sens. 2011, 48, 99–111. [Google Scholar] [CrossRef]
- Knoth, C.; Klein, B.; Prinz, T.; Kleinebecker, T. Unmanned aerial vehicles as innovative remote sensing platforms for high-resolution infrared imagery to support restoration monitoring in cut-over bogs. Appl. Veg. Sci. 2013, 16, 509–517. [Google Scholar] [CrossRef]
- Linchant, J.; Lisein, J.; Semeki, J.; Lejeune, P.; Vermeulen, C. Are unmanned aircraft systems (UASs) the future of wildlife monitoring? A review of accomplishments and challenges. Mamm. Rev. 2015, 45, 239–252. [Google Scholar] [CrossRef]
- Whitehead, K.; Hugenholtz, C.H.; Myshak, S.; Brown, O.; LeClair, A.; Tamminga, A.; Barchyn, T.E.; Moorman, B.; Eaton, B. Remote sensing of the environment with small unmanned aircraft systems (UASs), part 2: Scientific and commercial applications. J. Unmanned Veh. Syst. 2014, 2, 86–102. [Google Scholar] [CrossRef] [Green Version]
- Shahbazi, M.; Théau, J.; Ménard, P. Recent applications of unmanned aerial imagery in natural resource management. GIScience Remote Sens. 2014, 51, 339–365. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.; Turner, D. Development of a UAV-LiDAR System with Application to Forest Inventory. Remote Sens. 2012, 4, 1519–1543. [Google Scholar] [CrossRef] [Green Version]
- Shamshiri, R.R. Fundamental Research on Unmanned Aerial Vehicles to Support Precision Agriculture in Oil Palm Plantations; Hameed, I.A., Ed.; IntechOpen: Rijeka, Croatia, 2019; Chapter 6; pp. 91–116. ISBN 978-1-78984-934-9. [Google Scholar]
- Comba, L.; Biglia, A.; Ricauda Aimonino, D.; Tortia, C.; Mania, E.; Guidoni, S.; Gay, P. Leaf Area Index evaluation in vineyards using 3D point clouds from UAV imagery. Precis. Agric. 2020, 21, 881–896. [Google Scholar] [CrossRef] [Green Version]
- Garcerá, C.; Doruchowski, G.; Chueca, P. Harmonization of plant protection products dose expression and dose adjustment for high growing 3D crops: A review. Crop Prot. 2021, 140, 105417. [Google Scholar] [CrossRef]
- Bates, J.S.; Montzka, C.; Schmidt, M.; Jonard, F. Estimating Canopy Density Parameters Time-Series for Winter Wheat Using UAS Mounted LiDAR. Remote Sens. 2021, 13, 710. [Google Scholar] [CrossRef]
- Vergara-Díaz, O.; Zaman-Allah, M.A.; Masuka, B.; Hornero, A.; Zarco-Tejada, P.; Prasanna, B.M.; Cairns, J.E.; Araus, J.L. A Novel Remote Sensing Approach for Prediction of Maize Yield Under Different Conditions of Nitrogen Fertilization. Front. Plant Sci. 2016, 7, 666. [Google Scholar] [CrossRef] [Green Version]
- Guo, W.; Carroll, M.E.; Singh, A.; Swetnam, T.L.; Merchant, N.; Sarkar, S.; Singh, A.K.; Ganapathysubramanian, B. UAS-Based Plant Phenotyping for Research and Breeding Applications. Plant Phenomics 2021, 2021, 9840192. [Google Scholar] [CrossRef]
- Han, L.; Yang, G.; Yang, H.; Xu, B.; Li, Z.; Yang, X. Clustering field-based maize phenotyping of plant-height growth and canopy spectral dynamics using a UAV remote-sensing approach. Front. Plant Sci. 2018, 9, 1638. [Google Scholar] [CrossRef] [Green Version]
- Herrero-Huerta, M.; González-Aguilera, D.; Rodriguez-Gonzalvez, P.; Hernández-López, D. Vineyard yield estimation by automatic 3D bunch modelling in field conditions. Comput. Electron. Agric. 2015, 110, 17–26. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; de Castro, A.I.; Peña, J.M.; Jiménez-Brenes, F.M.; Arquero, O.; Lovera, M.; López-Granados, F. Mapping the 3D structure of almond trees using UAV acquired photogrammetric point clouds and object-based image analysis. Biosyst. Eng. 2018, 176, 172–184. [Google Scholar] [CrossRef]
- Jiménez-Brenes, F.M.; López-Granados, F.; de Castro, A.I.; Torres-Sánchez, J.; Serrano, N.; Peña, J.M. Quantifying pruning impacts on olive tree architecture and annual canopy growth by using UAV-based 3D modelling. Plant Methods 2017, 13, 55. [Google Scholar] [CrossRef] [Green Version]
- Mathews, A.; Jensen, J. Visualizing and Quantifying Vineyard Canopy LAI Using an Unmanned Aerial Vehicle (UAV) Collected High Density Structure from Motion Point Cloud. Remote Sens. 2013, 5, 2164–2183. [Google Scholar] [CrossRef] [Green Version]
- Hobart, M.; Pflanz, M.; Weltzien, C.; Schirrmann, M. Growth Height Determination of Tree Walls for Precise Monitoring in Apple Fruit Production Using UAV Photogrammetry. Remote Sens. 2020, 12, 1656. [Google Scholar] [CrossRef]
- Guo, Y.; Chen, S.; Wu, Z.; Wang, S.; Robin Bryant, C.; Senthilnath, J.; Cunha, M.; Fu, Y.H. Integrating Spectral and Textural Information for Monitoring the Growth of Pear Trees Using Optical Images from the UAV Platform. Remote Sens. 2021, 13, 1795. [Google Scholar] [CrossRef]
- Che, Y.; Wang, Q.; Xie, Z.; Zhou, L.; Li, S.; Hui, F.; Wang, X.; Li, B.; Ma, Y. Estimation of maize plant height and leaf area index dynamics using an unmanned aerial vehicle with oblique and nadir photography. Ann. Bot. 2020, 126, 765–773. [Google Scholar] [CrossRef]
- Li, B.; Xu, X.; Zhang, L.; Han, J.; Bian, C.; Li, G.; Liu, J.; Jin, L. Above-ground biomass estimation and yield prediction in potato by using UAV-based RGB and hyperspectral imaging. ISPRS J. Photogramm. Remote Sens. 2020, 162, 161–172. [Google Scholar] [CrossRef]
- Cucchiaro, S.; Fallu, D.J.; Zhang, H.; Walsh, K.; Van Oost, K.; Brown, A.G.; Tarolli, P. Multiplatform-SfM and TLS data fusion for monitoring agricultural terraces in complex topographic and landcover conditions. Remote Sens. 2020, 12, 1946. [Google Scholar] [CrossRef]
- Nesbit, P.R.; Hugenholtz, C.H. Enhancing UAV-SfM 3D model accuracy in high-relief landscapes by incorporating oblique images. Remote Sens. 2019, 11, 239. [Google Scholar] [CrossRef] [Green Version]
- Volpato, L.; Pinto, F.; González-Pérez, L.; Thompson, I.G.; Borém, A.; Reynolds, M.; Gérard, B.; Molero, G.; Rodrigues, F.A., Jr. High throughput field phenotyping for plant height using UAV-based RGB imagery in wheat breeding lines: Feasibility and validation. Front. Plant Sci. 2021, 12, 185. [Google Scholar] [CrossRef]
- Duan, B.; Liu, Y.; Gong, Y.; Peng, Y.; Wu, X.; Zhu, R.; Fang, S. Remote estimation of rice LAI based on Fourier spectrum texture from UAV image. Plant Methods 2019, 15, 124. [Google Scholar] [CrossRef] [Green Version]
- Lin, C.-W.; Ding, Q.; Tu, W.-H.; Huang, J.-H.; Liu, J.-F. Fourier dense network to conduct plant classification using UAV-based optical images. IEEE Access 2019, 7, 17736–17749. [Google Scholar] [CrossRef]
- Zheng, Q.; Huang, W.; Ye, H.; Dong, Y.; Shi, Y.; Chen, S. Using continous wavelet analysis for monitoring wheat yellow rust in different infestation stages based on unmanned aerial vehicle hyperspectral images. Appl. Opt. 2020, 59, 8003–8013. [Google Scholar] [CrossRef] [PubMed]
- Hasan, M.M.; Chopin, J.P.; Laga, H.; Miklavcic, S.J. Detection and analysis of wheat spikes using Convolutional Neural Networks. Plant Methods 2018, 14, 100. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yamaguchi, T.; Tanaka, Y.; Imachi, Y.; Yamashita, M.; Katsura, K. Feasibility of Combining Deep Learning and RGB Images Obtained by Unmanned Aerial Vehicle for Leaf Area Index Estimation in Rice. Remote Sens. 2021, 13, 84. [Google Scholar] [CrossRef]
- Li, Y.; Wen, W.; Guo, X.; Yu, Z.; Gu, S.; Yan, H.; Zhao, C. High-throughput phenotyping analysis of maize at the seedling stage using end-to-end segmentation network. PLoS ONE 2021, 16, e0241528. [Google Scholar] [CrossRef] [PubMed]
- Dhakal, M.; Locke, M.A.; Huang, Y.; Reddy, K.; Moore, M.T.; Krutz, J. Estimation of Cotton and Sorghum Crop Density and Cover at Early Vegetative Stages Using Unmanned Aerial Vehicle Imagery. In Proceedings of the AGU Fall Meeting Abstracts, online, 1–17 December 2020; Volume 2020, p. GC023-0005. [Google Scholar]
- Maimaitiyiming, M.; Sagan, V.; Sidike, P.; Kwasniewski, M.T. Dual activation function-based Extreme Learning Machine (ELM) for estimating grapevine berry yield and quality. Remote Sens. 2019, 11, 740. [Google Scholar] [CrossRef] [Green Version]
- Madec, S.; Baret, F.; De Solan, B.; Thomas, S.; Dutartre, D.; Jezequel, S.; Hemmerlé, M.; Colombeau, G.; Comar, A. High-throughput phenotyping of plant height: Comparing unmanned aerial vehicles and ground LiDAR estimates. Front. Plant Sci. 2017, 8, 2002. [Google Scholar] [CrossRef] [Green Version]
- ten Harkel, J.; Bartholomeus, H.; Kooistra, L. Biomass and crop height estimation of different crops using UAV-based LiDAR. Remote Sens. 2020, 12, 17. [Google Scholar] [CrossRef] [Green Version]
- Christiansen, M.P.; Laursen, M.S.; Jørgensen, R.N.; Skovsen, S.; Gislum, R. Designing and Testing a UAV Mapping System for Agricultural Field Surveying. Sensors 2017, 17, 2703. [Google Scholar] [CrossRef] [Green Version]
- Jay, S.; Rabatel, G.; Hadoux, X.; Moura, D.; Gorretta, N. In-field crop row phenotyping from 3D modeling performed using Structure from Motion. Comput. Electron. Agric. 2015, 110, 70–77. [Google Scholar] [CrossRef] [Green Version]
- Tian, J.; Wang, L.; Li, X.; Gong, H.; Shi, C.; Zhong, R.; Liu, X. Comparison of UAV and WorldView-2 imagery for mapping leaf area index of mangrove forest. Int. J. Appl. Earth Obs. Geoinf. 2017, 61, 22–31. [Google Scholar] [CrossRef]
- Córcoles, J.I.; Ortega, J.F.; Hernández, D.; Moreno, M.A. Estimation of leaf area index in onion (Allium cepa L.) using an unmanned aerial vehicle. Biosyst. Eng. 2013, 115, 31–42. [Google Scholar] [CrossRef]
- Lendzioch, T.; Langhammer, J.; Jenicek, M. Estimating snow depth and leaf area index based on UAV digital photogrammetry. Sensors 2019, 19, 1027. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sha, Z.; Wang, Y.; Bai, Y.; Zhao, Y.; Jin, H.; Na, Y.; Meng, X. Comparison of leaf area index inversion for grassland vegetation through remotely sensed spectra by unmanned aerial vehicle and field-based spectroradiometer. J. Plant Ecol. 2018, 12, 395–408. [Google Scholar] [CrossRef] [Green Version]
- Roosjen, P.P.J.; Brede, B.; Suomalainen, J.M.; Bartholomeus, H.M.; Kooistra, L.; Clevers, J.G.P.W. Improved estimation of leaf area index and leaf chlorophyll content of a potato crop using multi-angle spectral data—Potential of unmanned aerial vehicle imagery. Int. J. Appl. Earth Obs. Geoinf. 2018, 66, 14–26. [Google Scholar] [CrossRef]
- Lin, Y.; Jiang, M.; Yao, Y.; Zhang, L.; Lin, J. Use of UAV oblique imaging for the detection of individual trees in residential environments. Urban For. Urban Green. 2015, 14, 404–412. [Google Scholar] [CrossRef]
- Atkins, J.W.; Stovall, A.E.L.; Yang, X. Mapping temperate forest phenology using tower, UAV, and ground-based sensors. Drones 2020, 4, 56. [Google Scholar] [CrossRef]
- Lin, L.; Yu, K.; Yao, X.; Deng, Y.; Hao, Z.; Chen, Y.; Wu, N.; Liu, J. UAV Based Estimation of Forest Leaf Area Index (LAI) through Oblique Photogrammetry. Remote Sens. 2021, 13, 803. [Google Scholar] [CrossRef]
- Li, M.; Shamshiri, R.R.; Schirrmann, M.; Weltzien, C. Impact of Camera Viewing Angle for Estimating Leaf Parameters of Wheat Plants from 3D Point Clouds. Agriculture 2021, 11, 563. [Google Scholar] [CrossRef]
- Hämmerle, M.; Höfle, B. Mobile low-cost 3D camera maize crop height measurements under field conditions. Precis. Agric. 2017, 4, 630–647. [Google Scholar] [CrossRef]
- Chu, T.; Starek, M.J.; Brewer, M.J.; Murray, S.C.; Pruter, L.S. Assessing lodging severity over an experimental maize (Zea mays L.) field using UAS images. Remote Sens. 2017, 9, 923. [Google Scholar] [CrossRef] [Green Version]
- Raj, R.; Walker, J.P.; Pingale, R.; Nandan, R.; Naik, B.; Jagarlapudi, A. Leaf area index estimation using top-of-canopy airborne RGB images. Int. J. Appl. Earth Obs. Geoinf. 2021, 96, 102282. [Google Scholar] [CrossRef]
- Roth, L.; Aasen, H.; Walter, A.; Liebisch, F. Extracting leaf area index using viewing geometry effects—A new perspective on high-resolution unmanned aerial system photography. ISPRS J. Photogramm. Remote Sens. 2018, 141, 161–175. [Google Scholar] [CrossRef]
- Wengert, M.; Piepho, H.-P.; Astor, T.; Graß, R.; Wijesingha, J.; Wachendorf, M. Assessing Spatial Variability of Barley Whole Crop Biomass Yield and Leaf Area Index in Silvoarable Agroforestry Systems Using UAV-Borne Remote Sensing. Remote Sens. 2021, 13, 2751. [Google Scholar] [CrossRef]
- Gano, B.; Dembele, J.S.B.; Ndour, A.; Luquet, D.; Beurier, G.; Diouf, D.; Audebert, A. Using UAV Borne, Multi-Spectral Imaging for the Field Phenotyping of Shoot Biomass, Leaf Area Index and Height of West African Sorghum Varieties under Two Contrasted Water Conditions. Agronomy 2021, 11, 850. [Google Scholar] [CrossRef]
- Simic Milas, A.; Romanko, M.; Reil, P.; Abeysinghe, T.; Marambe, A. The importance of leaf area index in mapping chlorophyll content of corn under different agricultural treatments using UAV images. Int. J. Remote Sens. 2018, 39, 5415–5431. [Google Scholar] [CrossRef]
- Detto, M.; Asner, G.P.; Muller-Landau, H.C.; Sonnentag, O. Spatial variability in tropical forest leaf area density from multireturn lidar and modeling. J. Geophys. Res. Biogeosciences 2015, 120, 294–309. [Google Scholar] [CrossRef]
- Almeida, D.R.; Stark, S.C.; Shao, G.; Schietti, J.; Nelson, B.W.; Silva, C.A.; Gorgens, E.B.; Valbuena, R.; Papa, D.D.; Brancalion, P.H. Optimizing the Remote Detection of Tropical Rainforest Structure with Airborne Lidar: Leaf Area Profile Sensitivity to Pulse Density and Spatial Sampling. Remote Sens. 2019, 11, 92. [Google Scholar] [CrossRef] [Green Version]
- Alonzo, M.; Bookhagen, B.; McFadden, J.P.; Sun, A.; Roberts, D.A. Mapping urban forest leaf area index with airborne lidar using penetration metrics and allometry. Remote Sens. Environ. 2015, 162, 141–153. [Google Scholar] [CrossRef]
- Dube, N.; Bryant, B.; Sari-Sarraf, H.; Kelly, B.; Martin, C.F.; Deb, S.; Ritchie, G.L. In Situ Cotton Leaf Area Index by Height Using Three-Dimensional Point Clouds. Agron. J. 2019, 111, 2999–3007. [Google Scholar] [CrossRef]
- Juutinen, S.; Virtanen, T.; Kondratyev, V.; Laurila, T.; Linkosalmi, M.; Mikola, J.; Nyman, J.; Räsänen, A.; Tuovinen, J.-P.; Aurela, M. Spatial variation and seasonal dynamics of leaf-area index in the arctic tundra-implications for linking ground observations and satellite images. Environ. Res. Lett. 2017, 12, 095002. [Google Scholar] [CrossRef]
- Asner, G.P.; Scurlock, J.M.O.; Hicke, J.A. Global synthesis of leaf area index observations: Implications for ecological and remote sensing studies. Glob. Ecol. Biogeogr. 2003, 12, 191–205. [Google Scholar] [CrossRef] [Green Version]
- Meier, U. Growth stages of mono-and dicotyledonous plants. In Federal Biological Research Centre for Agriculture and Forestry, 2nd ed.; BBCH Monograph; Blackwell Wissenschafts: Berlin, Germany, 2001; pp. 1–158. [Google Scholar]
- Deng, H.L.; Xiong, Y.C.; Zhang, H.J.; Li, F.Q.; Zhou, H.; Wang, Y.C.; Deng, Z.R. Maize productivity and soil properties in the Loess Plateau in response to ridge-furrow cultivation with polyethylene and straw mulch. Sci. Rep. 2019, 9, 3090. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mo, F.; Wang, J.Y.; Zhou, H.; Luo, C.L.; Zhang, X.F.; Li, X.Y.; Li, F.M.; Xiong, L.B.; Kavagi, L.; Nguluu, S.N.; et al. Ridge-furrow plastic-mulching with balanced fertilization in rainfed maize (Zea mays L.): An adaptive management in east African Plateau. Agric. For. Meteorol. 2017, 236, 100–112. [Google Scholar] [CrossRef]
- Jiang, Y.; Li, C.; Paterson, A.H.; Sun, S.; Xu, R.; Robertson, J. Quantitative analysis of cotton canopy size in field conditions using a consumer-grade RGB-D camera. Front. Plant Sci. 2018, 8, 2233. [Google Scholar] [CrossRef] [PubMed] [Green Version]


















| Parameters | Technical Specifications |
|---|---|
| Copter type | HP-X4-E1200 (HEXAPILOTS, Dresden, Germany) |
| Propulsion | Electric, DJI E1200 (DJI Innovation, Shenzhen, China) |
| Dimensions | Wingspan 125 cm, height 57 cm |
| Endurance | 12 min |
| Navigation support | GPS, manual/autonomous |
| Flight control | Pixhawk 2.1 (ProfiCNC, Black Hill, Australia) |
| Communication | Micro Air Vehicle Link (MAVLink) |
| Radio remote control | FlySky remote controller system |
| Mission | Mission planner, open-source software |
| Battery type | Lipo, 10000 mAh, voltage 22.2 V, continuous/peak C-rate of 25 C/50 C |
| Weight | 4 kg (battery included) |
| Max. payload | 1 kg |
| Parameters for crop estimation | 80% overlap, flight speed of 3 m/s, height of 15 m in nadir, 21 m in oblique |
| Camera type | Sony Alpha 6000, APS-C sensor, 24.3 megapixels, objective 16 mm, f/2.8. |
| Camera setup | 1/1000 s, ISO 100-200, Auto f, daylight mode |
| Flight Task * | Flight Date | Flight Objective | Flight Height (m) | FRO ** (m) | Growth Stage (BBCH Scale) | No. of Collected Images | Wind Speed (m/s) | |
|---|---|---|---|---|---|---|---|---|
| (Avg.) | (Max Gust) | |||||||
| A1, N | 20 June 2019 | Ground model | 21 | 0 | 12–15 | 93 | [2, 3] | [5, 6] |
| A1, O | 15 | 14 | 459 | |||||
| B1, N | 25 June 2019 | Crop canopy | 21 | 0 | 32 | 146 | [3, 5] | [7, 9] |
| B1, O | 15 | 14 | 470 | |||||
| B2, N | 16 July 2019 | Crop canopy | 21 | 0 | 61–67 | 99 | [5, 6] | [8, 9] |
| B2, O | 15 | 14 | 471 | |||||
| B3, N | 31 July 2019 | Crop canopy | 21 | 0 | 69 | 104 | [2, 3] | [4, 5] |
| B3, O | 15 | 14 | 469 | |||||
| B4, N | 13 August 2019 | Crop canopy | 21 | 0 | 72 | 100 | [5, 6] | [9, 10] |
| B4, O | 15 | 14 | 461 | |||||
| A2, N | 19 September 2019 | Ground model | 21 | 0 | 99 | 107 | [3, 5] | [7, 8] |
| Date | Original Images | Aligned Images after Masking | ||||||
|---|---|---|---|---|---|---|---|---|
| Number | GSD (mm/pix) | Precision RMSE | Number | GSD (mm/pix) | Precision RMSE | |||
| Point Cloud (mm) | * GCPs XYZ (mm, pix) | Point Cloud (mm) | * GCPs XYZ (mm, pix) | |||||
| 25 June 2019 | 633 | 5.7 | 2.0 | 38.6 (0.30) | 616 | 5.84 | 1.7 | 36.6 (0.27) |
| 16 July 2019 | 582 | 5.16 | 1.6 | 36.6 (0.45) | 570 | 5.63 | 2.0 | 30.0(0.16) |
| 31 July 2019 | 578 | 5.45 | 1.6 | 38.5 (0.75) | 573 | 5.69 | 1.9 | 26.5 (0.37) |
| 13 August 2019 | 581 | 6.06 | 1.5 | 35.1 (0.45) | 561 | 5.84 | 1.8 | 30.2 (0.11) |
| Mean | 593 | 5.60 | 1.7 | 37.2 (0.49) | 580 | 5.75 | 1.85 | 30.8 (0.23) |
| Cultivar | Height Parameter | R2 | RMSE | rRMSE (%) | Fitted Function |
|---|---|---|---|---|---|
| LG30222 | 0.89 | 0.14 | 8.67 | ||
| 0.86 | 0.13 | 8.12 | |||
| LG30256 | 0.86 | 0.14 | 8.36 | ||
| 0.47 | 0.27 | 16.47 | |||
| LG31211 | 0.78 | 0.13 | 8.52 | ||
| 0.67 | 0.16 | 9.55 | |||
| General | 0.80 | 0.15 | 9.71 | ||
| 0.60 | 0.21 | 12.92 |
| Parameters | Descriptor | Definition | Value |
|---|---|---|---|
| Canopy height | CH95 | 95 percentile | 1.82 m |
| CH90 | 90 percentile | 1.50 m | |
| Point density distribution | D0.08 | Area range 0.08 × 0.08 m | 0.95 |
| D0.15 | Area range 0.15 × 0.15 m | 0.92 | |
| D0.25 | Area range 0.25 × 0.25 m | 0.71 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Shamshiri, R.R.; Schirrmann, M.; Weltzien, C.; Shafian, S.; Laursen, M.S. UAV Oblique Imagery with an Adaptive Micro-Terrain Model for Estimation of Leaf Area Index and Height of Maize Canopy from 3D Point Clouds. Remote Sens. 2022, 14, 585. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14030585
Li M, Shamshiri RR, Schirrmann M, Weltzien C, Shafian S, Laursen MS. UAV Oblique Imagery with an Adaptive Micro-Terrain Model for Estimation of Leaf Area Index and Height of Maize Canopy from 3D Point Clouds. Remote Sensing. 2022; 14(3):585. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14030585
Chicago/Turabian StyleLi, Minhui, Redmond R. Shamshiri, Michael Schirrmann, Cornelia Weltzien, Sanaz Shafian, and Morten Stigaard Laursen. 2022. "UAV Oblique Imagery with an Adaptive Micro-Terrain Model for Estimation of Leaf Area Index and Height of Maize Canopy from 3D Point Clouds" Remote Sensing 14, no. 3: 585. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14030585