1. Introduction
Normally, forest aboveground biomass (AGB) is widely used to evaluate the geographical and temporal variations and the potential carbon sink of forest ecosystems [
1,
2]. Thereby, quantitative mapping forest AGB is valuable for evaluating forest quality [
3]. Traditional forest AGB surveying and mapping require a large amount of human and material resources. In recent years, remote sensing technology is becoming an important means of forest mapping and dynamic monitoring [
4]. Unaffected by cloud cover and solar illumination, synthetic aperture radar (SAR) data coupled with quad-polarimetric techniques bear significant potential for mapping forest AGB and forest carbon stocks assessment in heterogeneous complex biophysical environments [
5,
6,
7,
8,
9]. Due to higher penetration through the forest canopy and greater sensitivity to the forest components, it has been confirmed that L-band quad-polarimetric ALOS-2 SAR images are more suitable for mapping forest AGB in planted forests [
10,
11,
12].
To precisely estimate forest AGB, alternative features are firstly required to extract from SAR images, and the accuracy of mapped forest AGB is directly determined by the sensitivity of features [
13,
14]. Commonly, there are three types of polarimetric features widely used for AGB estimation [
15,
16]. The first type is the backscattering coefficients of difference polarimetric modes directly extracted from the quad-polarimetric SAR images [
17,
18]. In addition, various radar vegetation indices and texture features with various sizes are also obtained based on intensity images of backscattering coefficients [
19]. The second one is features derived from SAR interferometry (InSAR) or polarimetric SAR interferometry (PolInSAR), such as coherence with various polarizations [
20,
21]. However, it is difficult to obtain enough data to meet the requirements of InSAR or PolInSAR at present [
22]. The last one is the features associated with target scattering processes extracted from the quad-polarimetric SAR images by various polarimetric decomposition theory [
23,
24,
25,
26,
27,
28,
29]. For mapping forest AGB, these features extracted from polarimetric decomposition theory have shown more sensitivity than backscattering coefficients. However, the polarimetric response of a target is strongly dependent on its orientation. Thereby, the correct understanding and interpretation of PolSAR data in forests are hindered by scattering mechanism ambiguity caused by the target orientation diversity effect.
To further interpret the scattering mechanism related to forest canopy, roll-invariant polarimetric features are commonly applied to reduce the effect of the target orientation. Based on uniform polarimetric matrix rotation theory, several polarimetric features in the rotation domain have been proposed and applied to vegetation classification using L-band airborne SAR images [
30]. This theory proposes the methods of rotational domain around the radar line of sight to complement the information of the rotation invariant feature of polarized SAR data, which can obtain the implicit information of the target in the rotational domain formed around the radar line of sight [
31]. Though, these proposed features have been successfully applied to artificial target detection and crop classification, the capability of these features is unknown for mapping forest AGB using satellite-based quad SAR images [
32,
33]. Facing more complex geography, canopy shape, and vertical structure characteristics in forests, further investigation should be performed to interpret the meanings of features extracted from uniform polarimetric matrix rotation theory and further evaluate the sensitivity between these features and forest AGB.
Moreover, after extracting alternative features, how to obtain the optimal feature set is a key point to improving the accuracy of mapping forest AGB [
4,
34]. Limiting the capability and saturation problems of single-variable models, it is difficult to obtain reasonable and reliable forest AGB [
10,
35]. Recently, multi-variable models have become the mainstream of parameter estimation, and how to evaluate and select the optimal feature sets becomes a difficult task [
36,
37]. Normally, the widely accepted feature evaluating criteria are mainly based on the linear or nonlinear relationships between features and forest AGB, such as importance, maximal information coefficient (MIC), and Pearson correlation coefficient [
38,
39]. However, without considering the sensitivity and saturation levels of features, it is rather difficult to evaluate the capability of selected features for mapping forest AGB, especially for the forest plantation with a high growing stem volume (GSV) [
40,
41]. Moreover, a sensitivity index (SI) has been proposed to express the relationship between polarimetric characteristics and AGB, which considers the saturation and the correlation problems [
42]. Therefore, it is meaningful that future studies should be performed to assess SI as a feature evaluation criterion in mapping forest AGB.
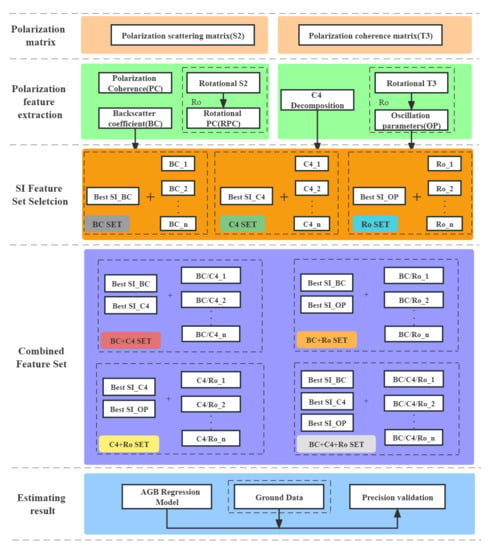
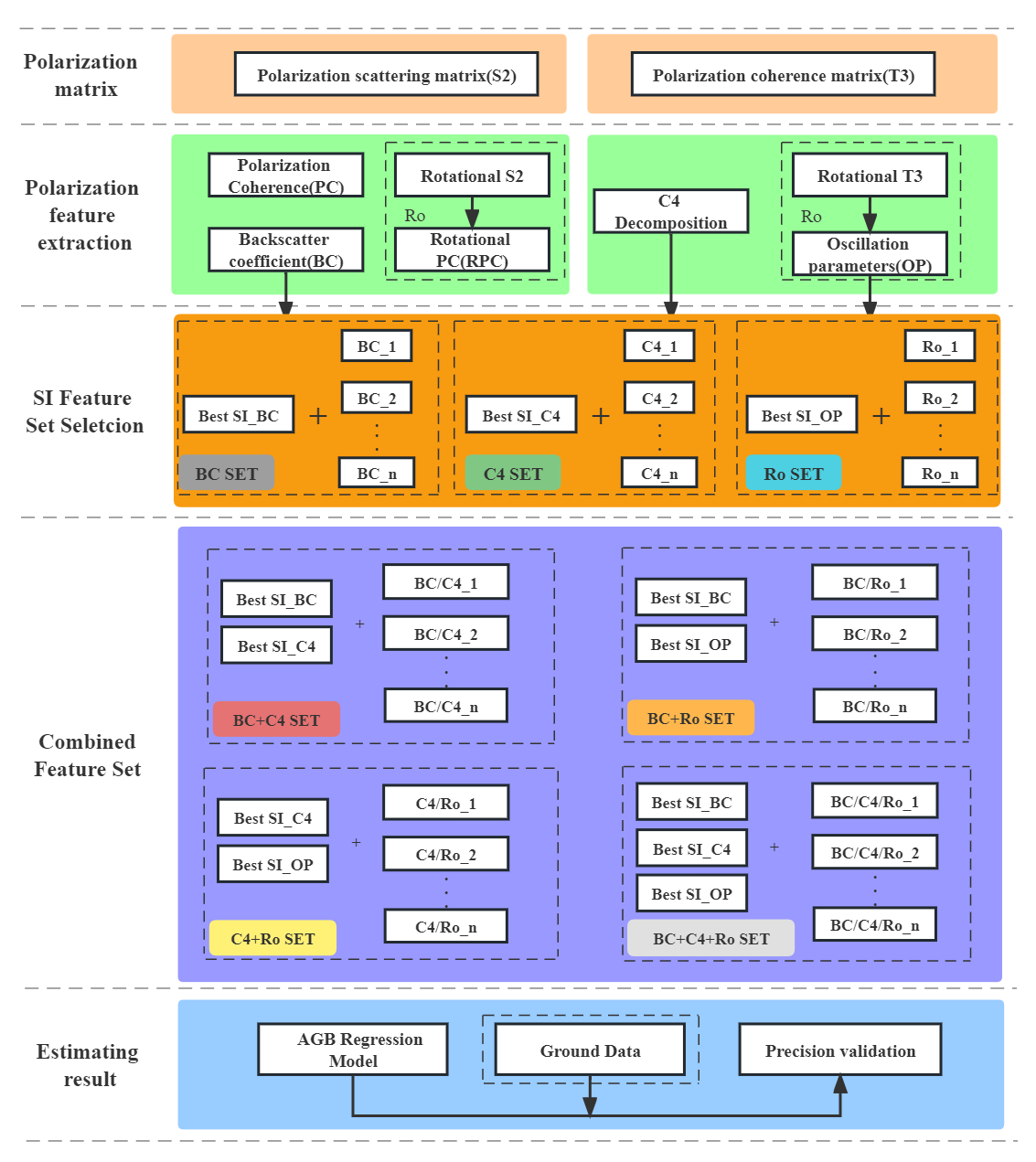
In this study, to interpret the response of features related to the forest in the rotation domain, several rotated features were extracted from L-band quad-polarimetric SAR images based on uniform polarimetric matrix rotation theory. Then, the sensitivity of rotated features with forest parameters was evaluated by Pearson correlation coefficient, sensitivity index (SI), and saturation levels. Subsequently, a proposed feature selection method based on SI was applied to obtain optimal feature sets from several types of alternative features. Finally, the forest AGBs with various feature combinations were inverted by these optimal feature sets and multiple linear regression models (MLR), and the capability of various features for mapping forest AGB was explored.
3. Methodology
3.1. Backscattering Coefficient and Its Derived Features
Normally, backscattering coefficients with various polarizations are widely used in mapping forest AGB. In this study, four backscattering coefficients (
,
,
,
) were extracted from ALOS-2 images. The following conversion equation can be used to perform intensity conversion of backscatter coefficients for the four channels to provide target intensity information [
35,
44].
where
I and
Q are the real and imaginary parts of the complex images;
CF is the radiometric calibration factor (−83 dB); and
A is the conversion factor (32 dB). Then, the derived features, including backscatter coefficient ratio with various combinations, radar vegetation indices, and texture features with different sizes can be extracted from four backscatter coefficients [
21,
45] (
Table 2).
3.2. Features Extracted from Polarization Decomposition
Normally, quad-Polarimetric SAR data can be used to extract the target’s scattering characteristics based on polarimetric decomposition theory. At present, the approaches to the forest area are mainly based on four-component polarimetric decomposition. In this study, the widely used four-component decomposition method proposed by Yamaguchi was applied to extract features from the polarimetric coherence matrix (
), including surface scattering (
ODD), double-bounce scattering (
DBL), volume scattering (
VOL), and helix scattering (
HLX). The following is a formula for the appropriate total scattering (
SPAN) [
15]:
To enlarge the number of alternative features, the normalized scattering components between different scattering mechanisms were obtained by the ratio transformation. Moreover, the ratio between the components, such as DBL/ODD, DBL × OL, and other ratio-derived variables were also applied to map forest AGB in the next step.
3.3. Polarimetric Features in the Rotation Domain
Commonly, the scattering intensity severely depends on the orientation of the target, and the polarization mode correspondence of SAR to the target is also closely related to the relative geometry of the target. Because of complex vertical and horizontal structures of the forest canopy, it is more complicated to interpret scattering signals of the forest canopy [
31]. Therefore, it is necessary to further interpret the orientation of the forest canopy to obtain more characteristics related to forest parameters.
For quad-polarization SAR, the full polarimetric information can be extracted from the polarization scattering matrix (
S2). Based on the theory of rotational domain polarization, the polarization scattering matrix can be deformed to
S(
θ) by rotating the previously specified
by a certain angle around the radar line of sight [
30]:
where
is the rotation angle ranging from −π to π,
is the rotational polarization scattering matrix,
is the rotation matrix
, and
H denotes the conjugate transpose. Subsequently, the rotated polarization coherence matrix
is also created by rotating
by the same amount around the radar line of sight:
where
is the rotation matrix
.
3.3.1. Polarimetric Features Extracted from Oscillation Parameters
To decode the rotational properties of each element of
after rotation, a further analysis of
followed as [
31]:
and the powers of
followed as:
For elements of the rotated polarization coherence matrix
T(
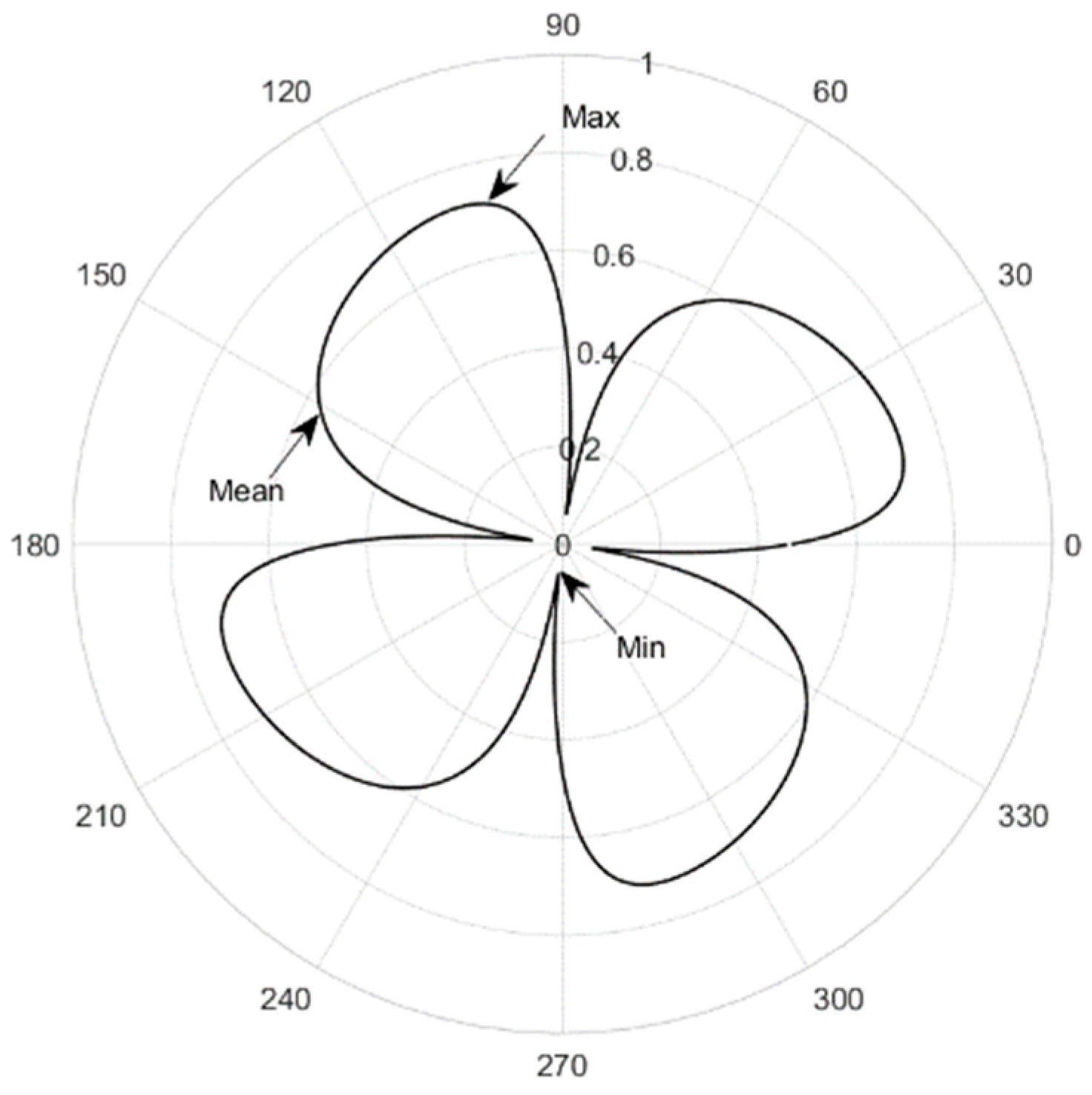
θ), a uniform representation of a sinusoidal function by mathematic transformations can be used to express the rotationally polarized coherence matrix as shown below [
30]:
where
A is the amplitude of oscillation,
B is the center of oscillation,
ω is the angular frequency, and
is the initial angle. Therefore, for each element in the rotationally polarized coherence matrix, four parameters,
A,
B,
ω, and
, can be used to express explicit relationships related with
. So, these parameters in each element are viewed as new characteristic parameters to characterize the elements.
The elements of
are expressed by uniform sinusoidal function are
,
,
,
,
,
,
and
. The same or equivalent information exists for the oscillation parameters of these elements such as
is the same as
. Finally, there are 12 final oscillation parameters (OP) with independent information, which are summarized in
Table 3.
3.3.2. Polarimetric Coherence Features in Rotation Domain
A frequently utilized polarization feature is the polarization coherence feature (PC) of the polarization SAR, which is written as follows [
46]:
where
and
denote arbitrary polarization channels. After replacing
and
with the rotational domain scattering matrix considering the rotational domain, the rotational domain polarization coherence features (RPC) is obtained as follows [
32]:
where (
θ) ∈ [−π, π). Thus, four independent RPC features can be obtained:
,
,
,
. Furthermore, the RPC features under each channel can in turn be derived from multiple features, as shown in
Figure 2. The derived RPC features are shown in
Table 4.
3.4. Sensitivity of Polarimetric Features
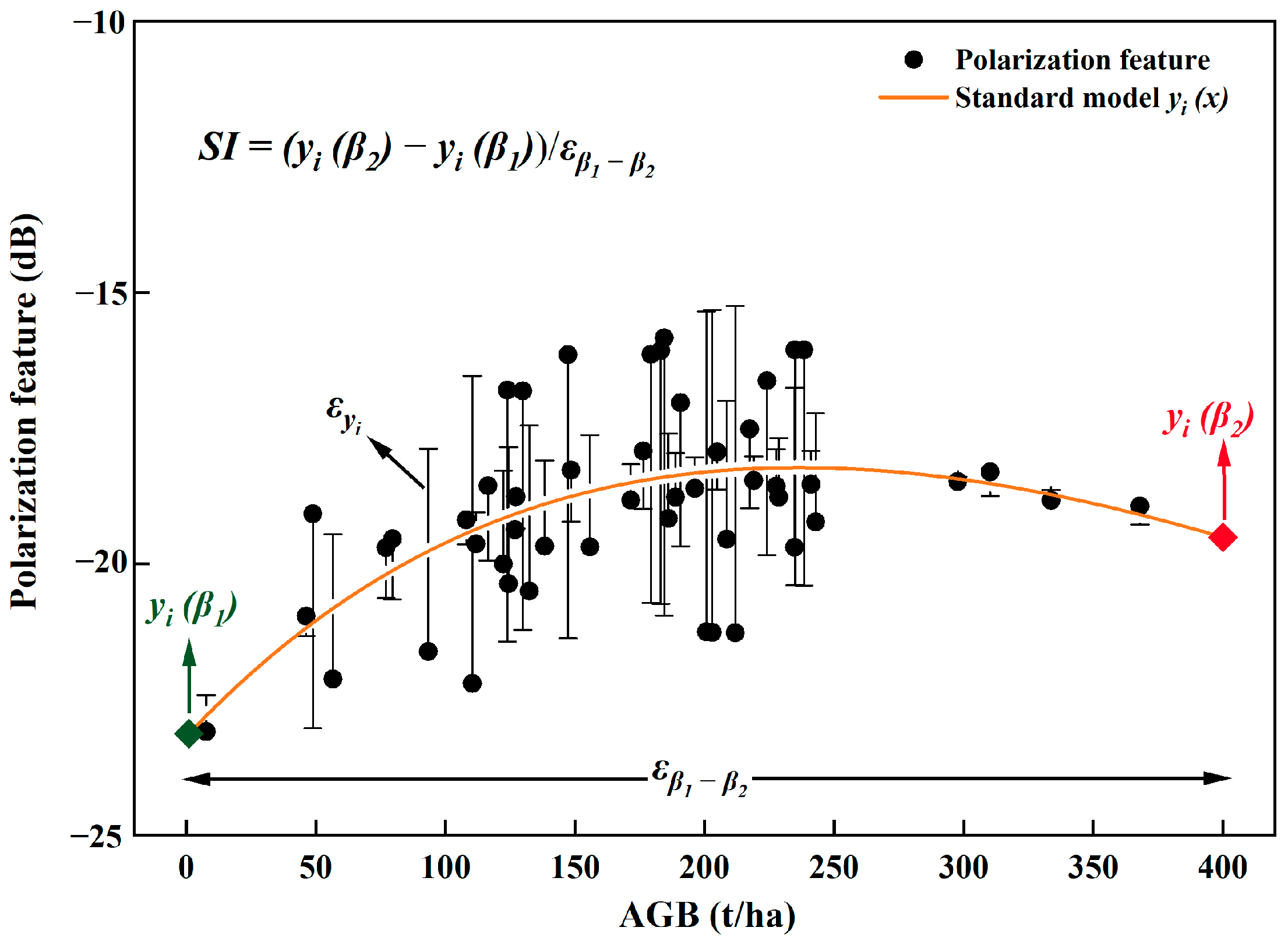
To map forest AGB using quad-polarimetric SAR images, the sensitivity of features with forest parameters should be initially evaluated. Normally, it is a rather complex issue to evaluate the sensitivity between polarimetric features and forest parameters. The common approach is visual interpretation by scatterplots or quantitative indicators using Pearson correlation coefficients or saturation levels. In a previous study, a sensitivity index (SI) has been proposed to express relationship between polarimetric characteristics and AGB, which considers the saturation and the correlation problems [
42].
Using a conventional semi-exponential model, the sensitivity of polarimetric features is constructed as followed:
where
indicates polarimetric feature,
is AGB, and
a,
b, and c are model coefficients, which are obtained by least squares fitting. The sensitivity index (SI) of a polarimetric feature, which can reflect the sensitivity of a polarimetric feature within a specific AGB interval, is obtained as follows:
where
denotes the standard error of this feature model in the AGB interval of
. The AGB of ground samples in this study ranged from 7.69 t/ha to 367.99 t/ha, so the
interval of the SI of each polarimetric feature is selected from 0 t/ha to 400 t/ha.
Figure 3 indicates the schematic diagram of SI, the value of SI is determined by two parts: (1) The difference between the fitted model at the beginning and the end of the interval, the larger the greater the indication that the feature still has a good response as the AGB increases. (2) The standard deviation of the fitted model estimates in the interval, the smaller the better the response relationship between the feature and AGB. It is confirmed that SI indicates both the saturation problem and the correlation problem between features and AGB. The larger the SI, the greater the sensitivity between the feature and AGB.
3.5. Feature Selection with SI and Mapping AGB
After extracting alternative features from quad-polarimetric SAR images, how to obtain the optimal feature set is a key point to improve the accuracy of mapping forest AGB. Normally, the accuracy of mapped forest AGB is directly dependent on the sensitivity of the selected feature set. However, the Pearson correlation coefficient based on linear independence finds it hard to express the nonlinear correlations. Moreover, the range of accurately estimated forest AGB is also determined by saturation levels of polarimetric features. In previous studies, the sensitivity index has shown great potential to express the relationship between polarimetric characteristics and AGB [
42]. In this study, the values of SI can be also employed as a criterion and proposed to evaluate the capability of features for mapping forest AGB [
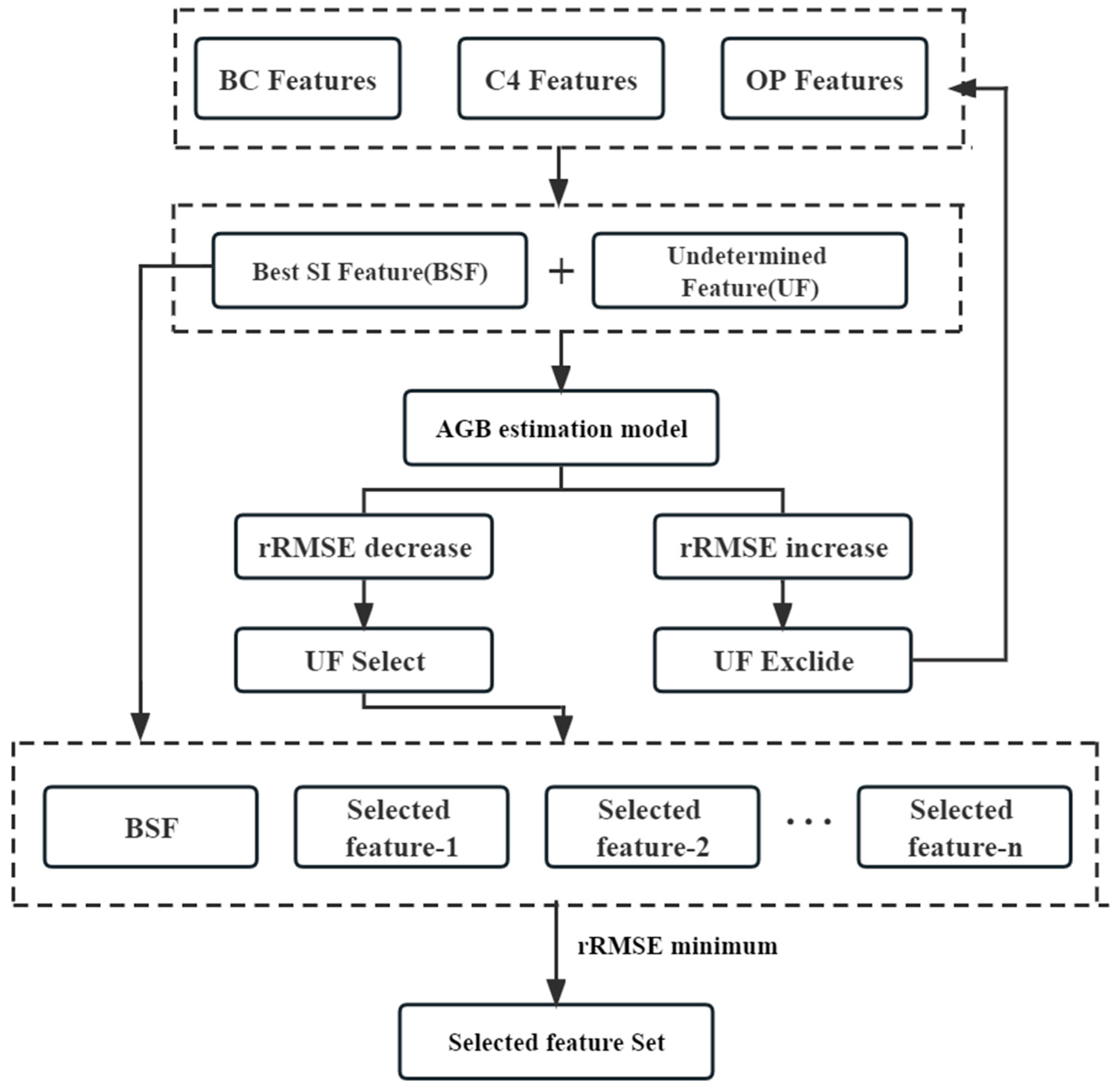
42]. So, the proposed feature selection method with SI criterion was constructed (SIS) as follows:
Step 1. SI of all features in the alternative feature set is calculated and ranked and the feature with the largest SI value is selected as the first one in the optimal feature set.
Step 2. Using the feature with the largest SI, the AGB regression model with multiple linear regression (MLR) is constructed and the relative mean square error (rRMSE) between predicted and ground measured AGB is obtained by the leave-one-out cross-validation (LOOCV).
Step 3. After that, the remaining sorted features are added one by one to the optimal features, and the updated rRMSE is obtained using the updated optimal feature set. If the updated rRMSE decreases after adding features ranked according to SI, the feature should remain in the optimal feature set. Otherwise, the feature should be removed from the optimal feature set.
Step 4. The optimal feature set is ultimately determined by the smallest rRMSE. The SIS method’s schematic diagram (
Figure 4) is displayed below.
Furthermore, the Pearson correlation was also applied to obtain optimal feature sets for comparing. Three different polarimetric feature sets (backscatter coefficients and derived features (BC), four-component polarimetric decomposition features (C4), and rotated polarimetric features (Ro)) were used to map the AGB of the forest, and their sensitivity to different forest parameters was assessed by SI. Ultimately, forest AGB were mapped using common MLR and optimal feature sets obtained by proposed feature selection method. In addition, LOOCV method was also applied to obtain evaluation indices, such as coefficient of determination (R2), the root mean square error (RMSE), and the relative mean square error (rRMSE) between the estimated and measured AGB.
4. Results
4.1. Response Analysis of Forest Parameters and Polarization Features
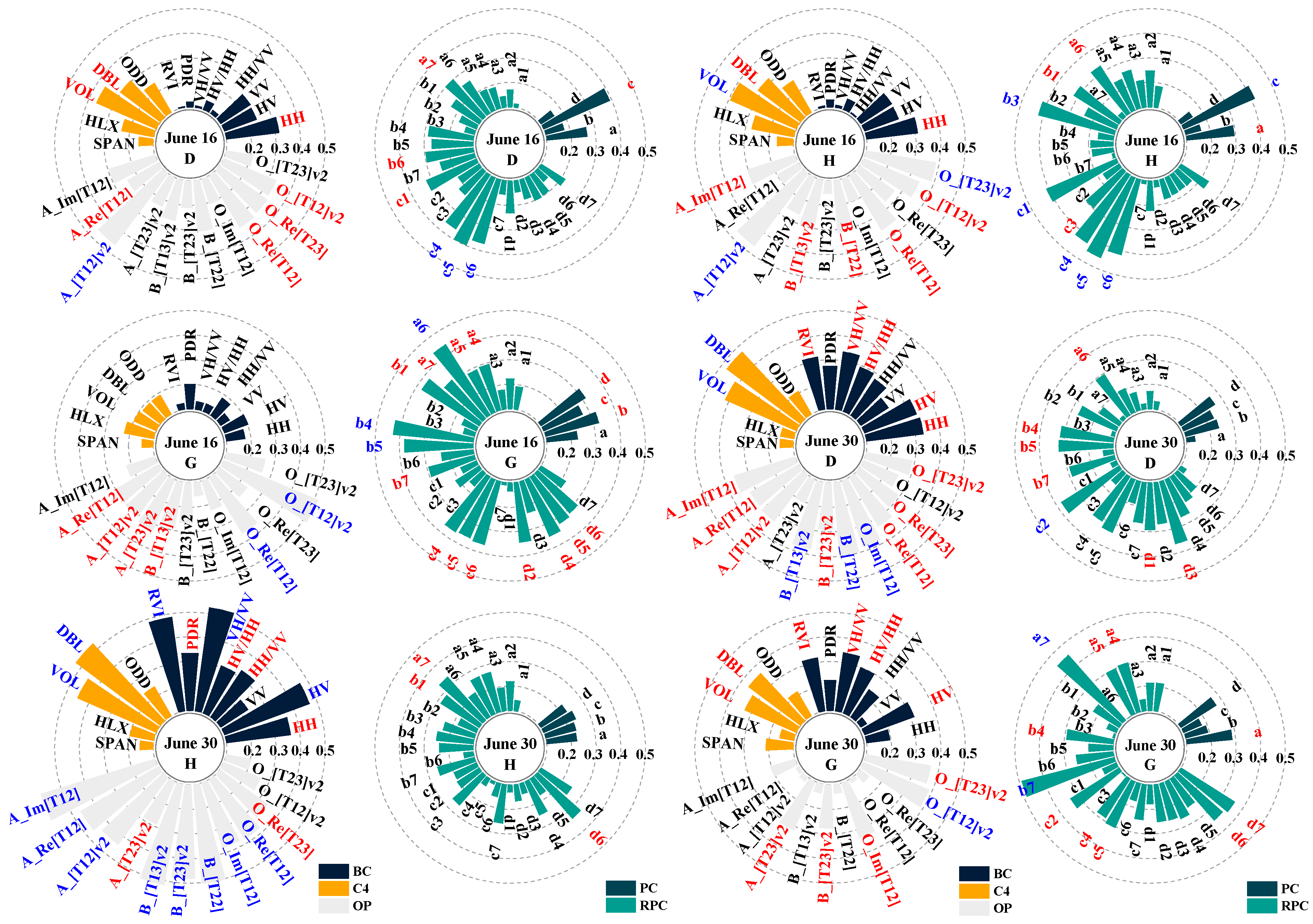
After deriving polarimetric features from SAR images, three forest parameters related to AGB (average DBH (D), forest average height (H), and forest stand average crown width (G)) were chosen to analyze the correlations with polarimetric features. This study involved polarimetric features, including backscattering coefficients with difference polarizations (BC), polarimetric decomposition features (C4), oscillation parameters (OP), original polarimetric coherence (PC), and rotational domain polarimetric coherence (RPC). The Pearson correlation coefficient was calculated and a significance test was also carried out for each type of feature and Pearson correlation coefficients between each selected feature and forest parameters are illustrated in
Figure 5.
For three involved forest parameters (D, H, and G), it is illustrated that the number of oscillation parameters with the Pearson correlation larger than 0.3 is more than that related to backscattering coefficients and decomposition features. Moreover, the OP features had the highest correlation features with three forest parameters (D, H, and G). Furthermore, based on the theory of rotational domain polarimetric, more features were obtained from rotational domain polarimetric coherence, and the Pearson correlations of most features related to RPC are obvious higher than these features related to original polarimetric coherence. It is confirmed that the number of alternative features with high Pearson correlations is obviously increased and the sensitivity between forest parameters and features related to rotational domain polarimetric are improved after using the theory of rotational domain polarimetric.
4.2. The Results of Sensitivity
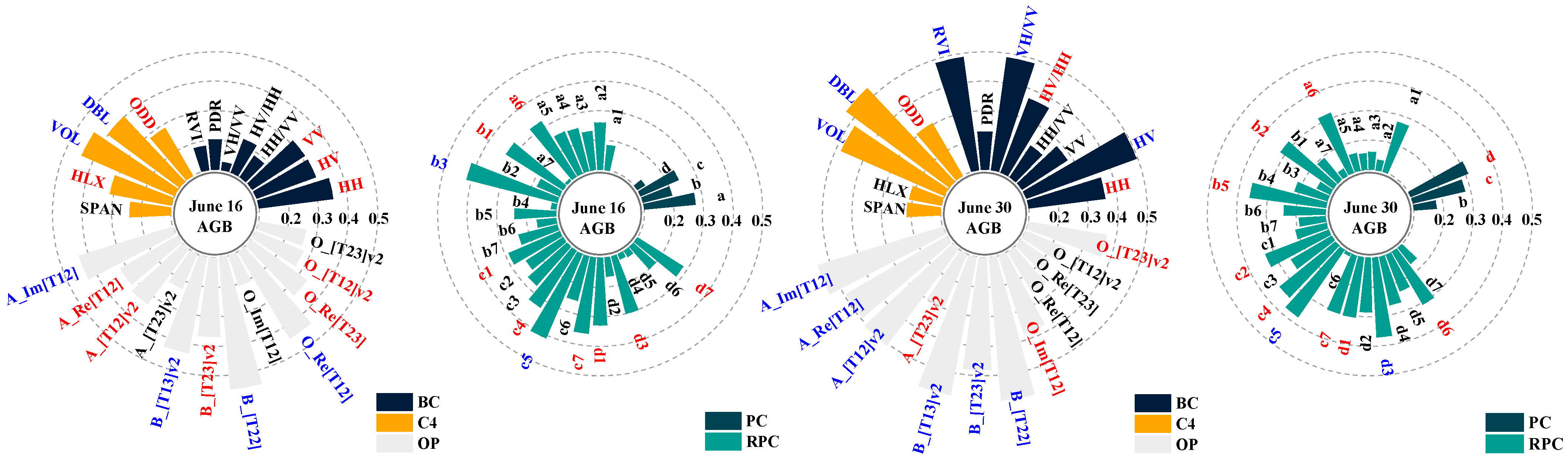
To evaluate the relationships between alternative features and forest AGB, the Pearson correlations between all alternative features and forest AGB are shown in
Figure 6. For one quad polarimetric SAR image, all polarimetric features were split into two groups (BC, C4, and OP, PC and RPC). For the images acquired on 30 June, the Pearson correlations of the first group ranged from −0.296 to 0.486, and the number of features larger than 0.4 is four for OP and 1 for BC and C4, respectively. In addition, the Pearson correlations of the second group ranged from −0.181 to 0.210 for PC, and from −0.271 to 0.277 for RPC, respectively. It is confirmed that features extracted from Oscillation parameters are more sensitive to forest AGB than that extracted from polarimetric decomposition (C4) and polarimetric coherence features. In addition, because of the difference in weather conditions of the images acquired to date, the gaps of sensitivity between the two images are also illustrated in
Figure 6.
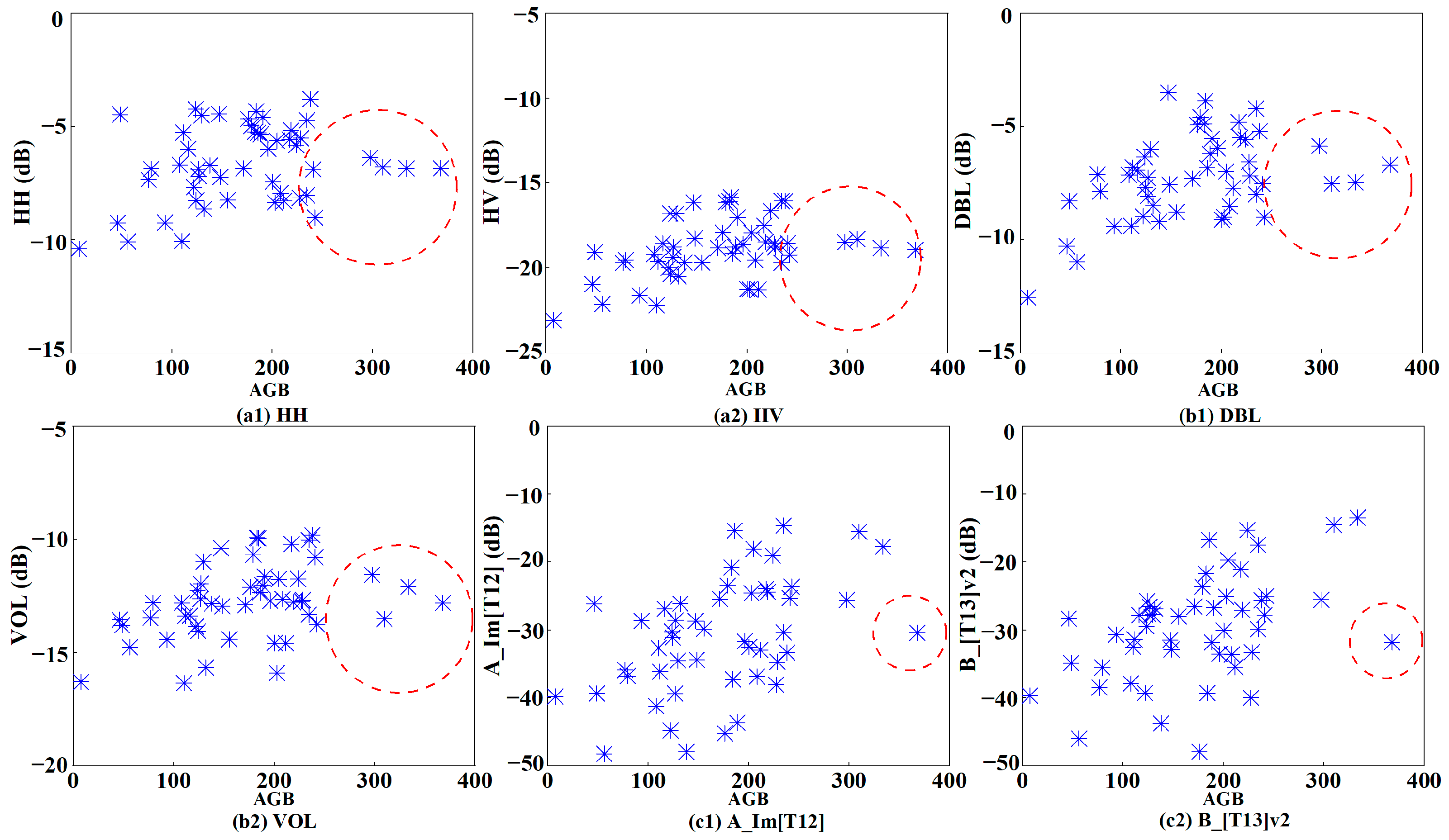
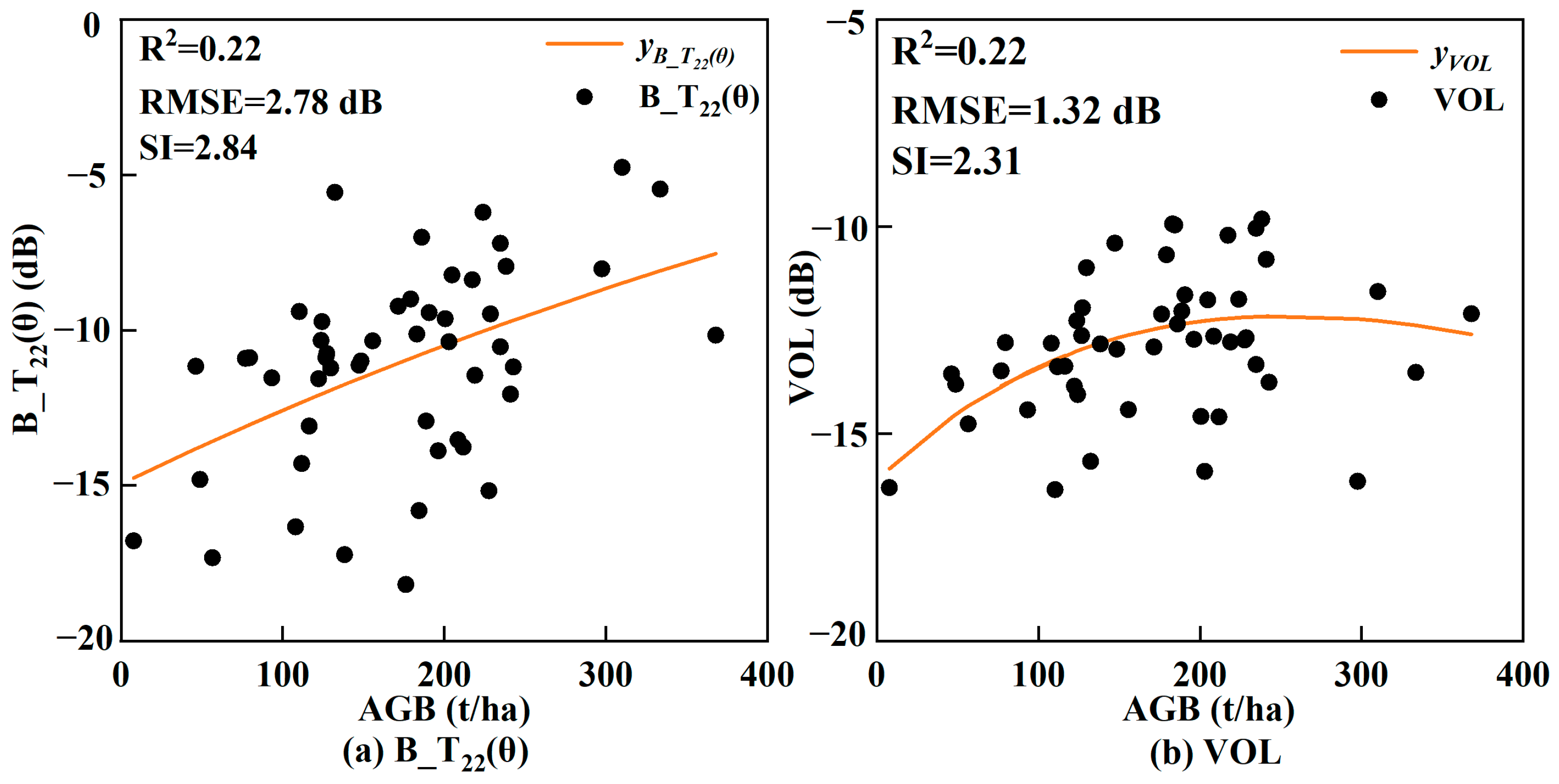
To further evaluate the relationships between feature and forest AGB, several features (HH (dB), HH (dB), DBl(dB), Vol (dB),
and
) were employed to illustrate the scatters related with forest AGB (
Figure 7). The scatters illustrated that both BC features and C4 features of SAR images have a good response relationship with AGB before 200 t/ha, and it becomes more challenging to respond accurately to AGB after 200 t/ha. It is confirmed that the saturation phenomenon is obviously observed for these common features, such as HH (dB), HH (dB), DBl(dB), and Vol (dB). Furthermore, OP features (
, and
) may be more sensitive with the AGB, even forest AGB larger than 200 t/ha, with the saturation levels ultimately occurring at roughly 300 t/ha. The results demonstrated that the proposed features extracted from rotational domain polarimetric have higher saturation levels than these traditional features.
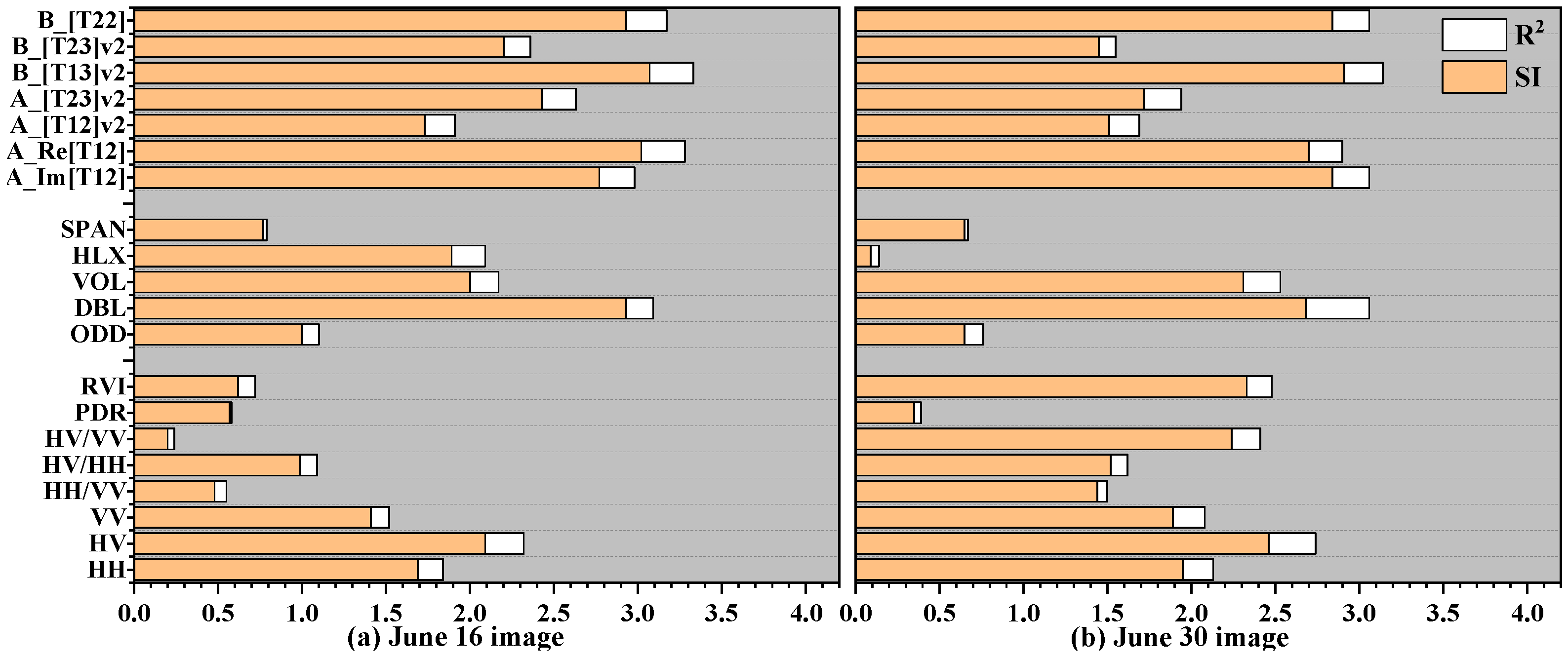
To quantitatively express the sensitivity between features and forest AGB, SI was applied to evaluate the capability of features for mapping forest AGB. In this study, backscattering coefficients with difference polarizations (BC), polarimetric decomposition features (C4), and intensity of proposed features (A_ [·] and B_ [·]) were employed to obtain the SI (
Figure 8). The SI values of proposed features ranged from 1.73 to 3.07 for SAR images acquired on 16 June, and from 1.45 to 2.91 for SAR images acquired on 30 June, respectively. The largest SI value was obtained by
for two acquired images (16 June: 3.07; 30 June: 2.91). It is also found that the values of SI and R2 derived from features related to oscillation parameters (OP) are significantly larger than that from backscattering coefficients with difference polarizations (BC) and polarimetric decomposition features (C4). Compared with traditional features (BC and C4), the results demonstrated that features related to oscillation parameters (OP) have high sensitivity to forest AGB.
4.3. The Results of Feature Selection Based on SI
To evaluate the capability of involved features in mapping forest AGB, all alternative features were grouped into three categories. The first category is the BC feature set, including the backscattering coefficient features and its derived features, and the second is the C4 feature set, including four-component polarimetric decomposition features and its derived features, and the OP features and the RPC features are regarded as Ro feature sets. For each category, the optimal feature set is obtained by the feature selection method. In this study, a proposed feature selection method (SIS) combined sensitivity index (SI) with common MLR was applied to obtain optimal feature sets. For comparison, the feature selection method combined Pearson correlation with MLR (PSS) was also applied to obtain optimal feature sets. Using two feature selection methods within three categories of feature sets, the optimal feature set of each category was obtained with the smallest rRMSE values.
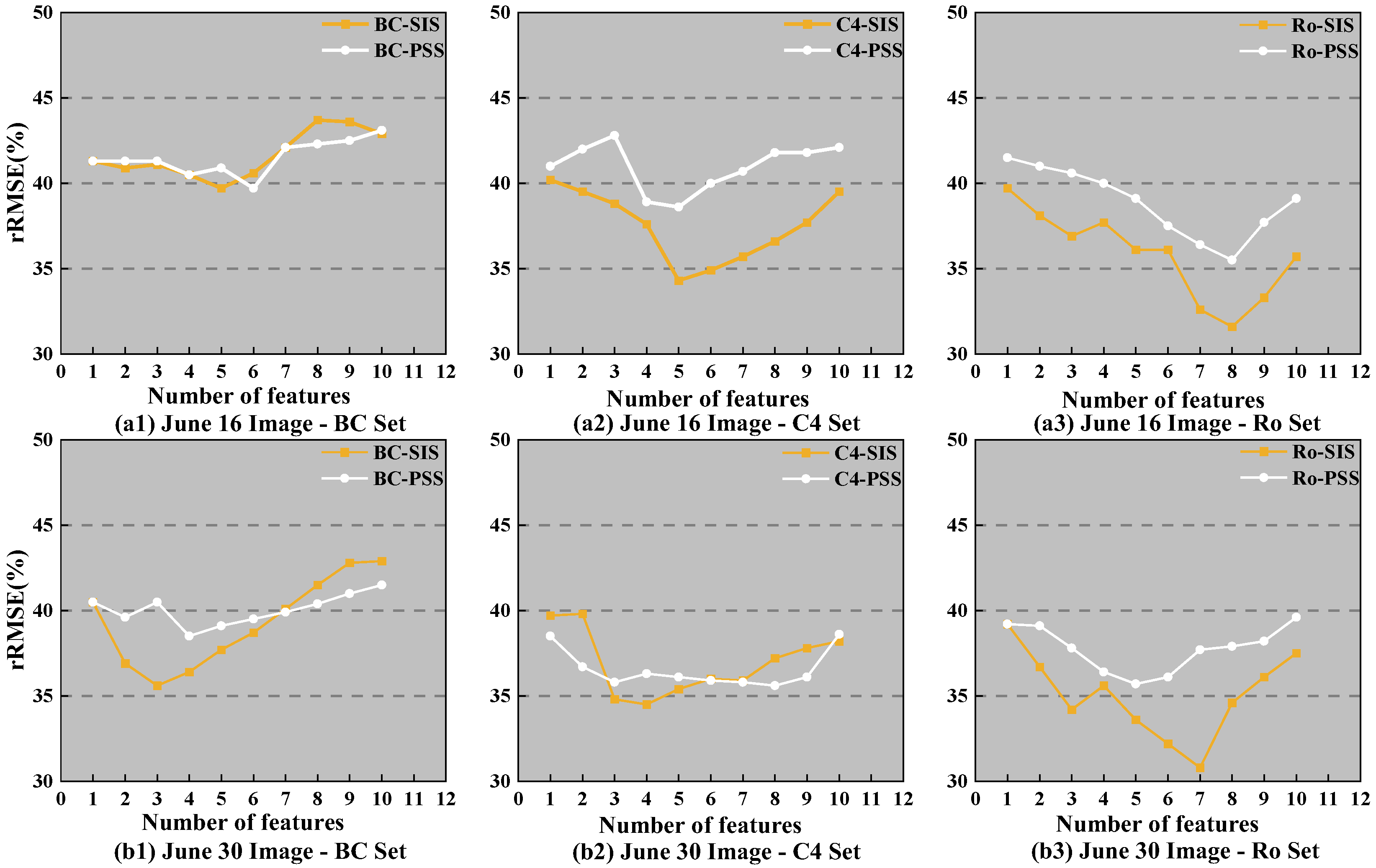
In this study, the maximum number of optimal feature sets was ten for reducing the amount of computation for mapping forest AGB.
Figure 9 illustrated that the rRMSE values varied with the number of optimal feature sets with various feature selection methods for two acquired SAR images. The results showed that rRMSE values varied with the number of features in optimal feature sets, and the smallest rRMSE could be easily observed in each category using two feature selection methods. Furthermore, the rRMSE using the optimal feature set by the proposed SIS feature selection method is significantly lower than that by the PSS feature selection method. It is confirmed that the proposed SIS feature selection method is more suitable for mapping forest AGB than the PSS feature selection method.
4.4. Mapping Forest AGB Using Various Types of Feature Sets
To evaluate the potential of optimal feature sets, several models are widely applied to invert forest AGB. In this study, widely used MLR was employed to estimate the forest AGB for reducing the gaps induced by various models. After obtaining the optimal feature sets, forest AGB was estimated by MLR using various types of features. Three accuracy indices (R2, RMSE, and rRMSE) extracted from the LOOCV method were applied to evaluate the performance of various optimal feature sets and the results were listed in
Table 5.
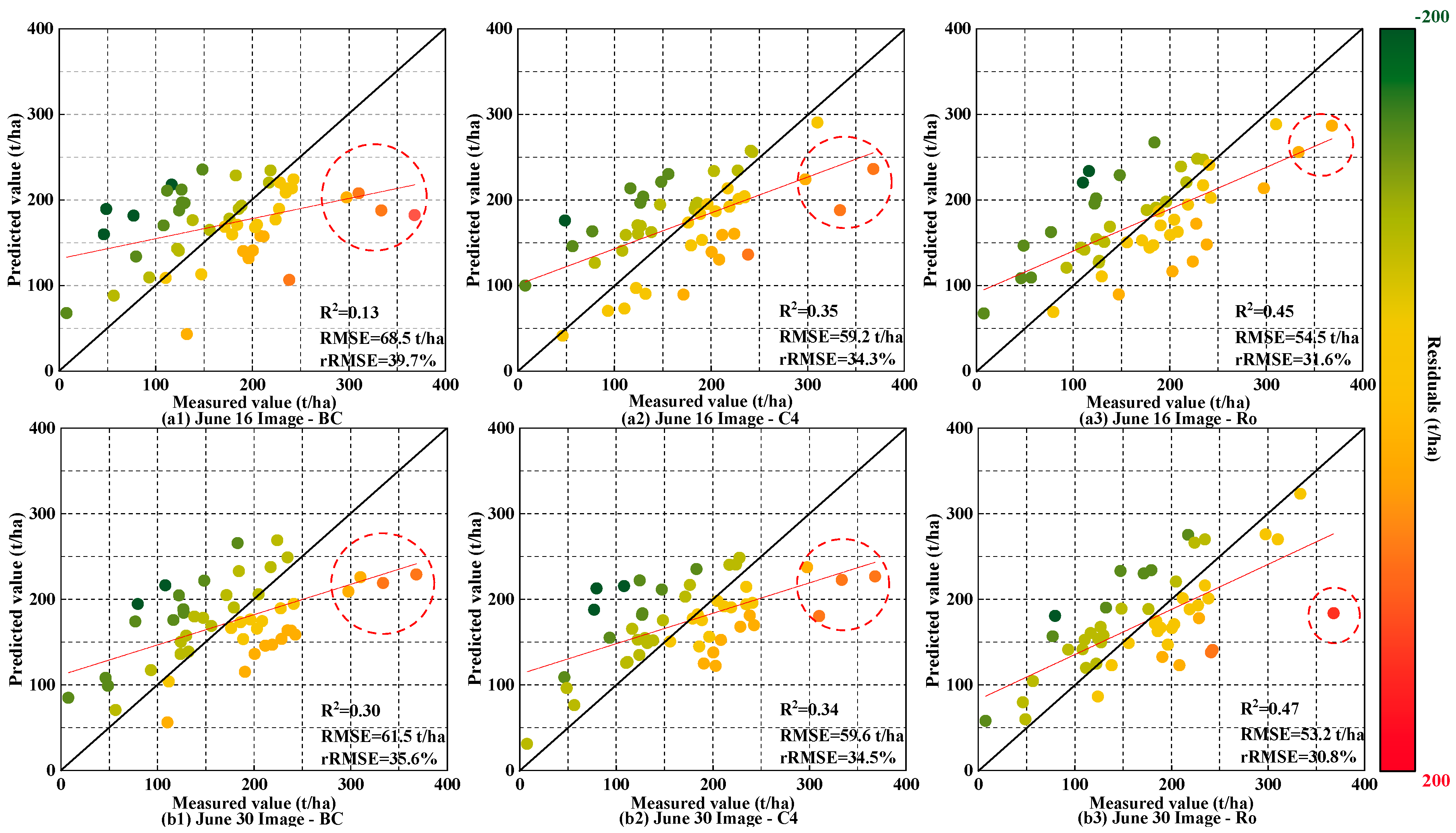
The results showed that the accuracy of estimating forest AGB is obviously improved by the proposed feature selection method. Using optimal feature sets obtained by SIS, the rRMSE values between predicted and ground-measured AGB ranged from 31.6% to 39.7% for images acquired on 16 June, and from 30.8% to 35.6% for images acquired on 30 June, respectively. For two images, the values of R2 using SIS (ranging from 0.13 to 0.47) are significantly larger than that using PSS (ranging from 0.13 to 0.34). Moreover, within three feature categories, the highest accuracy of results is obtained from the Ro feature set with the SIS method. It is demonstrated that features based on the theory of rotational domain polarimetric have more capability to map forest AGB.
For BC feature sets and C4 feature sets, over-estimated (Green in
Figure 10) and under-estimated samples (Red in
Figure 11) mainly focused on young and mature or over-mature forests, respectively. Thereby, the saturation phenomenon frequently occurs at the level of 250 t/ha. For the Ro feature set, the errors between predicted and ground-measured AGB are obviously decreased, and saturation levels are delayed (
Figure 10(a3,b3)). The results also confirmed that the rotated polarimetric feature set is more sensitive with forest AGB than other feature sets.
4.5. Results of Mapped Forest AGB with Combined Feature Sets
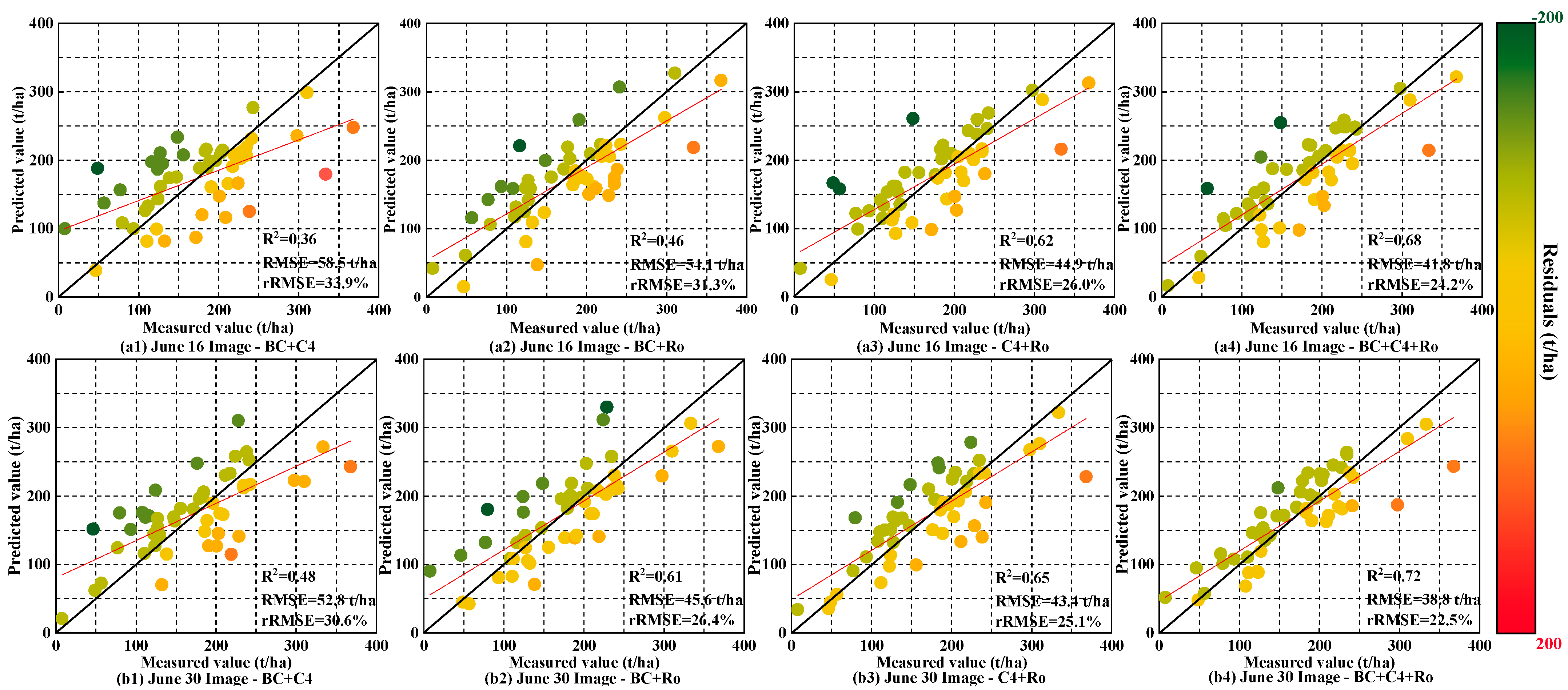
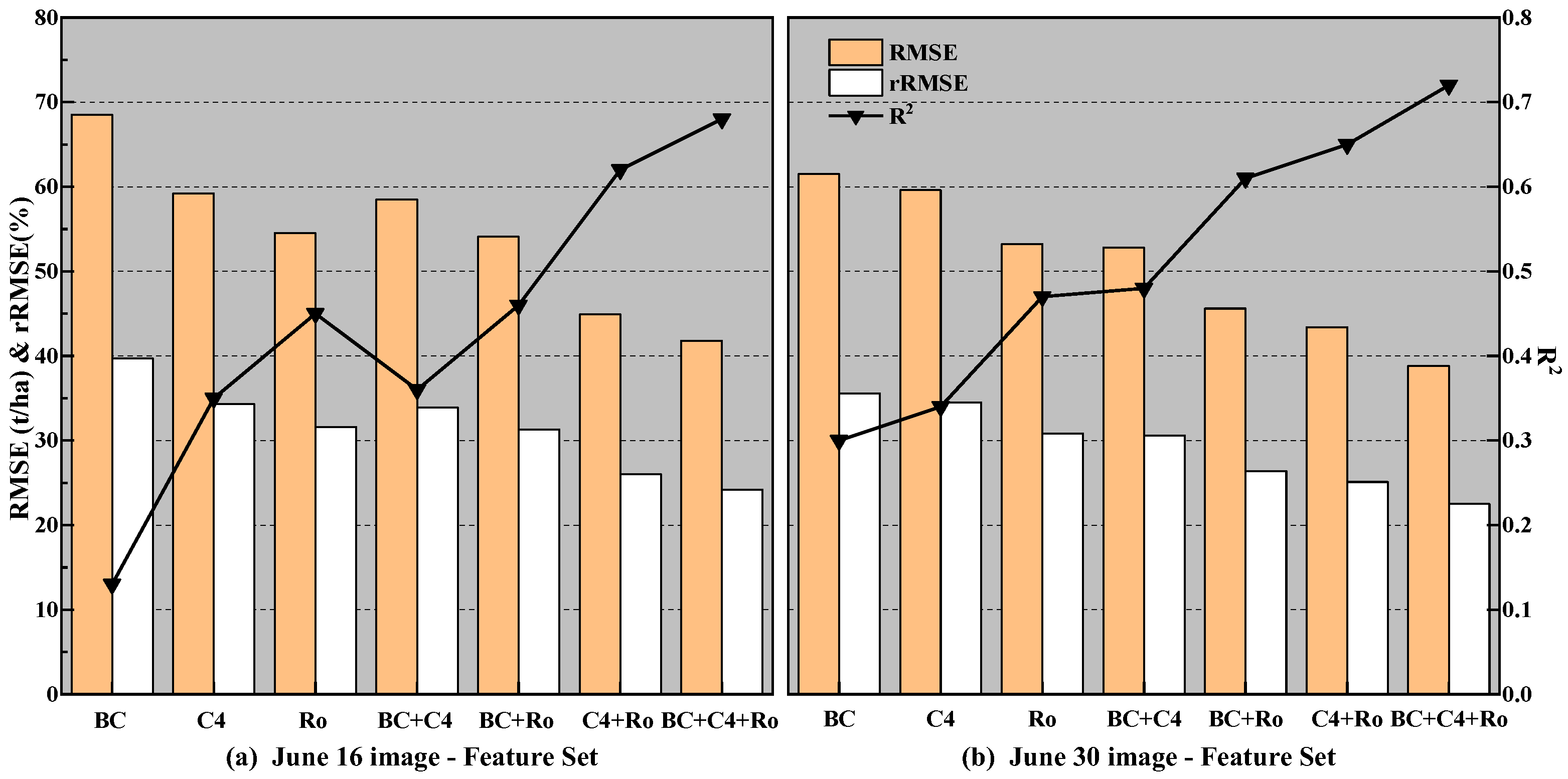
To further improve the accuracy of mapping forest AGB, several combined feature sets with different strategies were employed to obtain estimated AGB. In this study, four combined feature sets were formed with three categories of features, including BC + C4, BC + Ro, C4 + Ro, and BC + C4 + Ro. The forest AGBs were inverted using MLR and each combined feature set, and the results of the estimated forest AGB are listed in
Table 6.
Compared with the results in
Table 5, the accuracy of mapped forest AGB using combined feature sets is obviously higher than that using single feature set. The rRMSE values ranged from 24.2% to 33.9% for images acquired on 16 June, and from 22.5% to 30.6% for images acquired on 30 June, respectively, and the best result was obtained by BC + C4 + Ro for two images. To further analyze the mapped forest AGB, scatterplots between predicted and ground-measured AGB are shown in
Figure 11 and errors between predicted and ground-measured AGB are indicated by various colors.
Figure 11.
Scatterplots between predicted and ground-measured AGB using combined feature sets.
Figure 11.
Scatterplots between predicted and ground-measured AGB using combined feature sets.
It was found that the ranges of errors were decreased after using combined feature sets, and the number of samples with over-estimated or under-estimated results was obviously reduced, especially for the mapped forest AGB by BC + C4 + Ro in two images (
Figure 11(a4,b4)).
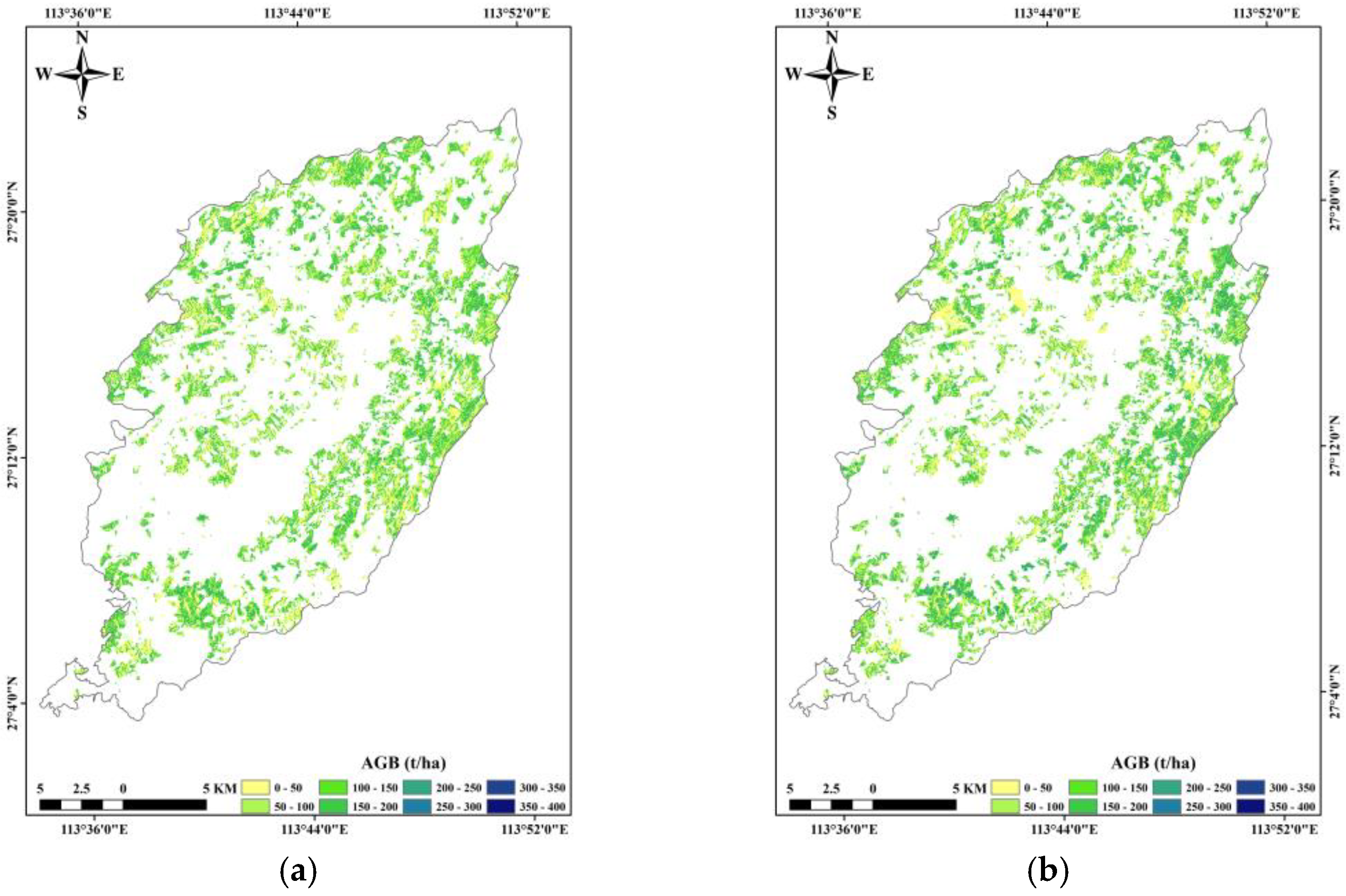
Figure 11 also illustrates that the saturation levels were alleviated to a large extent after using combined feature sets. It is inferred that different types of features extracted from quad-polarimetric SAR images have a better compensation effect and the accuracy of mapped forest AGB is significantly improved. Ultimately, the maps of forest AGB in two images were generated using MLR and combined feature sets (BC + C4 + Ro), and the results of mapped forest AGB are shown in
Figure 12. The results showed that mapped forest AGB ranged from 0 to 384.8 t/ha for images acquired on 16 June, and from 0 to 371.2 for images acquired on 30 June, respectively.



 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}