
Multimodal Feature-Assisted Continuous Driver Behavior Analysis and Solving for Edge-Enabled Internet of Connected Vehicles Using Deep Learning

 , , ,
, , ,  , and
, and
Abstract
:1. Introduction
1.1. Research Aim and Objectives
- High overhead: The huge volume of data processing in RSU increases the message overhead; the cloud-based computing environment that is used for warning message generation for driver behavior increases the latency in alert generation; the prevention of road traffic is not possible;
- Lack of optimum recommendation: Most of the existing works have focused on driver behavior analysis/prediction; however, if the behavior was abnormal, solving it was not discussed in the current research papers. Recommendations for solving abnormal behavior and reducing damage (economic loss, accidents to pedestrians and passengers (inside the vehicle), and health issues of driver) are lacking.
1.2. Research Contribution
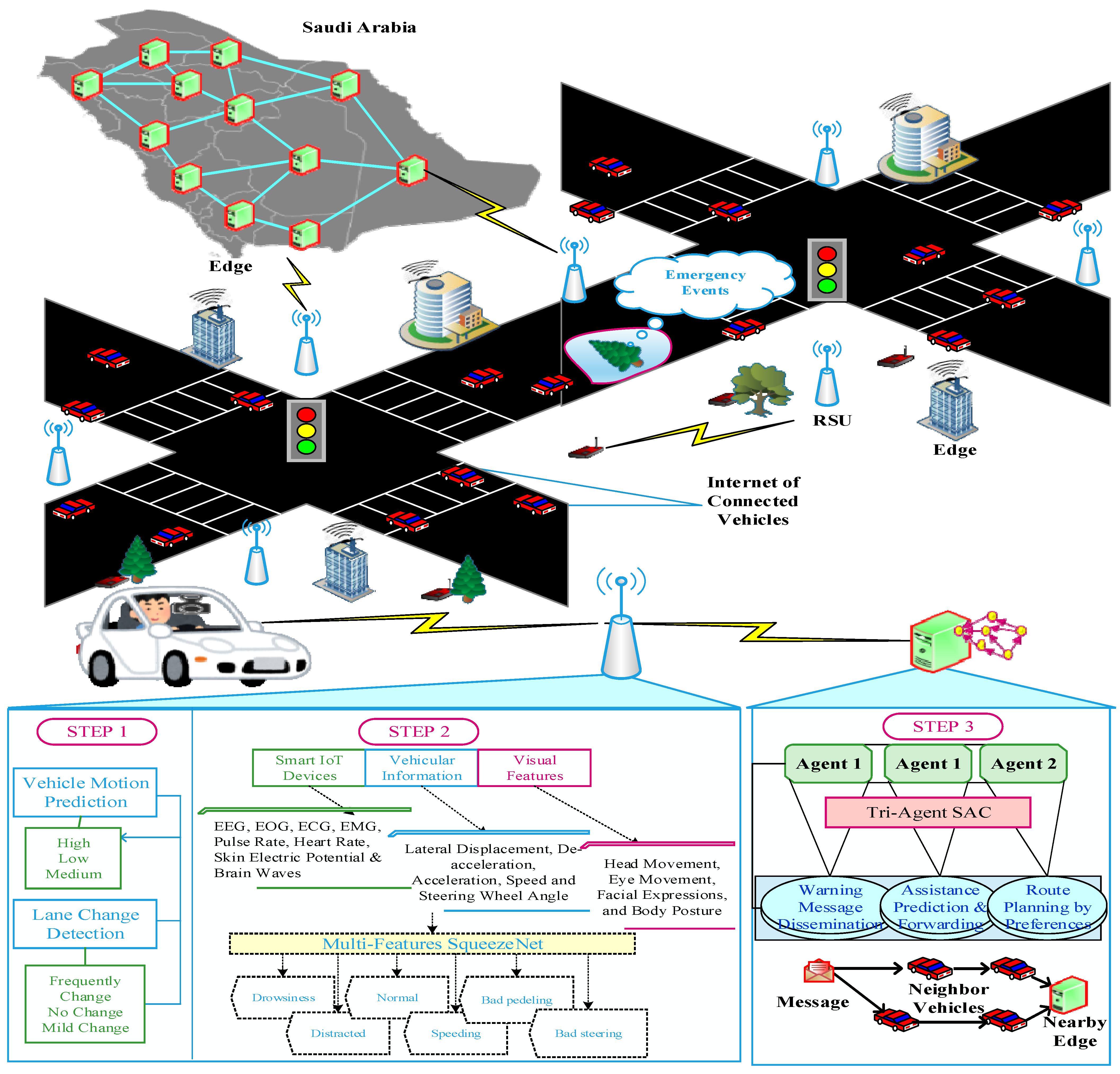
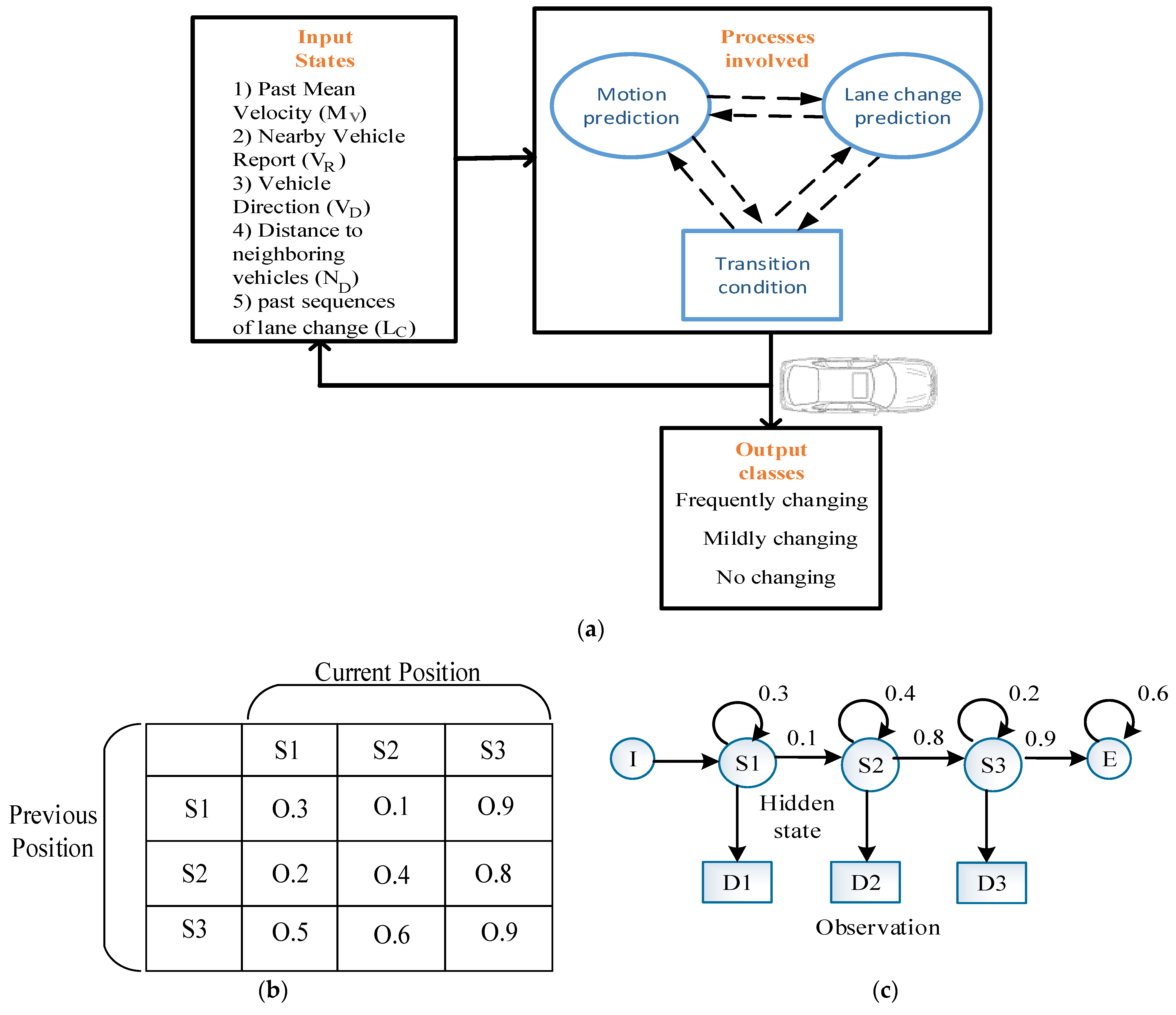
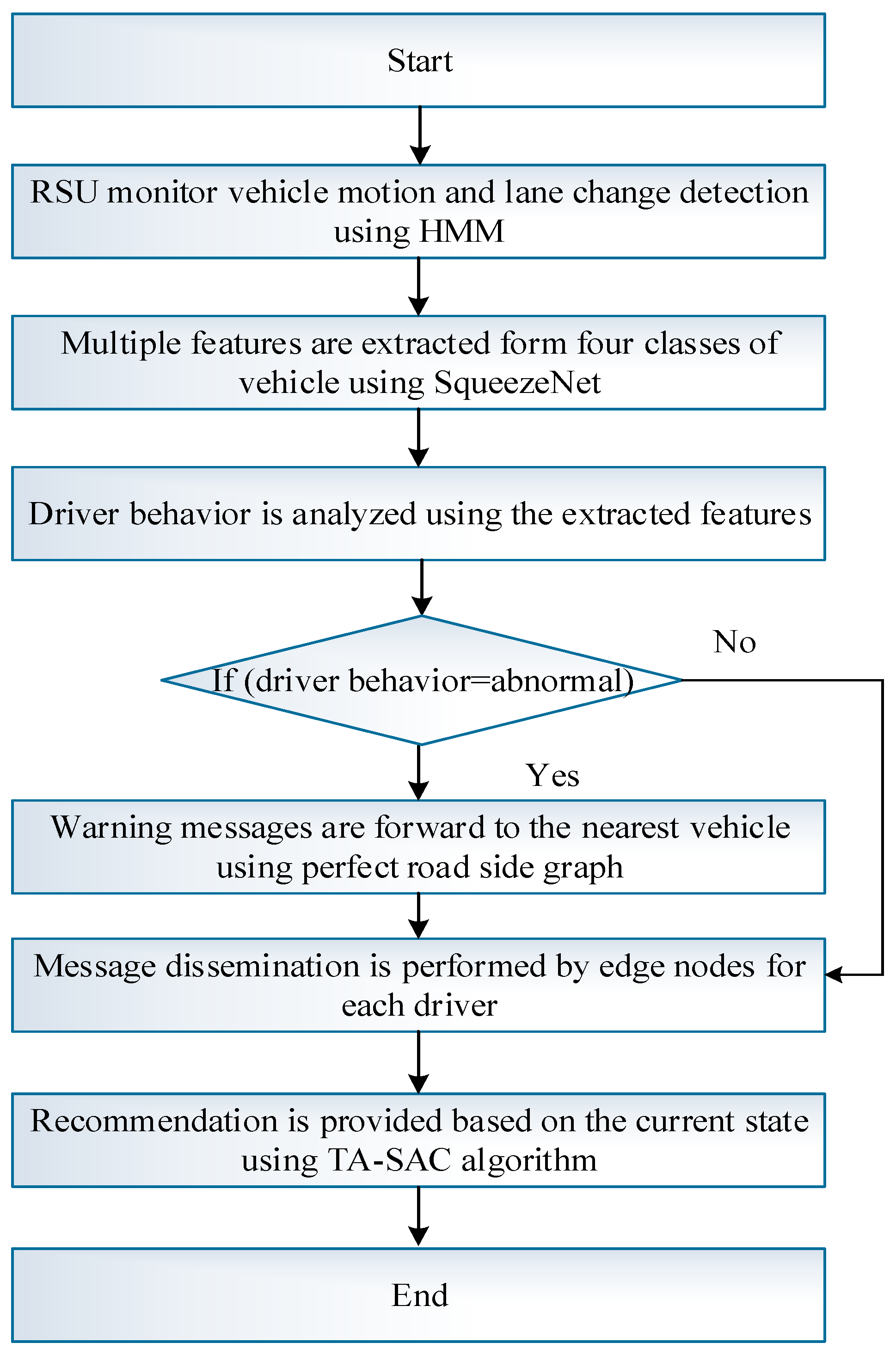
- Vehicle motion and lane change behaviors are predicted for improving the performance of feature extraction. For this, HMM is proposed in this paper. After completing vehicle motion and lane change detection, the HMM classifies them into three classes—namely, frequent change, no change, and mild change for improving the performance of the proposed MODAL-IoCV method;
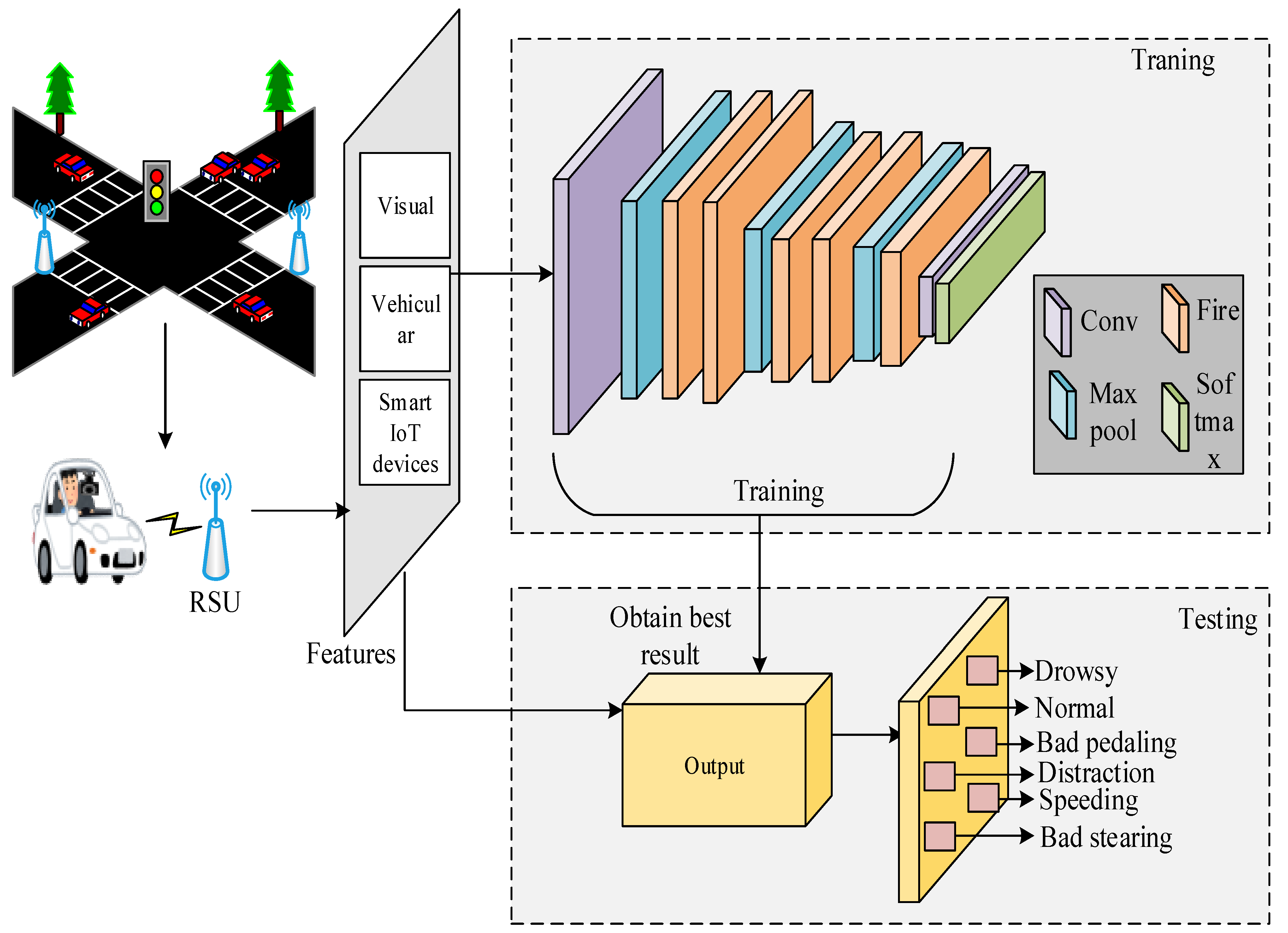
- Then, RSU extracts multiple features from four classes, which are provided by SqueezeNet, which is a lightweight model. It extracts three types of features, including visual features, vehicular features, and smart IoT device features, which increases the speed and accuracy of feature extraction compared to AlexNet;
- We construct a perfect roadside virtual graph by considering vehicle mobility speed, moving direction, and the distance between vehicles for broadcasting the warning messages to the nearby vehicles and roadside pedestrians, which helps to reduce the risk of accidents;
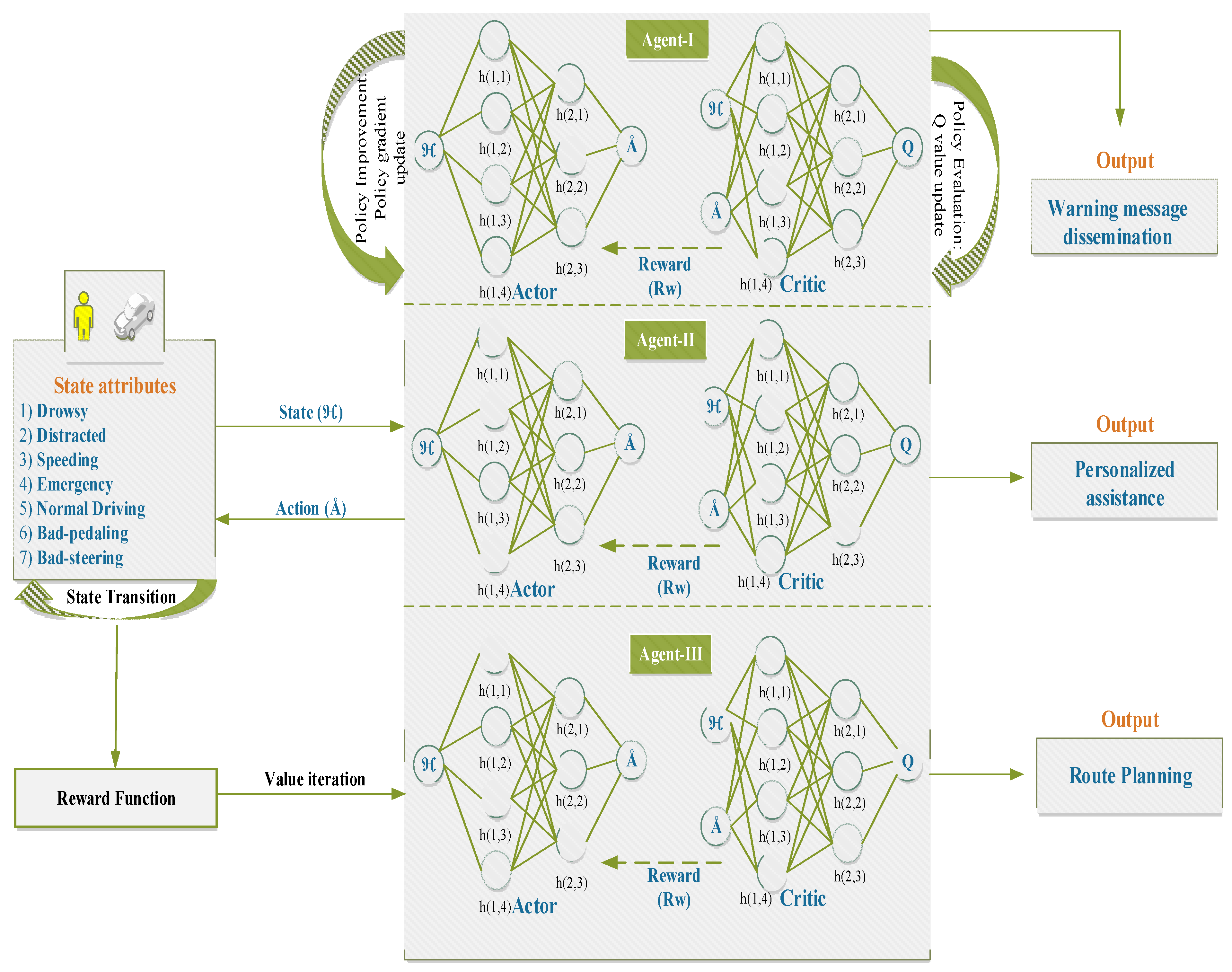
- Then, we provide a recommendation to the drivers by disseminating the message to each driver using edge nodes. This assistance is recommended based on the past and future behavior of the vehicles using the tri-agent-based soft actor critic (TA-SAC) algorithm. Here, three agents are utilized for driver behavior and this provides recommendations such as take a rest and drive defensively based on the current state. This increases the detection accuracy and prevention accuracy of the proposed MODAL-IoCV method.
1.3. Paper Organization
2. Related Work
3. Problem Statement
- The visual result of the environment (scenes by images) was considered and processed in DRN, but the weather information was not considered, which causes low accuracy in monitoring the driver’s behavior;
- System errors in modelling driver’s stress become very high due to the usage of the XGBoost algorithm, and training time is long compared to the Catboost and light GBM algorithms;
- Environmental and health status was not considered in this paper, which causes a higher risk of accidents and high economic damage. Lane change deviation is also taken into account for modelling the behavior of drivers;
- This paper does not discuss the alert messages for the personalized monitoring of drivers during driving. Hence, driver behavior modelling must be investigated using other significant parameters;
- CNN does not effectively handle all of the image features that are converted from signals, and behavior modelling takes a long amount of time to generate a prediction. This increases the chance of accidents and also does not ensure traffic safety through early alert message transmission.
- Vehicle motion, which measures lane change deviation using image processing techniques, is not a focus. Hence, it does not suit all types of drivers. High acceleration, continuous speeding, frequent lane changes, and large brakes must be considered to monitor the driver’s behavior;
- Dangerous drivers’ behavior is not classified, including drunk, distracted, and fatigued. Hence, the warning messages are not optimal in this case (i.e., decisions must be properly made and sent to the pedestrians and other roadside vehicles);
- Cloud-based driver behavior monitoring increases latency. It is not effective to monitor a large number of drivers’ behaviors to provide real-time warning message updates;
- The health (physiological) parameters of the driver are not considered, which are important in emergency situations. The lack of smart sensor deployment increases pandemic cases;
- Recommendations are not personalized for drivers, since environment parameters (events) and weather information are not considered, which causes low accuracy in the recommendations.
4. Proposed Work
- Layer 1 (IoCV)—This layer consists of intelligent vehicles that are connected with the internet. Each vehicle consists of sensors for monitoring speed, acceleration, etc. OBU also contains sensors which are equipped to capture vehicles’ information. This layer also consists of RSUs for data collection from vehicles.
- Layer 2 (Edge Computing)—This layer consists of a number of edges that are responsible for monitoring separate regions of layer 1. Each edge node has a processing capacity that is higher than cloud computing platforms. These two layers are functioned for accidents prevention and generate early warning alerts.
4.1. Data Gathering
4.2. Driving Vehicle Motion and Lane Change Detection
4.3. Multimodal Features-Based Driver Behavior Modelling
| Pseudocode 1: Visual features conditions |
|
| Pseudocode 2: Multimodal features-based driver behavior modelling |
|
4.4. Personalized Recommendation and Route Planning
- Agent 1: It is used to disseminate the warning messages to nearby vehicles and edges
- Agent 2: It is used to determine personalized assistance for behaviors according to the current state
- Agent 3: It is used for route planning according to the drivers’ preferences
| Pseudocode 3: TA-SAC algorithm |
|
5. Experimental Study
5.1. Simulation Study
5.2. Comparative Analysis
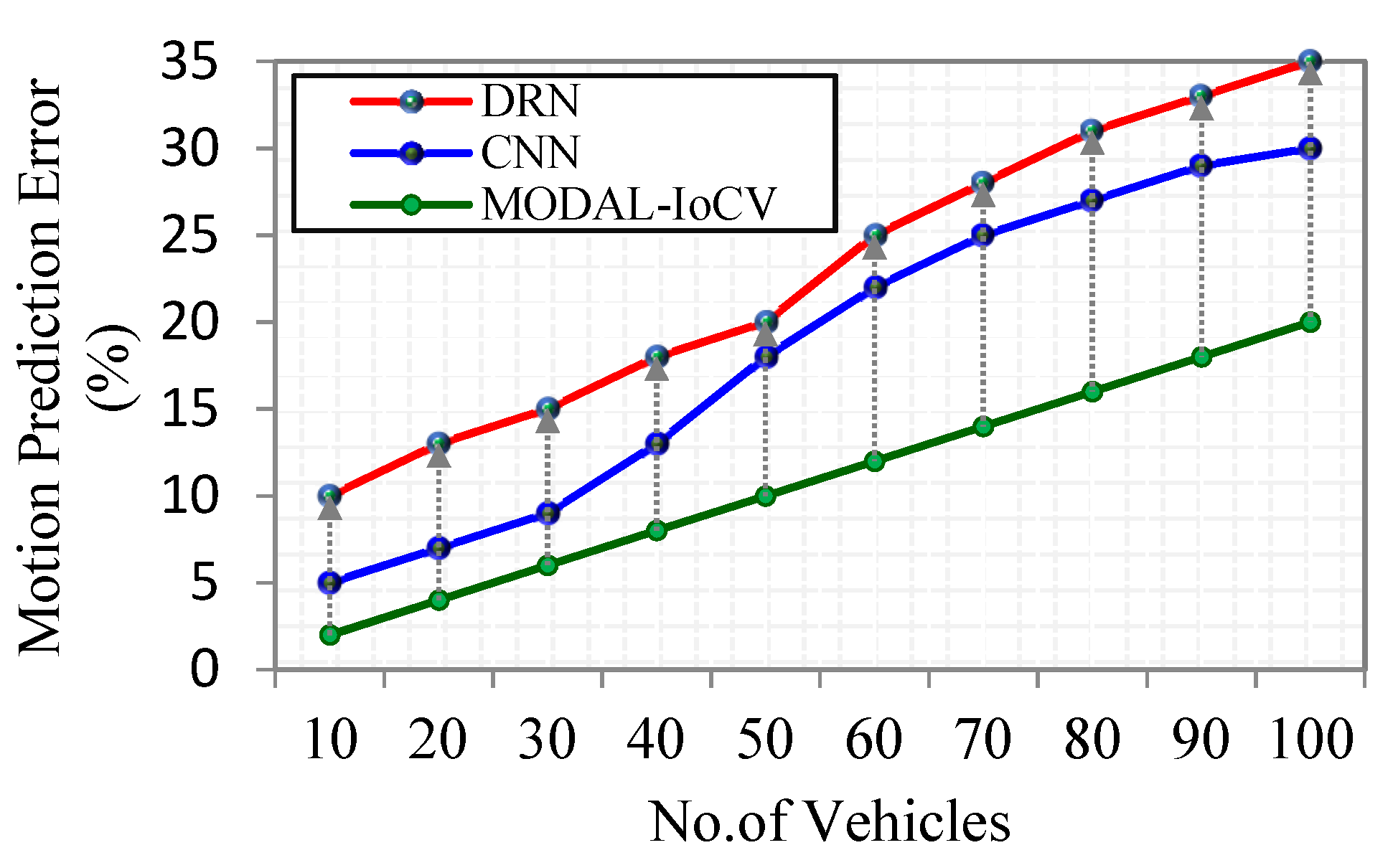
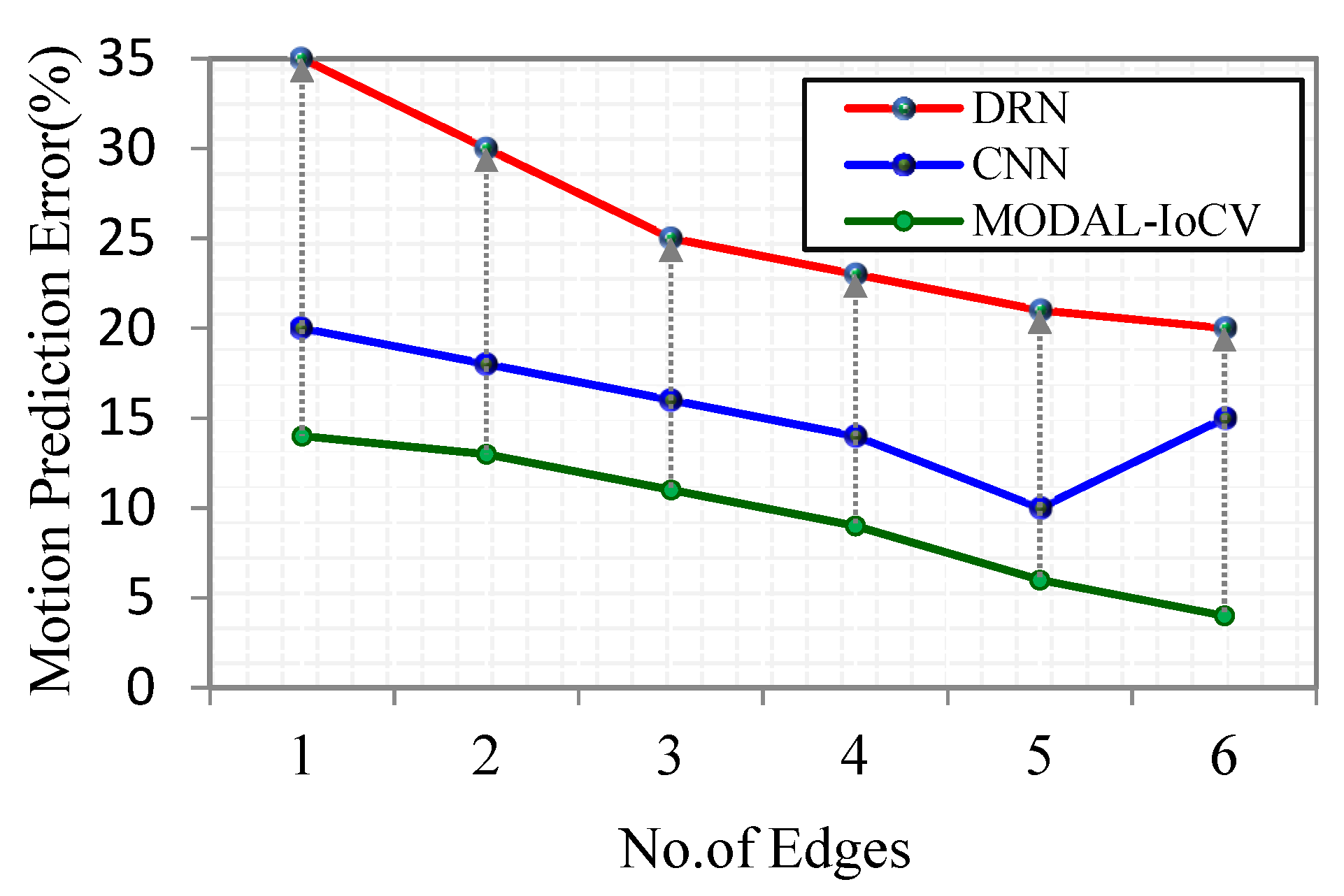
5.2.1. Impact of Motion Prediction Error
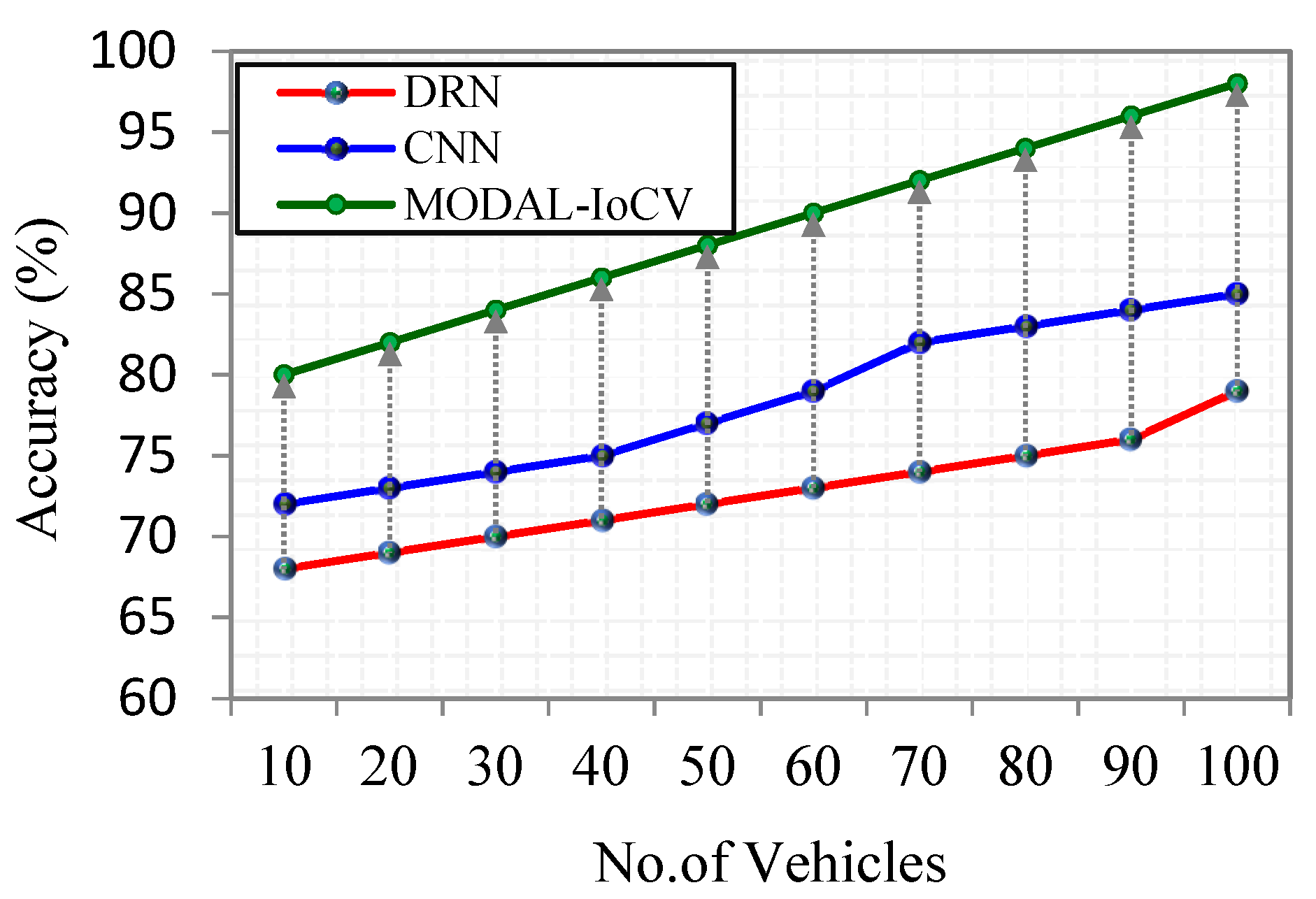
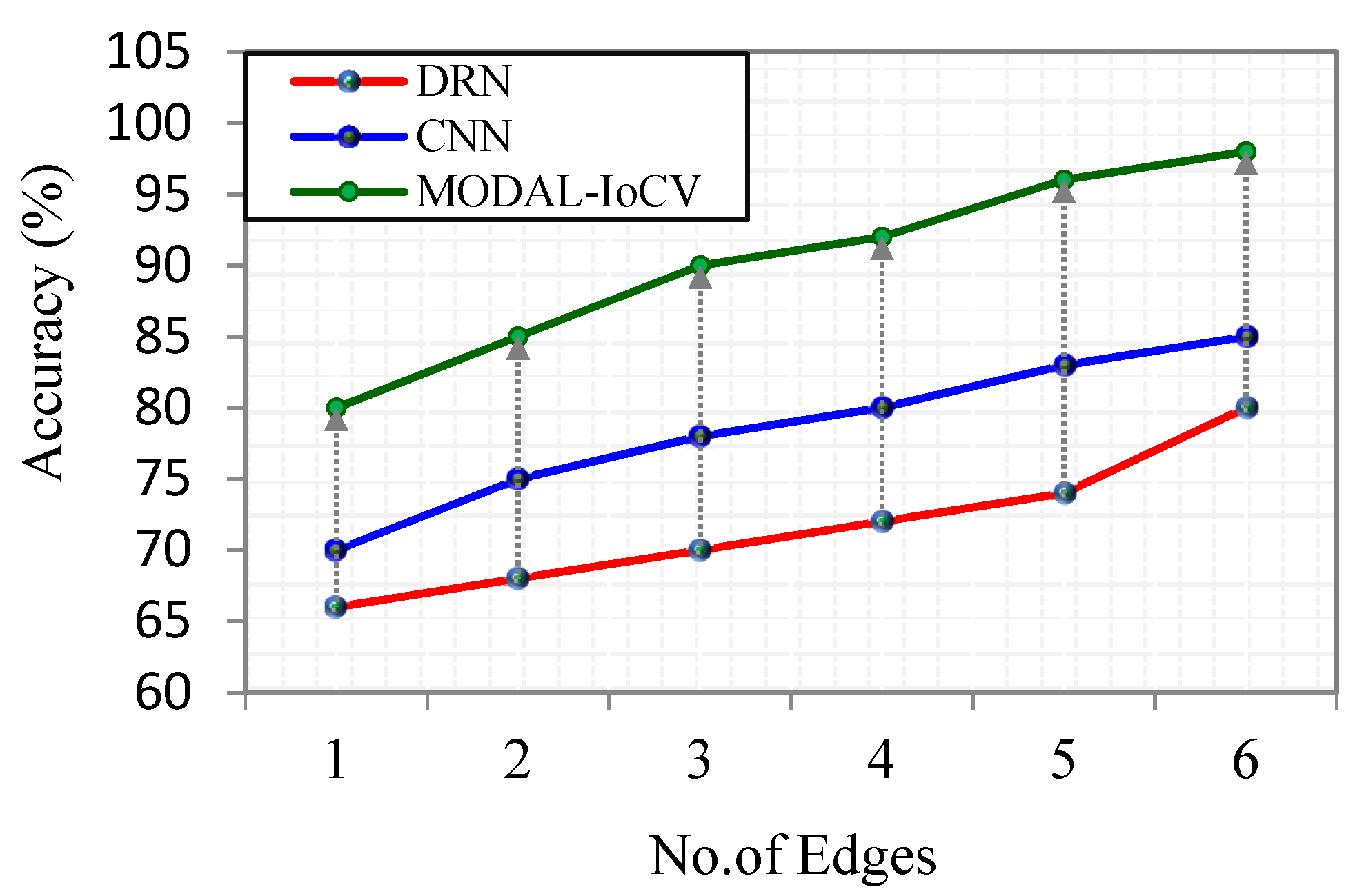
5.2.2. Impact of Accuracy
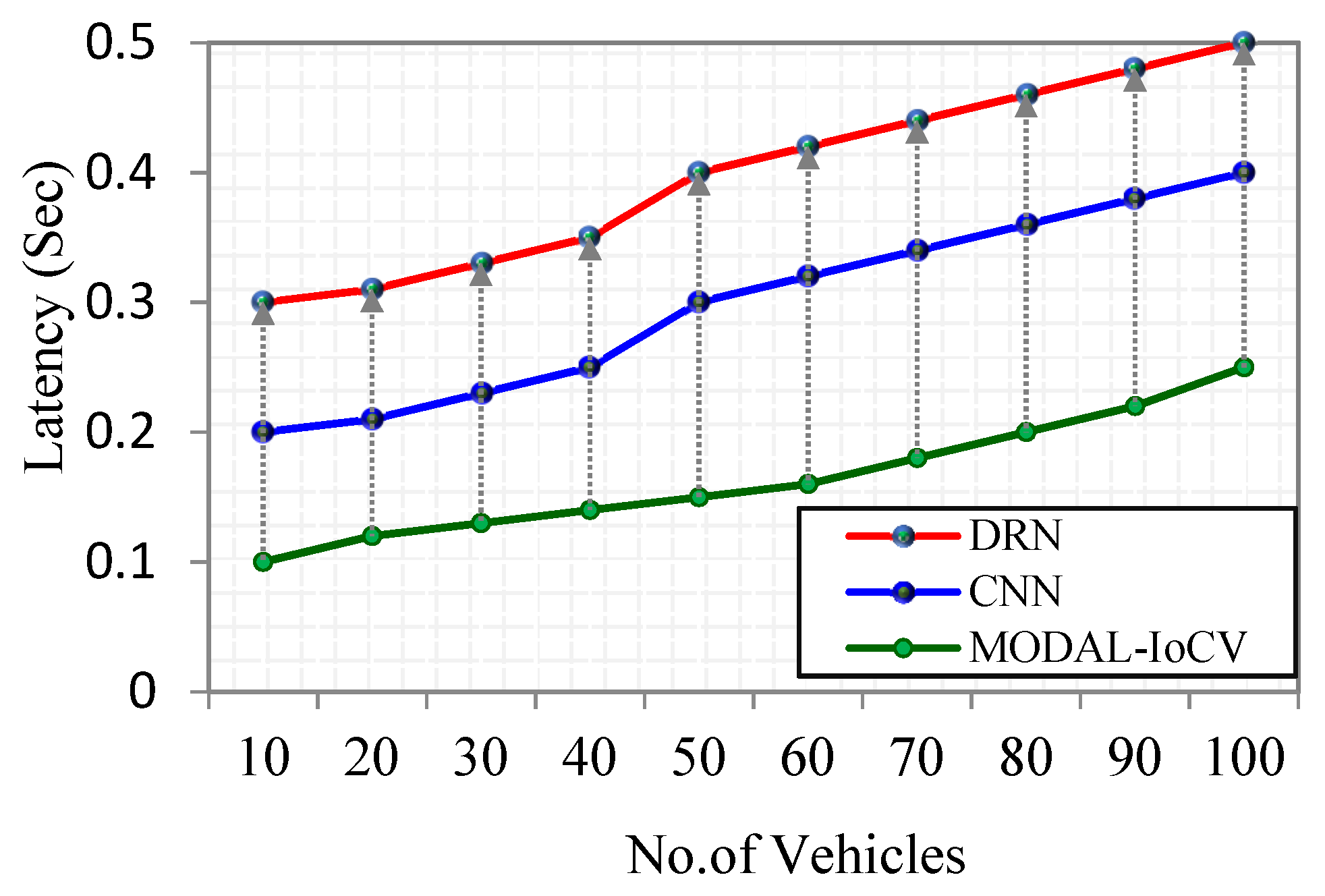
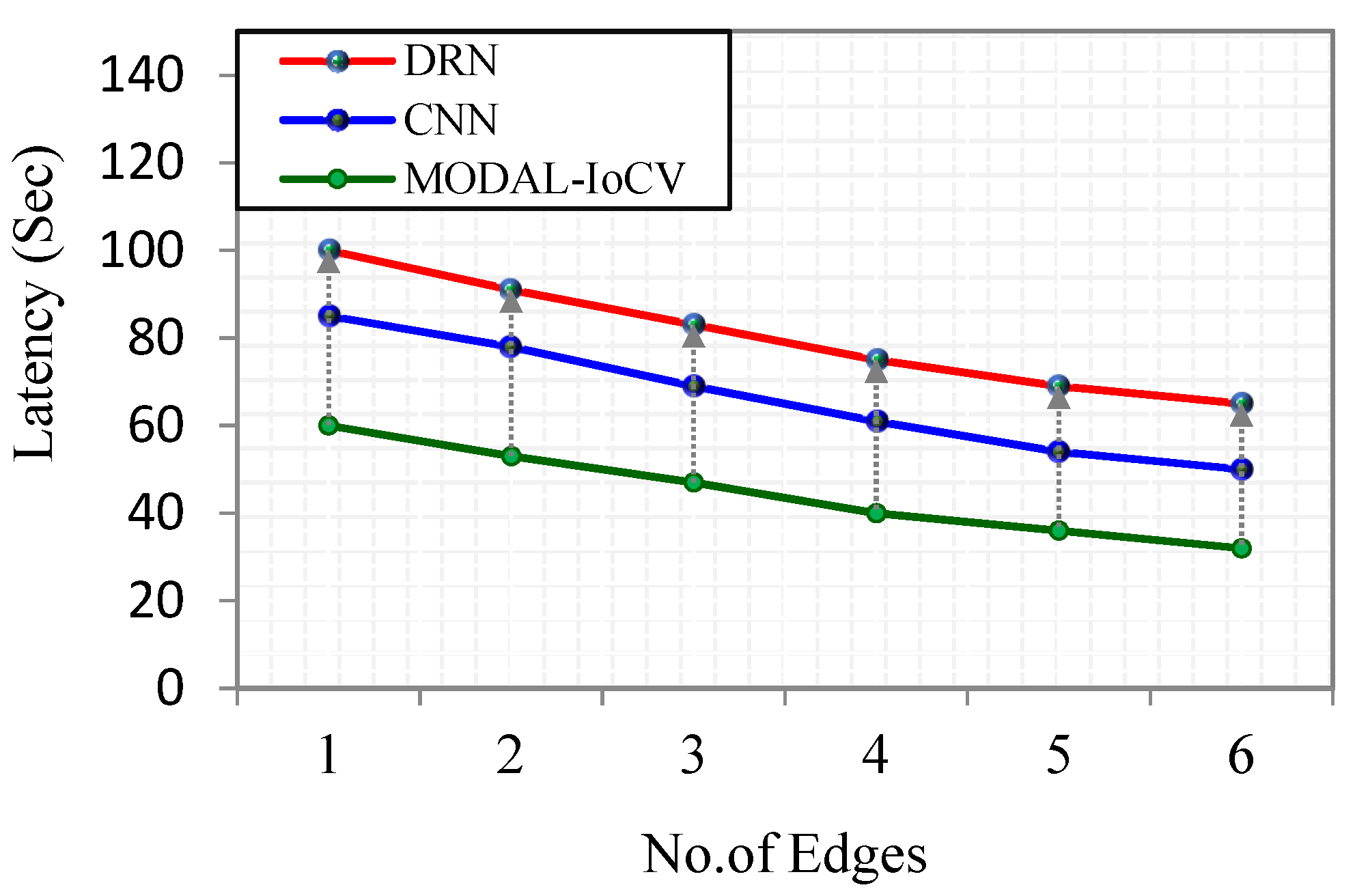
5.2.3. Impact of Latency
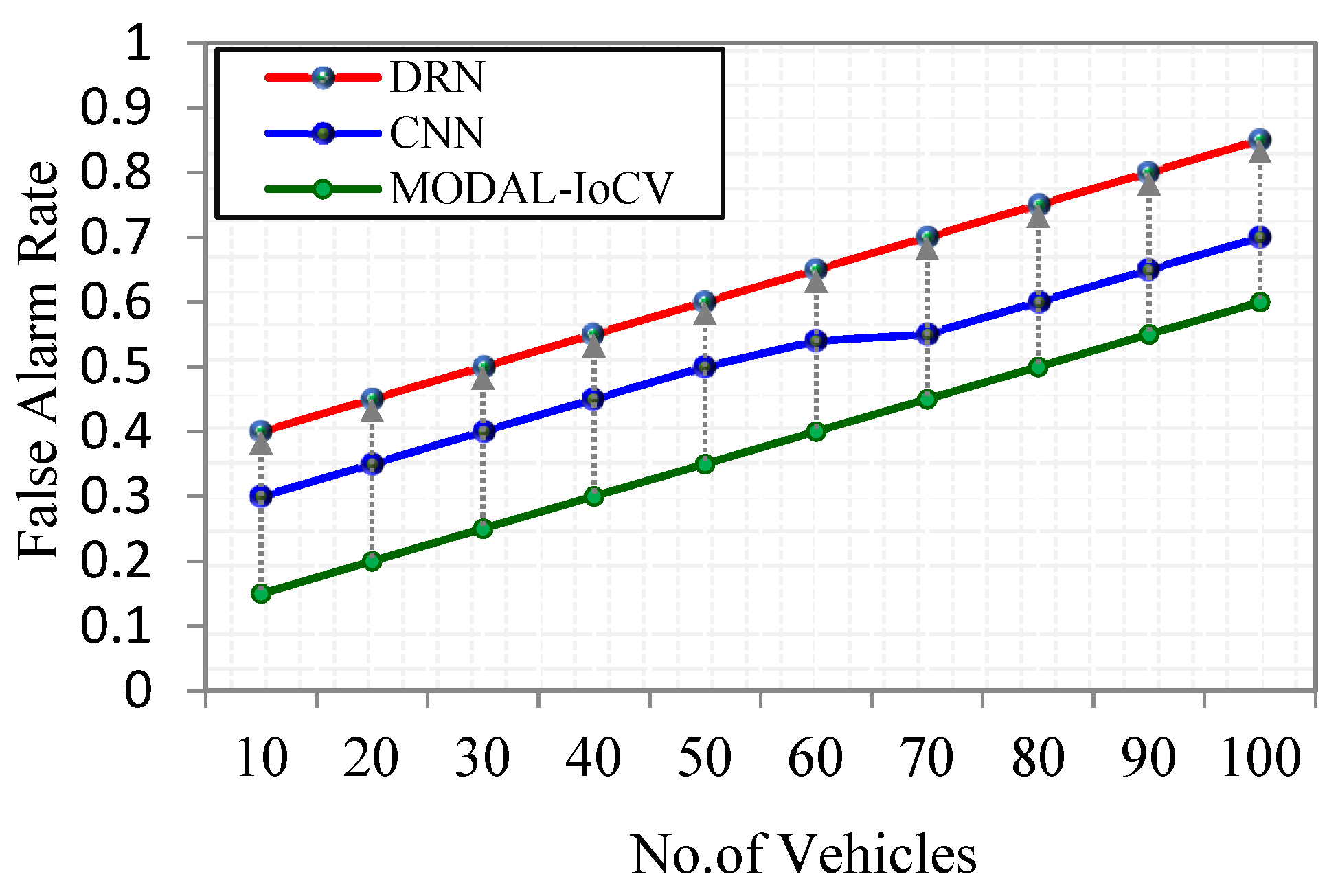
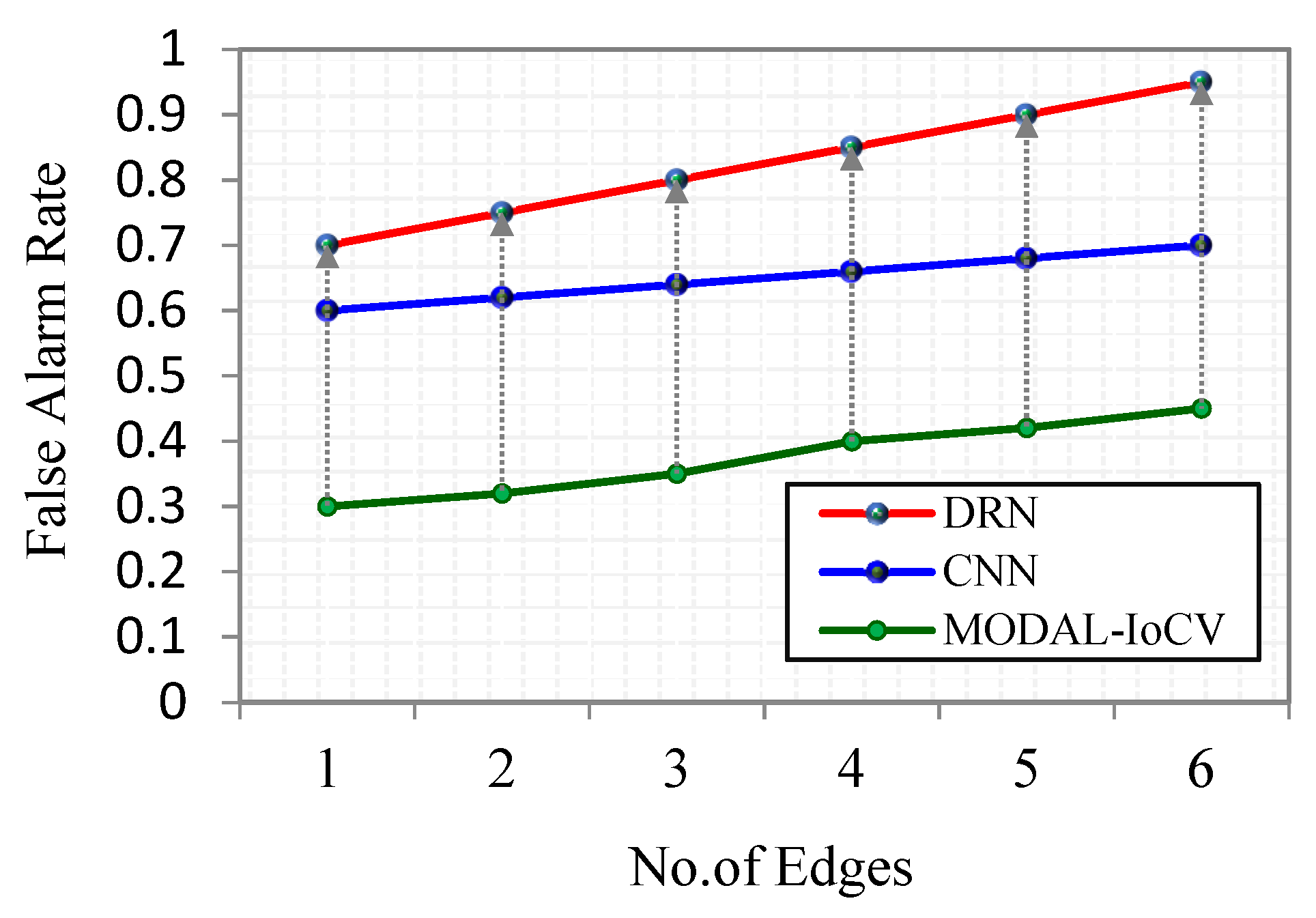
5.2.4. Impact of False Alarm Rate
6. Discussion Section
6.1. Discussion
6.2. Safety and Security Challenges
- Confidentiality, which is the property through which data is disclosed only as intended by the data owner;
- Integrity, which is the property guaranteeing that critical assets are not altered in disagreement with the owner’s wishes;
- Availability, which is the property according to which critical assets will be accessible when needed for authorized use;
- Accountability, which is the property according to which actions affecting critical assets can be traced to the actor or automated component responsible for the action.
7. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, X.; Wang, H. Driving Behavior Clustering for Hazardous Material Transportation Based on Genetic Fuzzy C-Means Algorithm. IEEE Access 2020, 8, 11289–11296. [Google Scholar] [CrossRef]
- Moghaddam, A.M.; Ghaffari, A.; Khodayari, A. Adaptive comfort-oriented vehicle lateral control with online controller adjustments according to driver behavior and look-ahead dynamics. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2020, 234, 272–287. [Google Scholar]
- Nassef, O.; Sequeira, L.; Salam, E.; Mahmoodi, T. Building a Lane Merge Coordination for Connected Vehicles Using Deep Reinforcement Learning. IEEE Internet Things J. 2021, 8, 2540–2557. [Google Scholar] [CrossRef]
- Le, D.T.; Dang, K.Q.; Nguyen, Q.L.T.; Alhelaly, S.; Muthanna, A. A Behavior-Based Malware Spreading Model for Vehicle-to-Vehicle Communications in VANET Networks. Electronics 2021, 10, 2403. [Google Scholar] [CrossRef]
- Mase, J.M.; Majid, S.; Mesgarpour, M.; Torres, M.T.; Figueredo, G.P.; Chapman, P. Evaluating the impact of Heavy Goods Vehicle driver monitoring and coaching to reduce risky behavior. Accid. Anal. Prev. 2020, 146, 105754. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Escano, J.M.; Ridao-Olivar, M.A.; Ierardi, C.; Sanchez, A.J.; Rouzbehi, K. Driver Behavior Soft-Sensor Based on Neurofuzzy Systems and Weighted Projection on Principal Components. IEEE Sens. J. 2020, 20, 11454–11462. [Google Scholar] [CrossRef]
- Alamri, A.; Gumaei, A.; Al-Rakhami, M.; Hassan, M.M.; Alhussein, M.; Fortino, G. An Effective Bio-Signal-Based Driver Behavior Monitoring System Using a Generalized Deep Learning Approach. IEEE Access 2020, 8, 135037–135049. [Google Scholar] [CrossRef]
- Wu, R.; Zheng, X.; Xu, Y.; Wu, W.; Li, G.; Xu, Q.; Nie, Z. Modified Driving Safety Field Based on Trajectory Prediction Model for Pedestrian–Vehicle Collision. Sustainability 2019, 11, 6254. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Wang, F.; Ke, H.; Wang, L.-L.; Xu, C.-C. A Driver’s Physiology Sensor-Based Driving Risk Prediction Method for Lane-Changing Process Using Hidden Markov Model. Sensors 2019, 19, 2670. [Google Scholar] [CrossRef] [Green Version]
- Parra, A.; Rodriguez, A.J.; Zubizarreta, A.; Perez, J. Validation of a Real-Time Capable Multibody Vehicle Dynamics Formulation for Automotive Testing Frameworks Based on Simulation. IEEE Access 2020, 8, 213253–213265. [Google Scholar] [CrossRef]
- Ortega, J.D.; Kose, N.; Cañas, P.; Chao, M.-A.; Unnervik, A.; Nieto, M.; Otaegui, O.; Salgado, L. DMD: A Large-Scale Multi-modal Driver Monitoring Dataset for Attention and Alertness Analysis. Adv. Auton. Robot. 2020, 18, 387–405. [Google Scholar] [CrossRef]
- Hong, Z.; Chen, Y.; Wu, Y. A driver behavior assessment and recommendation system for connected vehicles to produce safer driving environments through a “follow the leader” approach. Accid. Anal. Prev. 2020, 139, 105460. [Google Scholar] [CrossRef]
- Terán, J.; Navarro, L.; Quintero M., C.G.; Pardo, M. Intelligent Driving Assistant Based on Road Accident Risk Map Analysis and Vehicle Telemetry. Sensors 2020, 20, 1763. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Blackman, R.; Legge, M.; Debnath, A.K. Comparison of Three Traffic Management Plans Showing Shadow and Police Vehicle Effects on Driver Behavior at Highway Single Lane Closures. Transp. Res. Rec. J. Transp. Res. Board 2020, 2674, 15–25. [Google Scholar] [CrossRef]
- Zahid, M.; Chen, Y.; Jamal, A.; Al-Ofi, K.A.; Al-Ahmadi, H.M. Adopting Machine Learning and Spatial Analysis Techniques for Driver Risk Assessment: Insights from a Case Study. Int. J. Environ. Res. Public Health 2020, 17, 5193. [Google Scholar] [CrossRef]
- Leng, J.; Liu, Y.; Du, D.; Zhang, T.; Quan, P. Robust Obstacle Detection and Recognition for Driver Assistance Systems. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1560–1571. [Google Scholar] [CrossRef]
- Zahabi, M.; Razak, A.M.A.; Shortz, A.E.; Mehta, R.K.; Manser, M. Evaluating advanced driver-assistance system trainings using driver performance, attention allocation, and neural efficiency measures. Appl. Ergon. 2020, 84, 103036. [Google Scholar] [CrossRef]
- Wickramanayake, S.; Bandara, H.M.; Samarasekara, N.A. Real-Time Monitoring and Driver Feedback to Promote Fuel Efficient Driving. arXiv Prepr. 2020, arXiv:2007.02728. [Google Scholar]
- Ullah, S.; Abbas, G.; Abbas, Z.H.; Waqas, M.; Ahmed, M. RBO-EM: Reduced Broadcast Overhead Scheme for Emergency Message Dissemination in VANETs. IEEE Access 2020, 8, 175205–175219. [Google Scholar] [CrossRef]
- Wang, R.; Xie, F.; Zhao, J.; Zhang, B.; Sun, R.; Yang, J. Smartphone Sensors-Based Abnormal Driving Behaviors Detection: Serial-Feature Network. IEEE Sens. J. 2021, 21, 15719–15728. [Google Scholar] [CrossRef]
- Messaoud, K.; Yahiaoui, I.; Verroust-Blondet, A.; Nashashibi, F. Attention Based Vehicle Trajectory Prediction. IEEE Trans. Intell. Veh. 2021, 6, 175–185. [Google Scholar] [CrossRef]
- Huang, C.; Wang, X.; Cao, J.; Wang, S.; Zhang, Y. HCF: A Hybrid CNN Framework for Behavior Detection of Distracted Drivers. IEEE Access 2020, 8, 109335–109349. [Google Scholar] [CrossRef]
- Kim, W.; Lee, Y.-K.; Jung, W.-S.; Yoo, D.; Kim, D.-H.; Jo, K.-H. An Adaptive Batch-Image Based Driver Status Monitoring System on a Lightweight GPU-Equipped SBC. IEEE Access 2020, 8, 206074–206087. [Google Scholar] [CrossRef]
- Peng, L.; Sotelo, M.A.; He, Y.; Ai, Y.; Li, Z. Rough Set Based Method for Vehicle Collision Risk Assessment Through Inferring Driver’s Braking Actions in Near-Crash Situations. IEEE Intell. Transp. Syst. Mag. 2019, 11, 54–69. [Google Scholar] [CrossRef]
- Davoli, L.; Martalò, M.; Cilfone, A.; Belli, L.; Ferrari, G.; Presta, R.; Montanari, R.; Mengoni, M.; Giraldi, L.; Amparore, E.G.; et al. On Driver Behavior Recognition for Increased Safety: A Roadmap. Safety 2020, 6, 55. [Google Scholar] [CrossRef]
- Lobo, A.; Ferreira, S.; Couto, A. Exploring Monitoring Systems Data for Driver Distraction and Drowsiness Research. Sensors 2020, 20, 3836. [Google Scholar] [CrossRef] [PubMed]
- Abbas, Q.; Alsheddy, A. Driver Fatigue Detection Systems Using Multi-Sensors, Smartphone, and Cloud-Based Computing Platforms: A Comparative Analysis. Sensors 2020, 21, 56. [Google Scholar] [CrossRef]
- Bichicchi, A.; Belaroussi, R.; Simone, A.; Vignali, V.; Lantieri, C.; Li, X. Analysis of Road-User Interaction by Extraction of Driver Behavior Features Using Deep Learning. IEEE Access 2020, 8, 19638–19645. [Google Scholar] [CrossRef]
- Kashevnik, A.; Lashkov, I.; Gurtov, A. Methodology and Mobile Application for Driver Behavior Analysis and Accident Prevention. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2427–2436. [Google Scholar] [CrossRef]
- Pawar, N.; Khanuja, R.K.; Choudhary, P.; Velaga, N.R. Modelling braking behavior and accident probability of drivers under increasing time pressure conditions. Accid. Anal. Prev. 2019, 136, 105401. [Google Scholar] [CrossRef] [PubMed]
- Wan, Q.; Peng, G.; Li, Z.; Inomata, F.; Zheng, Y.; Liu, Q. Using Asymmetric Theory to Identify Heterogeneous Drivers’ Behavior Characteristics Through Traffic Oscillation. IEEE Access 2019, 7, 106284–106294. [Google Scholar] [CrossRef]
- Lu, Y.; Fu, X.; Guo, E.; Tang, F. XGBoost Algorithm-Based Monitoring Model for Urban Driving Stress: Combining Driving Behavior, Driving Environment, and Route Familiarity. IEEE Access 2021, 9, 21921–21938. [Google Scholar] [CrossRef]
- Shahverdy, M.; Fathy, M.; Berangi, R.; Sabokrou, M. Driver behavior detection and classification using deep convolutional neural networks. Expert Syst. Appl. 2020, 149, 113240. [Google Scholar] [CrossRef]
- Kashevnik, A.; Lashkov, I.; Ponomarev, A.; Teslya, N.; Gurtov, A. Cloud-Based Driver Monitoring System Using a Smartphone. IEEE Sens. J. 2020, 20, 6701–6715. [Google Scholar] [CrossRef]
- Chen, L.-W.; Chen, H.-M. Driver Behavior Monitoring and Warning With Dangerous Driving Detection Based on the Internet of Vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 1–10. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Existing Work | Problems Addressed | Proposed Solutions |
|---|---|---|
| [33] |
|
|
| [34] |
|
|
| [35] |
|
|
| [36] |
|
|
| Feature Type | Feature Name | Range |
|---|---|---|
| Smart IoT device | Pulse range | 50–110 (ppm) |
| Rhythm | yes | |
| Respiratory rate | 12–20 (bpm) | |
| ST elevation | 0.13 | |
| Q wave | 0.15 | |
| EEG range | 8–13 Hz | |
| ST depression | 0.16 | |
| Vehicular | Moving direction | (North, South, East, West) |
| Position | (Latitude, Longitude) | |
| Longitudinal acceleration | ||
| Speed | 40-0 km | |
| Rate of yaw angle |
| Attribute Type | Attribute | Description | |
|---|---|---|---|
| Driver behavior | Boolean (0-no, 1-yes) | Brake Switch | Keep constant Acceleration Deceleration Steering |
| Boolean (0-no, 1-yes) | Acc Pedal | ||
| Boolean (0-no, 1-yes) | Turn indicator | ||
| Road obstacles | Continuous | Obstacles in longitudinal direction | Calculated by TTC and classified into 3 levels 1>5, 2=1–5 3=0–2 |
| Kinematic status of vehicle | Continuous | Velocity | Calculate by km/h and classified into 4 levels 1=0–40, 2=41–50, 3=51–60,4=>60 |
| Name of the Layer | Filters | Depth | Output Size |
|---|---|---|---|
| Conv 1 | 1 | 96 | |
| Maxpool 1 | /2 | 0 | 96 |
| Fire 2 | - | 2 | 128 |
| Fire 3 | - | 2 | 128 |
| Fire 4 | - | 2 | 256 |
| Maxpool 4 | /2 | 0 | 256 |
| Fire 5 | - | 2 | 256 |
| Fire 6 | - | 2 | 384 |
| Fire 7 | - | 2 | 384 |
| Fire 8 | - | 2 | 512 |
| Maxpool 8 | 3/2 | 0 | 512 |
| Fire 9 | - | 2 | 512 |
| Conv 10 | 1 | 1000 | |
| Avgpool 10 | /1 | 0 | 1000 |
| Software Requirements | Network simulator | OMNET++ |
| Traffic simulator | SUMO | |
| OS | Ubuntu | |
| Hardware requirements | RAM | 8 GB |
| CPU | 2.90 GHZ | |
| Hard disk | 1 TB | |
| Processor | Intel core |
| PARAMETERS | DESCRIPTION |
|---|---|
| Network Parameters | |
| Area of simulation | 500 × 500 m |
| Simulation time | 300 s |
| Number of RSUs | 4 |
| Number of Edge nodes | 6 |
| Number of cloud node | 1 |
| Number of vehicles | 100 |
| Type of traffic | Traffic control interface model |
| Rate of transmission | 200 Mbps |
| Range of transmission | 200–250 m |
| Transport protocol | TCP |
| Size of packet | 512 bytes |
| Total number of packets | 10,000 (approx.) |
| Mobility model | Random way point |
| Performance Metrics | Scenario | Proposed and Existing Approaches | ||
|---|---|---|---|---|
| DRN | CNN | MODAL-IoCV | ||
| Accuracy (%) | #of vehicles | |||
| #of edges | ||||
| Latency (Sec) | #of vehicles | |||
| #of edges | ||||
| Motion prediciton error (%) | #of vehicles | |||
| #of edges | ||||
| False alarm rate | #of vehicles | |||
| #of edges | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aboulola, O.; Khayyat, M.; Al-Harbi, B.; Muthanna, M.S.A.; Muthanna, A.; Fasihuddin, H.; Alsulami, M.H. Multimodal Feature-Assisted Continuous Driver Behavior Analysis and Solving for Edge-Enabled Internet of Connected Vehicles Using Deep Learning. Appl. Sci. 2021, 11, 10462. https://0-doi-org.brum.beds.ac.uk/10.3390/app112110462
Aboulola O, Khayyat M, Al-Harbi B, Muthanna MSA, Muthanna A, Fasihuddin H, Alsulami MH. Multimodal Feature-Assisted Continuous Driver Behavior Analysis and Solving for Edge-Enabled Internet of Connected Vehicles Using Deep Learning. Applied Sciences. 2021; 11(21):10462. https://0-doi-org.brum.beds.ac.uk/10.3390/app112110462
Chicago/Turabian StyleAboulola, Omar, Mashael Khayyat, Basma Al-Harbi, Mohammed Saleh Ali Muthanna, Ammar Muthanna, Heba Fasihuddin, and Majid H. Alsulami. 2021. "Multimodal Feature-Assisted Continuous Driver Behavior Analysis and Solving for Edge-Enabled Internet of Connected Vehicles Using Deep Learning" Applied Sciences 11, no. 21: 10462. https://0-doi-org.brum.beds.ac.uk/10.3390/app112110462