3.1. Considerations and Functioning
In order to provide the reader with a complete idea regarding the analysis of the invention, it is necessary to explain its operation.
Figure 2 and
Figure 3 present plans of the ensemble with an indicative list of its elements therein, which serve to illustrate the operation of the mechanism.
The machine requires certain initial adjustments prior to use. The first of these involves its transport to the place of reaping, for which it has two removable transport wheels placed on their corresponding supports (27), one on each side of said machine, which facilitate the transfer in a simple way.
Once located ready for reaping, the desired cutting-height adjustments are made. The height of cut adjustment is easily carried out, since both the drive wheel (25) and the drag wheel (5) of the machine are equipped with an independent height regulator that enables the straightforward adjustment of both wheels. Both the height-adjustment system of the drive wheel (37) and that of the drag wheel (30) work in the same way, consisting of a rack-and-pinion system, whereby turning the pinion generates a displacement of the rack, thus achieving a vertical movement of the corresponding wheel.
Once all these adjustments have been made, the transport wheels have been removed, and the animals hauling the machine have been harnessed, then the reaping can begin. To this end, the operator sits in the operator seat (35) from where the different adjustments in operation can be controlled by means of various levers. In this way, the height of the cutting pushers (4) can be adjusted via the first lever (10), and, by means of a second lever (11), these pushers can be moved forwards and backwards, and hence this cutting system is regulated in both height and depth. Furthermore, there is a third lever (12) that can regulate the size of the sheaves to be bound and, also, by means of a fourth lever (13), the inclination of the blades with respect to the ground can be adjusted. These four levers, together with a fifth that acts on the main clutch (38) of the machine, are the controls available to the operator to carry out this work optimally.
The main clutch (38) is in charge of transmitting the movement, generated by the drive wheel (25) driven by the draft of the animals, to the rest of the machine’s transmission systems, in addition to allowing this movement to be decoupled as desired. These transmission systems all start from a main chain transmission system.
There are three principal systems: the cutting and rotary pusher system, the conveyor and lifting system of the reaped product, and the compacting and knotting system for sheaves, all of which are moved by a series of sprockets, chains, and gearboxes, which allow all systems to work in perfect synchronicity. Initially, the draft of the animals displaces the harvester by making it roll on its drive wheel (25), which converts this translational movement into a rotational movement. This movement is, in turn, transmitted to the main clutch (38) via a chain. In the event that said clutch is engaged, it will transmit the rotation to its associated shaft, thereby rotating the crown of the cutting-system gearbox (40). This gearbox consists of a group of bevel gears, which converts the rotational motion of the input to another rotational motion perpendicular to the input. This new turning movement is responsible for moving the blades in the cutting system and for transferring the energy of rotation to the other elements through chain sprocket 2 (41).
In turn, chain sprocket 2 (41) is responsible for moving the remaining sprockets through a chain (43) that wraps around all the sprockets with the help of tensioning sprockets (39) so that there is no interference from said chain with any other element of the machine. By rotating chain sprocket 1 (36), the reception conveyor (31) is hauled. Said transport consists of two wooden rollers, one of them fixed and associated with chain sprocket 1, and another idle roller, which is associated to a conveyor tension system (32), which allows the belt to be tensioned uniformly, and thus achieve its correct centering. When chain sprocket 4 rotates (47), the lower rise conveyor (34) is pulled and, in turn, so is the upper rise conveyor (33) but in the opposite direction of rotation through a conveyor-system gearbox (28) placed on the opposite side to said chain sprocket.
With these movements of the conveyors, the reaped product that falls onto the reception conveyor (31) is therefore moved towards the rise conveyors (33 and 34), which are located one above the other, with opposite directions of rotation, to guide them towards the compacting and knotting system. Furthermore, the machine has a bumper guard 1 (8) on the reception conveyor, which prevents the reaped product from slipping off said conveyor due to the drive of the cutting pushers. Likewise, it has another bumper guard 2 (14) that prevents the product from overflowing onto the knotting system.
In addition to transferring the rotational movement from one transport to another, the conveyor-system gearbox (28) also has a rotary outlet perpendicular to the input shaft. This outlet is employed to carry out an oscillatory movement for the sheaf framer (26) by means of a connecting rod/crank system and also allows the rotation to be transmitted to the cutting-system pusher (4).
To this end, the conveyor-system gearbox (28) transfers the rotational movement to the pusher gearbox (29) through a shaft with two gimbal joints on each side, to absorb the misalignments that exist between them. The pusher gearbox (29) then transfers the rotation to a group of bevel gears (9), which are responsible for moving the cutting pushers (4) via their associated shaft (6), thanks to their specific holders (7).
As previously indicated, the operator can adjust these pushers in height and depth, and hence the transfer of all these movements has to accommodate all possibilities. To this end, the pusher gearbox (29) transmits the rotational movement through a square-section shaft by means of a gimbal joint. The input gear of the bevel gear group that moves the cutting pushers (9) has the freedom to slide longitudinally along the square-section shaft and, together with the gimbal joint, allows the correct transfer of movement for whatever adjustment has been made by the operator on the cutting pushers.
This movement of the pushers, together with the oscillatory movement of the blades (2), enables the correct cut and harvesting of the crop. As previously indicated, the cutting-system gearbox (40) is responsible for transmitting the movement of the drive wheel to the shaft associated with a cam, so that the rotation of this cam converts the rotational movement of the shaft in an oscillatory movement of the blades (2). These blades are grouped in series on a common support and slide between the tines (1) and holders (3) that prevent them from slipping out of the housing on which they slide. The tines serve a double function: on the one hand, their union creates the housing on which the blades slide and, on the other hand, they guide the harvest towards the blades, and hold them ready for cutting.
Once the harvest is cut and deposited on the reception conveyor (31), it is raised by means of the rise conveyors (33 and 34) to the compacting and knotting area of the sheaves. Upon reaching this area, the product encounters the sheaf framer (26), which aligns the harvest to form uniform sheaves. Subsequently, nail-shaped sheaf compactors (45 and 46) compact them at the end of the platform against the sheaf bumper guards (21) until the required sheaf size is achieved, at which point the knotting trigger (20) is activated under pressure.
Once this knotting trigger is activated, a synchronized movement is performed between the knotting needle (42), armed with the threaded string, and the knotter (19), which performs the knot and cuts the string. In the same movement of this system, the machine expels the sheaf made by means of sheaf pushers (16, 17, and 18) that rotate in unison, thereby completing the cycle of this reaper-binder machine.
This set of synchronized movements is achieved by means of chain sprocket 3 (44) which jointly moves the shaft responsible for the movement of the sheaf compactors (45 and 46) and transmits the rotation to a gearbox that performs the knotting movements. These movements are transmitted via a clutch (24) located in this gearbox, and are performed when the knotting trigger (20) is activated. At this moment, the clutch rotates an internal group of bevel gears that moves the knotting turning gear (22) and, in turn, drives the knotting-system shaft and the shaft containing the knotting needle (42) through a cam (23) in a connecting rod/crank movement. The shaft of the knotting system contains the sheaf pushers that eject the sheaves, and also, a knotting control gear (15) which is responsible for synchronously moving all the internal elements of the knotter with the movement of the needle.
3.2. Three-Dimensional Modelling of the Parts and Final Assembly of the Three-Dimensional CAD Model
The 3D CAD model of the unit presents enormous complexity, given the high number of elements (over 220) and the application of dimensional, geometric, and movement restrictions and the constraints of the joints to obtain a model that is very close to the actual model.
Likewise, mechanical expertise has been necessary to fully understand the complex operation of the mechanism and thus give meaning to each of the elements therein.
3.2.1. Cutting System and Rotating Pushers
This is the most important system of the machine, since it is responsible for automatic reaping thanks to the traction provided by the draft of the animals. It is formed by a series of comb-shaped tines to tackle the crop in an optimal way, and also, serves as a cutting holder in the movement of the blades (
Figure 4).
The oscillating movement of the blades on the tines is performed by a connecting rod/crank mechanism in which a rotary movement generated by the advance of the machine on the ground is transformed into an oscillating linear movement of the blades (
Figure 5) which slide together between the tines. This sliding is possible due to the housing formed by the mounting of the tines on their support and to the upper bumper guards that prevent the set of blades from slipping out of position without exerting so much pressure thereon that it would halt the blades (
Figure 6).
Furthermore, in order to facilitate the sowing input and to improve the cut, the machine has rotating pushers (
Figure 7), adjustable in height from the operator’s seat, which push the sheaves inward, thereby preventing them from falling into the path of the machine. A sectional view of the sheaf pusher system is shown in
Figure 8.
These rotating pushers are driven by bevel gears, whereby the driving gear is slid along its shaft of rotation to allow the height adjustment of this rotating pusher system (
Figure 9). The supports of these pushers are jointly connected to the shaft that makes them rotate, which rotates on bronze bushings placed on the adjustable support. This support is perfectly designed to withstand the high-value bending moment generated by the weight of the pushers, by distributing the turning bushings at the correct distance in order to prevent overloading.
3.2.2. Reaping Transport and Lifting System
Once the reaping has been carried out, the product falls on a conveyor belt moving towards a lifting ramp formed by two opposing conveyor belts (
Figure 10,
Figure 11 and
Figure 12). These conveyor belts, which rotate in unison, compress the sheaves, thereby facilitating their raising to the knotting area.
These conveyor belts, moved by wooden rollers, were made with textile fabrics and transverse inlays that improved the drive of the sheaves.
In this type of transport, in which the drive roller lacks any type of teeth that would allow it to transmit a greater moment, the belts must run with sufficient tension to achieve adequate traction, since the existing friction force increases linearly with the contact force perpendicular to the surface. To this end, each transport has a belt tension system, in which it is worth noting that of the lower conveyor where the sheaves fall once they have been cut (
Figure 13).
Likewise, this transport has a particular tensioning system for the drag roller, in which a connecting rod is made to move by means of a threaded shaft, which uniformly tightens the roller (
Figure 14).
The threaded shaft, at one end with a right-hand thread and at the opposite end with a left-hand thread, performs a symmetrical movement of the connecting rods, thereby preventing the uneven tension of the conveyor belt that may cause its misalignment in the line of contact between the roller and the conveyor belt and would lead to its premature wear.
In order to understand this aspect, the decomposition of forces is represented in the line of contact between the roller and the conveyor belt (
Figure 15).
With F as the traction force of the conveyor belt, it can be observed that, once there is a misalignment (α) of the line of contact between the roller and the conveyor belt, a component Fx1, appears, where Fx1 = F1 sin α, which is essential in the adjustment of the belts and, therefore, in their useful life.
In this way, the traction rollers are made up of alloyed steel supports at both ends that have a housing in which to locate the wooden roller, and, in addition to that housing, they have a cylindrical tip upon which the sprocket that moves it is fixed (
Figure 16).
On the other hand, the composition of the tension rollers is similar: they consist of supports fixed to each end of a wooden roller that can rotate freely (
Figure 17).
In the machine under study, each transport is made up of a traction roller and a tension roller, this being the most common constructive form of this type of short-length transport.
However, there is a small constructive difference between the traction rollers of the lower rise conveyor and the rest of the conveyors. In the case of reception and upper rise conveyors, these each have a traction roller that has a fixed point where the sprocket that makes it rotate is located, and another free point, which is fixed to the transport structure: this does not occur in the lower rise conveyor. This conveyor has a traction roller in which both ends have a fixed shaft upon which, on the one hand, a sprocket is housed that makes it rotate due to chain transmissions and, on the other hand, a gearbox is housed that transmits the rotation to the upper rise conveyor (
Figure 18).
3.2.3. Sheaf Grouping and Knotting System
This is the most complex and sophisticated system of the machine due to the precision and synchronism that all its elements must possess for its proper operation. Once the sheaves are transported to the upper part, they pass through some plates (
Figure 19) that, by means of an oscillating movement provided by a connecting rod/crank mechanism (
Figure 20), group the sheaves so that the subsequent packaging is as homogeneous as possible.
Once the sheaves have passed through these plates, the well-packed sheaves pass through a system of compacting needles (
Figure 21) which groups them together and compacts them. Once a sufficient number of sheaves have been grouped together, this needle system presses a trigger that activates the knotting system (
Figure 22).
These compactor needles move in a four-bar system that creates an oscillating drag movement. By activating the knotting system, the clutch located in the knotting gearbox (
Figure 23) rotates the knotter turn gear one full turn. In this complete rotation, an oscillatory movement of the needle occurs due to a movement of the connecting rod/crank type that exists between said gear and the shaft of the needle, by means of a cam.
Moreover, this movement is accompanied by the movement of the knotter elements (
Figure 24), which perform the knotting thanks to the knotting control gear. During the entire rotation of the knotter shaft, the pushers rotate, which, in their final movement, push the knotted sheaves out of the machine.
3.2.4. Mechanical Transmission and Drive Wheel System
Undoubtedly, the success of this machine resides in the way that the traction force of the draft animals is converted to give rise to all the movements of the various elements of this machine, thanks to a drive wheel that rotates a series of shafts using sprockets and gears.
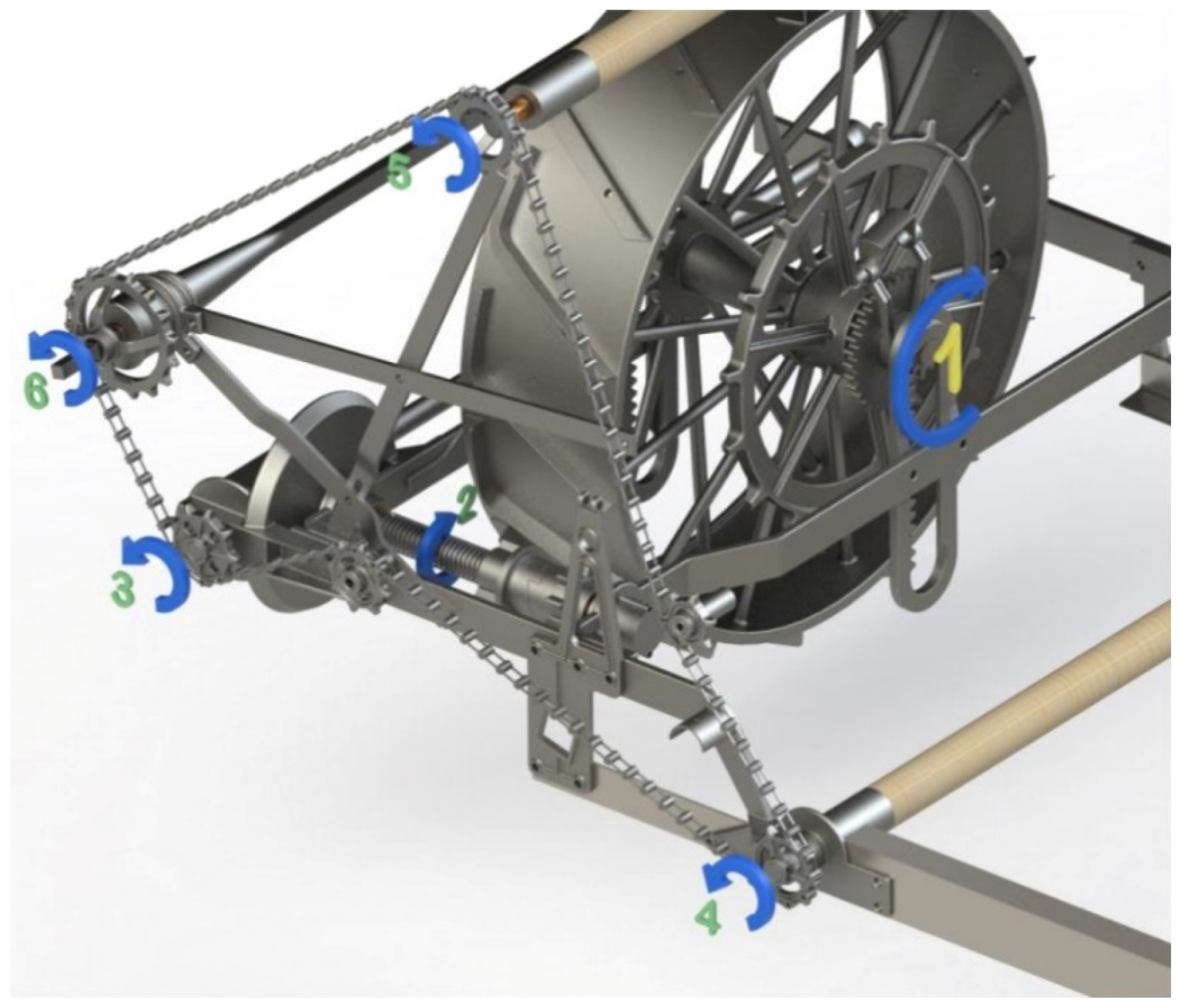
Figure 25 shows two views (back and front) of the mechanical transmissions. As can be observed, at the rear is a chain that distributes the movement to the different shafts of the various systems.
Figure 26 shows the description of the operation of the first set of elements of the transmission system.
This machine was initially hauled by draft animals, which made the drive wheel roll, together with the sprocket attached to it (turning movement 1). This turn was transmitted to a parallel shaft by means of a sprocket system with a clutch, which made it possible to paralyze the movements of the machine, even when the animals were still pulling it.
When said clutch was engaged, movement 1 was transmitted to said shaft, thereby generating a higher speed turn (turn movement 2), and subsequently this turn became turn movement 3 thanks to a group of bevel gears. This turning movement was responsible both for pulling the chain that transmits the turning movement to shafts 4, 5, and 6, and for generating the oscillating movements of the blades.
Turning movement 4 was responsible for moving the conveyor to where the sheaves fall, while turning movement 5 was in charge of driving the lower rise conveyor belt and, in turn, of transmitting the movement to the upper rise conveyor. Finally, turning movement 6 would be responsible for the movements of the knotting system, including both that of the compacting nails and of the needle and knotter.
In order to examine the operation of the second set of elements of the transmission system, the opposite side of the machine is observed (
Figure 27).
As can be observed in
Figure 27, turning movement 7 corresponds to turning movement 3 of
Figure 26. This movement is converted into oscillating movement 8 by means of a connecting rod/crank mechanism.
The movement of the upper sheaf transport system corresponds to turning movement 10, which, as indicated, comes from the turning of the lower rise conveyor of the sheaves (turning movement 9). In turn, this turning movement 9 is transmitted by a gearbox that converts turning movement 9 into turning movements 10 and 11.
Likewise, turning movement 11 is converted into turning movement 12, which is responsible for making the sheaf pushers rotate by means of turning movement 13.
Finally, since the machine allows changes in height and inclination of the pushers, these latter shafts are connected by gimbal joints (
Figure 28).
3.2.5. System of Adjustments Made by the Operator
Like most machines, this reaper-binder has regulators and adjustments by the operator that enable it to work optimally under various terrain circumstances.
Blade-Height Adjustment
The height of the blades is adjusted by means of two levers that raise and lower the wheels on which the machine moves when it is working: the drive wheel and the drag wheel (
Figure 29).
In the case of the drive wheel, the height-adjustment lever moves a worm-crown gear that makes a gear that is integral with the axis of rotation of said wheel movement via a rack (
Figure 30), thereby enabling its height to be modified.
In the case of the drag wheel, the height-adjustment system assumes the same form of operation, although, in this case, the wheel hub remains integral with the rack, and it is the sprocket that maintains its height, which varies the height with the turn of the crank.
Movement of Mechanical Systems
As indicated above, the machine has a clutch system (
Figure 31) so that the mechanisms of the machine can start moving, as required. To this end, it has a lever with a horseshoe-shaped tip that allows the operator to operate a gear wheel that transmits the movement.
Regulation Levers
Once the machine is in operation, four adjustment levers are available from the operator seat (
Figure 32), to control the inclination of the blades, the height and depth of the sheaf input pushers, and the operation of the knotting system.
Lever 1 is in charge of adjusting the inclination of the machine and with it the inclination of the blades with respect to the ground; lever 2 is responsible for changing the depth of the wooden pushers, by pushing the support point of the pushers either backwards or forwards; lever 3 is in charge of regulating the size of the sheaf to be knotted, by acting on the trigger that the knotter releases; finally, lever 4 is responsible for adjusting the height of the pushers according to the size of the sheaves to be reaped, for which the operator slides the lever downwards to raise the pushers, or slides it upwards to lower the pushers with the help of an extension spring.
3.2.6. Final Assembly
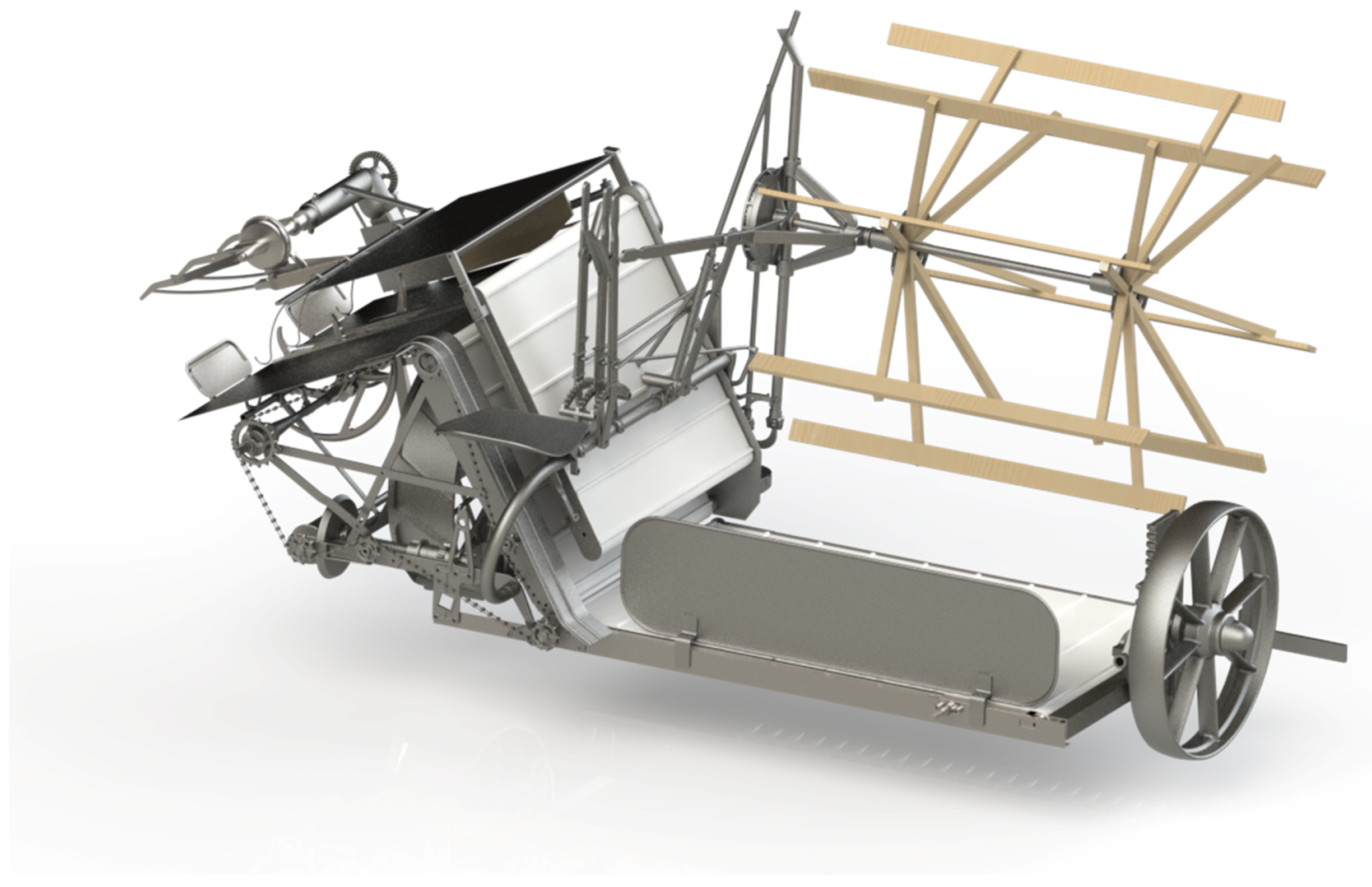
Finally, a front (
Figure 33) and back (
Figure 34) view is shown once all the elements that comprise the reaper-binder have been assembled, after applying all dimensional, geometric, and movement restrictions, and the constraints of the joints, in order to obtain a 3D CAD model as true to reality as possible.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

































