
Algorithm of Berthing and Maneuvering for Catamaran Unmanned Surface Vehicle Based on Ship Maneuverability


Abstract
:1. Introduction
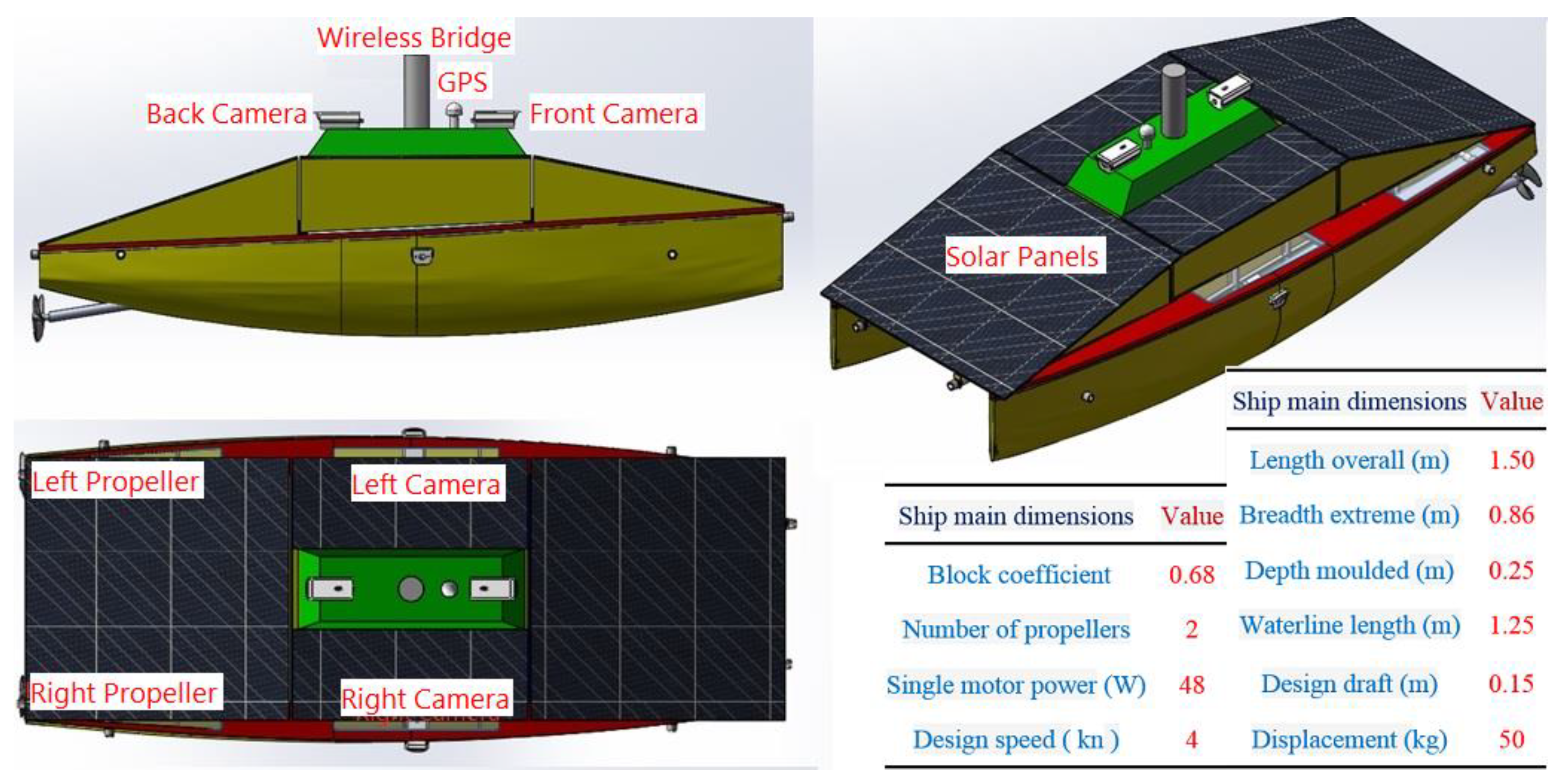
2. Overview of the Catamaran USV
3. Maneuvering Motion Modeling of Catamaran USV
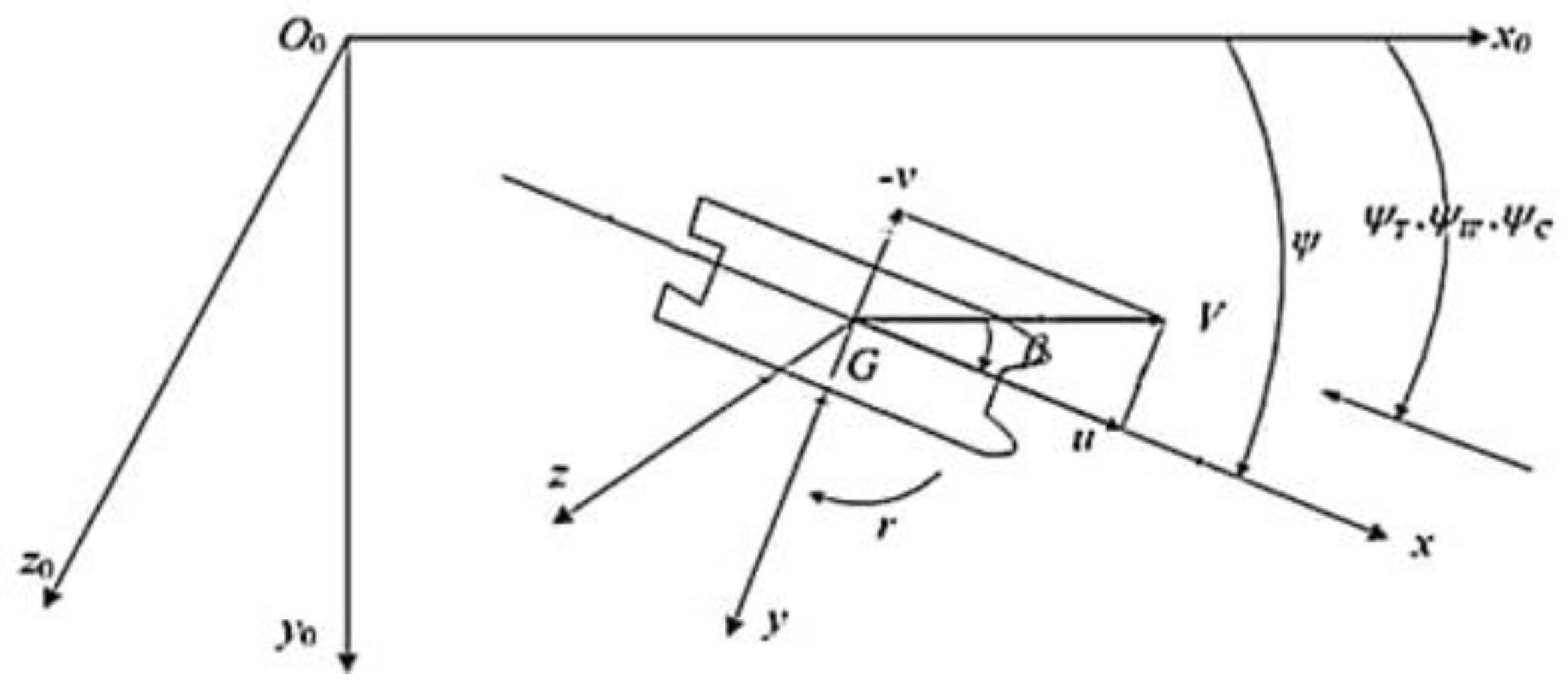
3.1. Coordinate System Establishment and Conversion
3.2. The Establishment of a Mathematical Model of Handling the Catamaran USV
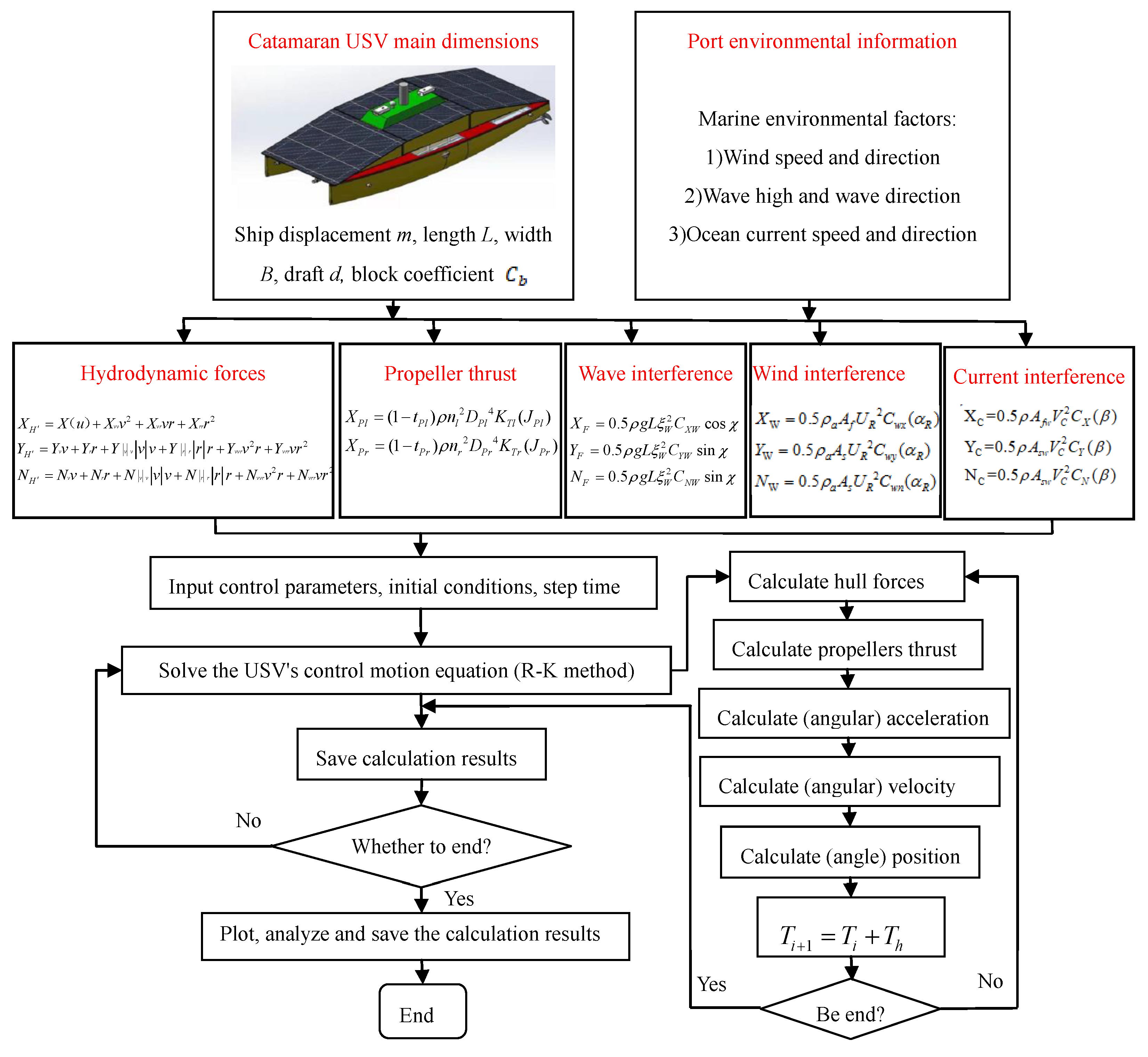
4. Calculation of Forces and Moments
4.1. Calculation of Fluid Dynamics Acting on the Hull
4.2. Propeller Thrust Calculation
4.3. Wind Interference Force Calculation
4.4. Wave Interference Calculation
4.5. Ocean Current Interference Force Calculation
5. Maneuverability Simulation of Catamaran USV
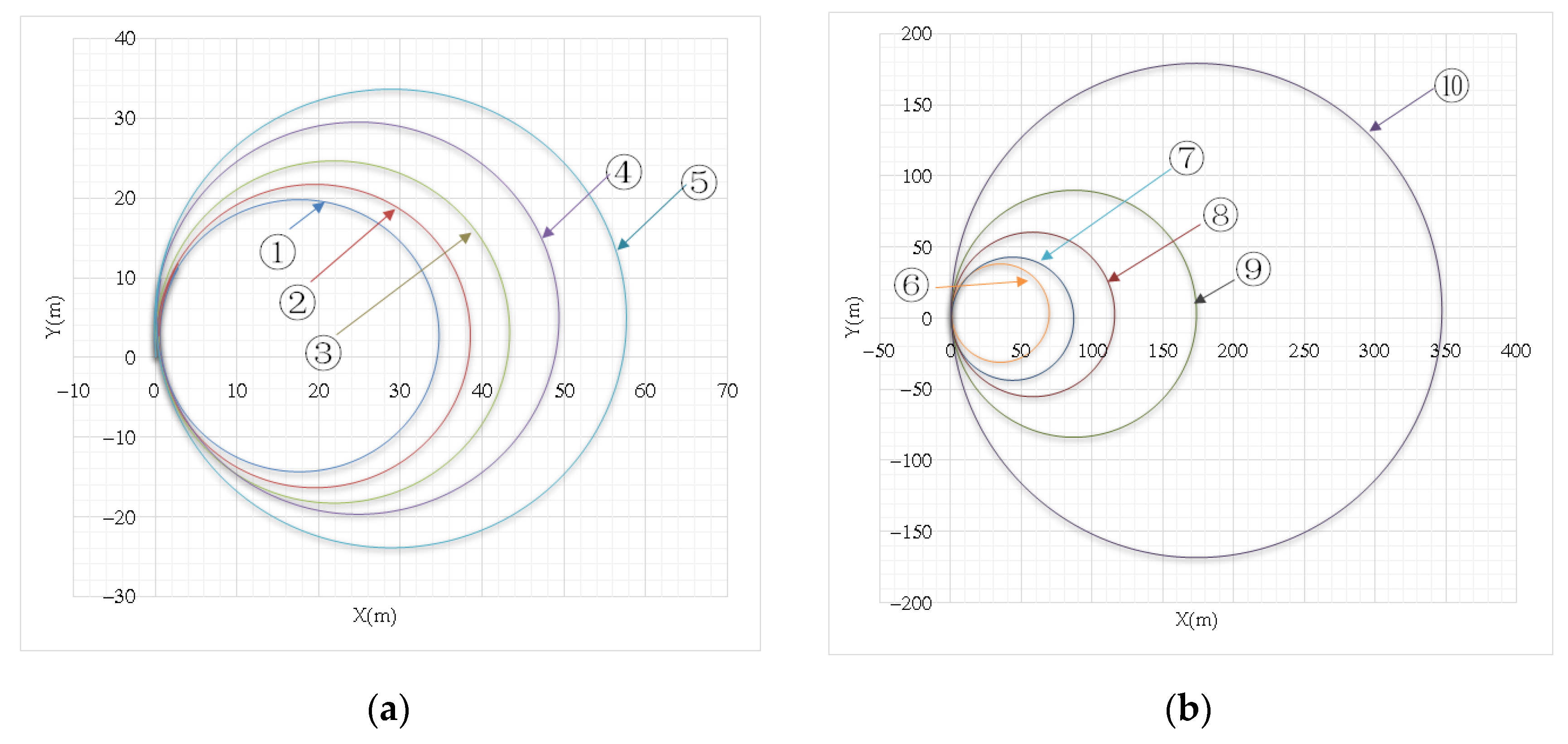
5.1. Simulation Experiment of USV Rotation in Still Water
5.2. Simulation Experiment of Rotation in Wind and Waves
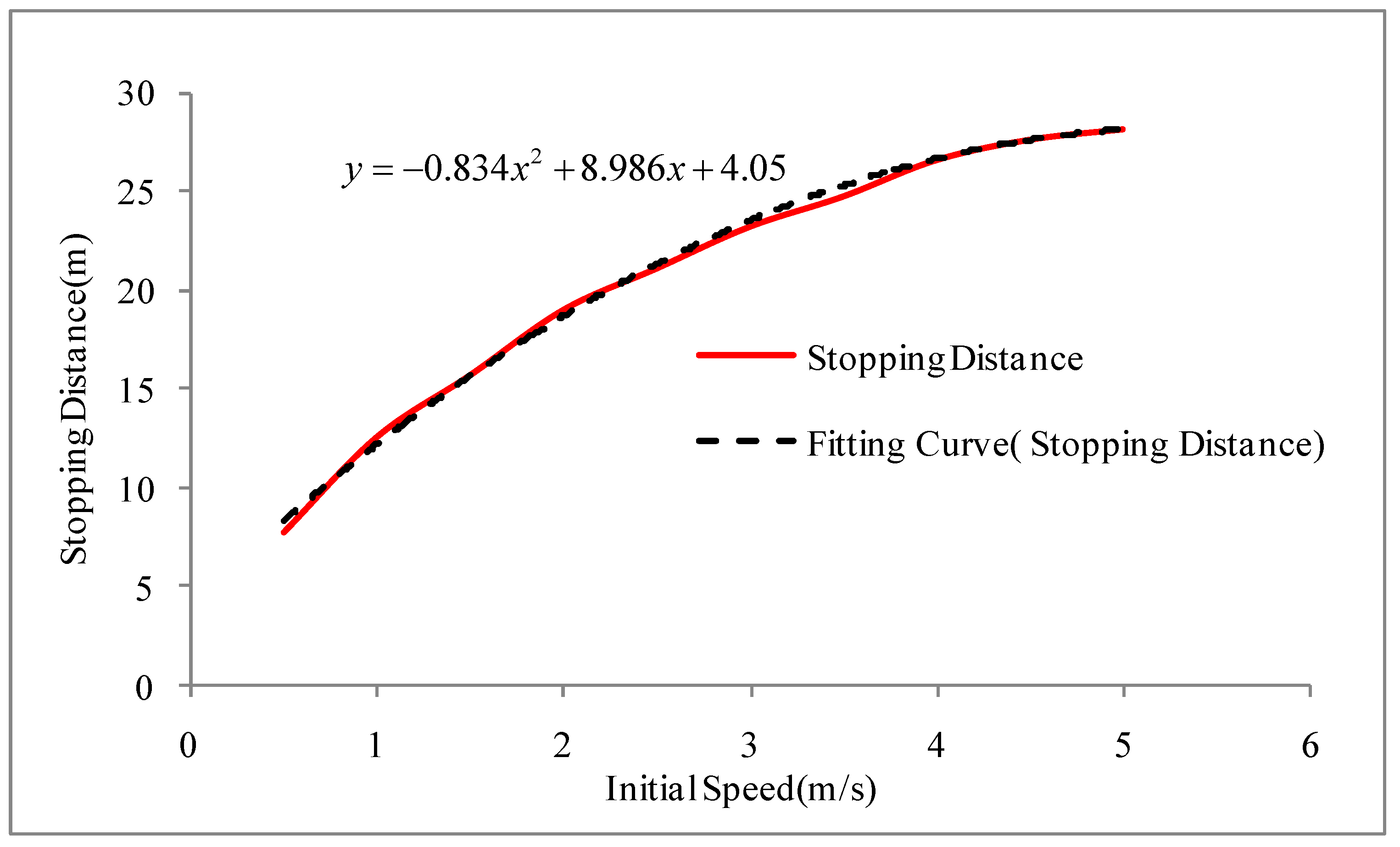
5.3. Simulation of USV Stopping Test
6. Berthing Algorithm and Simulation Verification for Catamaran USV
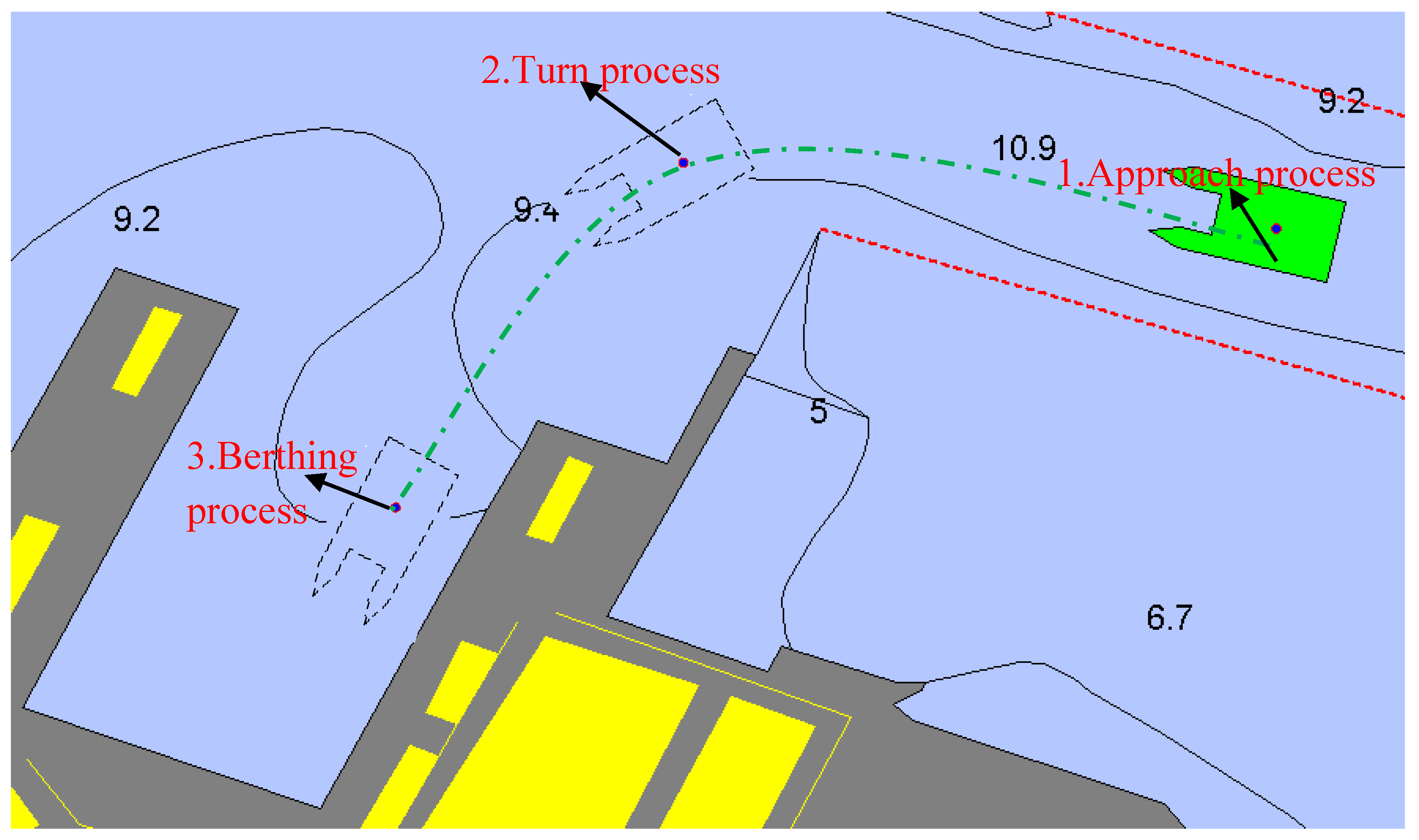
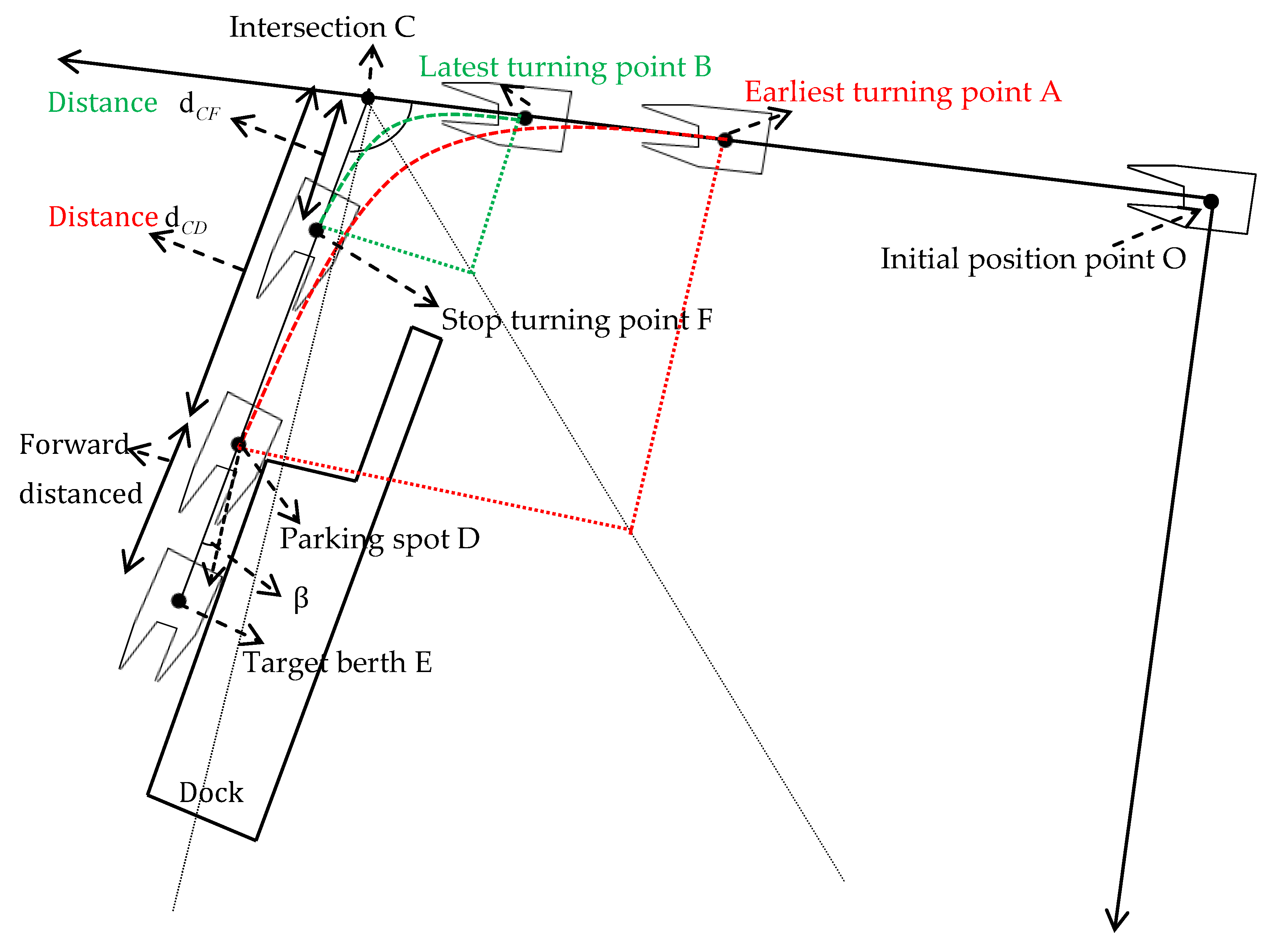
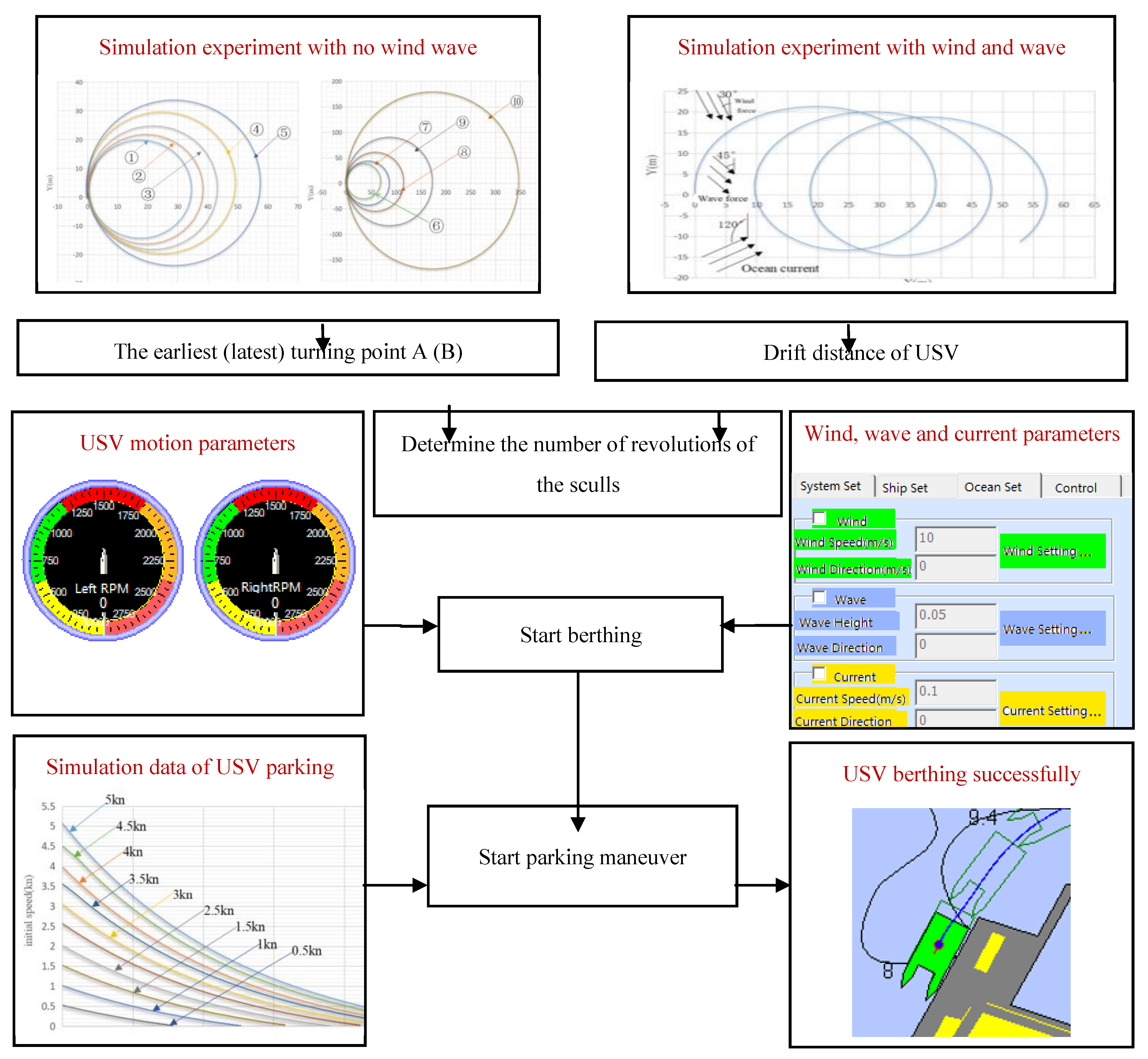
6.1. Berthing Algorithm
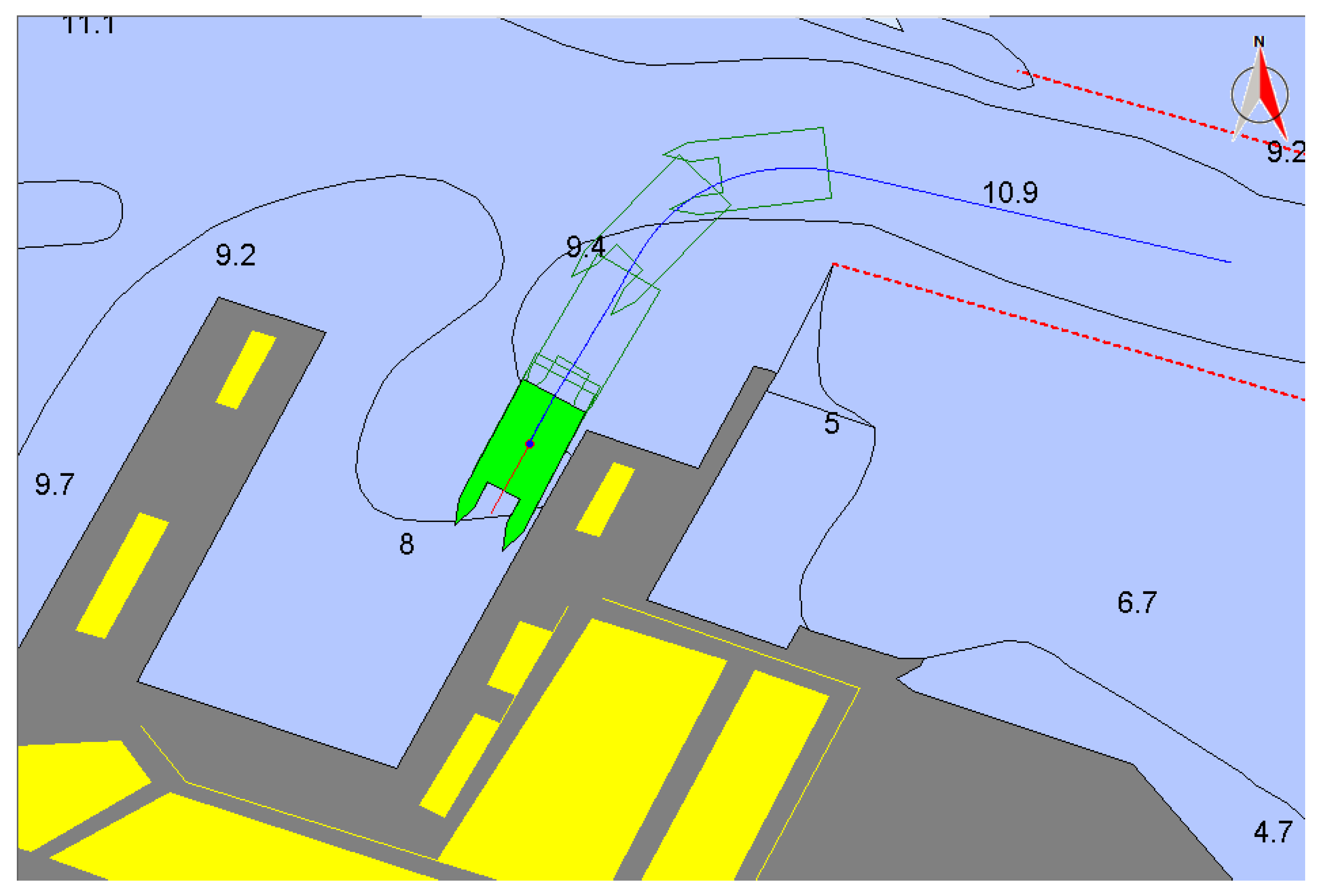
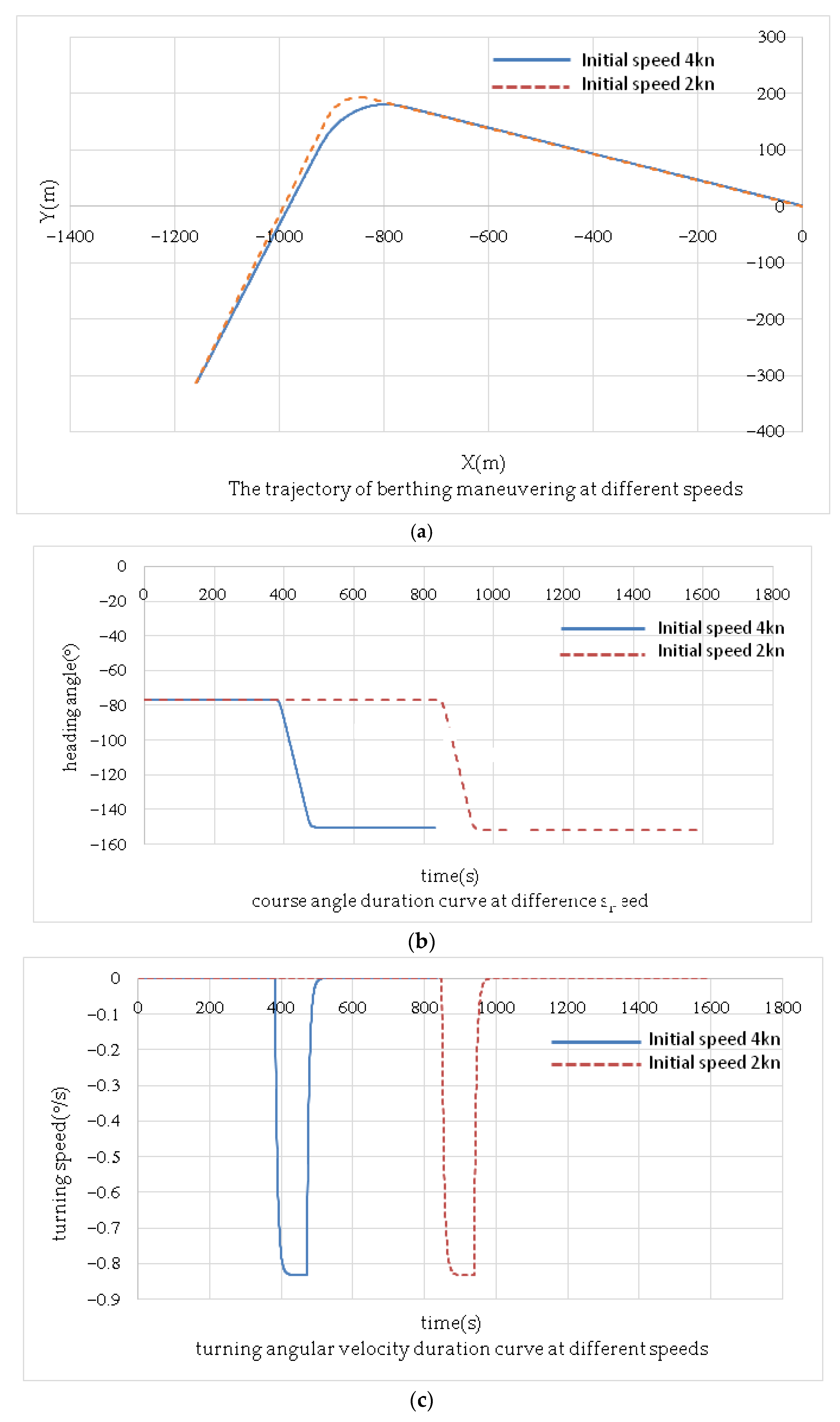
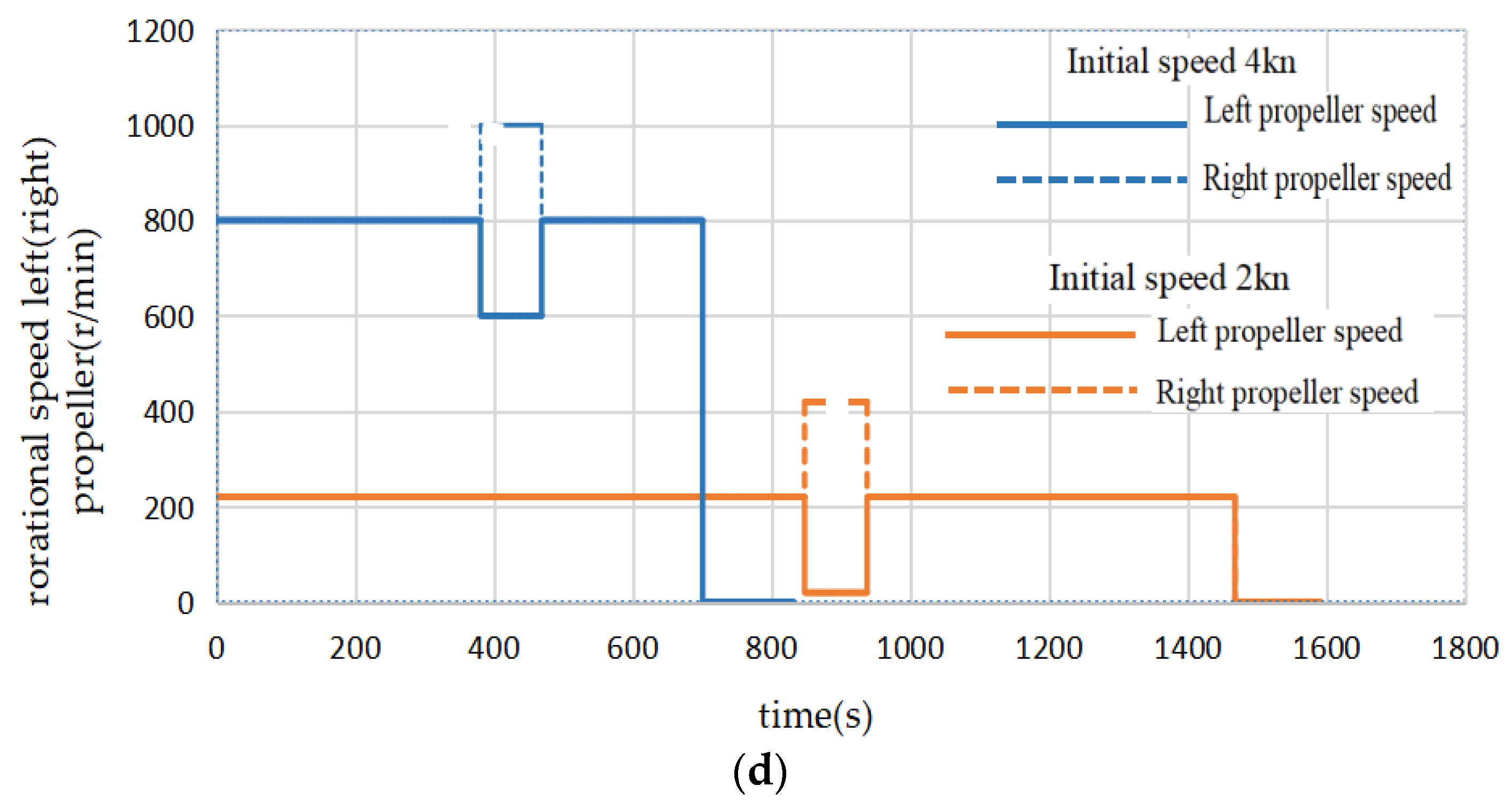
6.2. Berthing Simulation in Calm Water
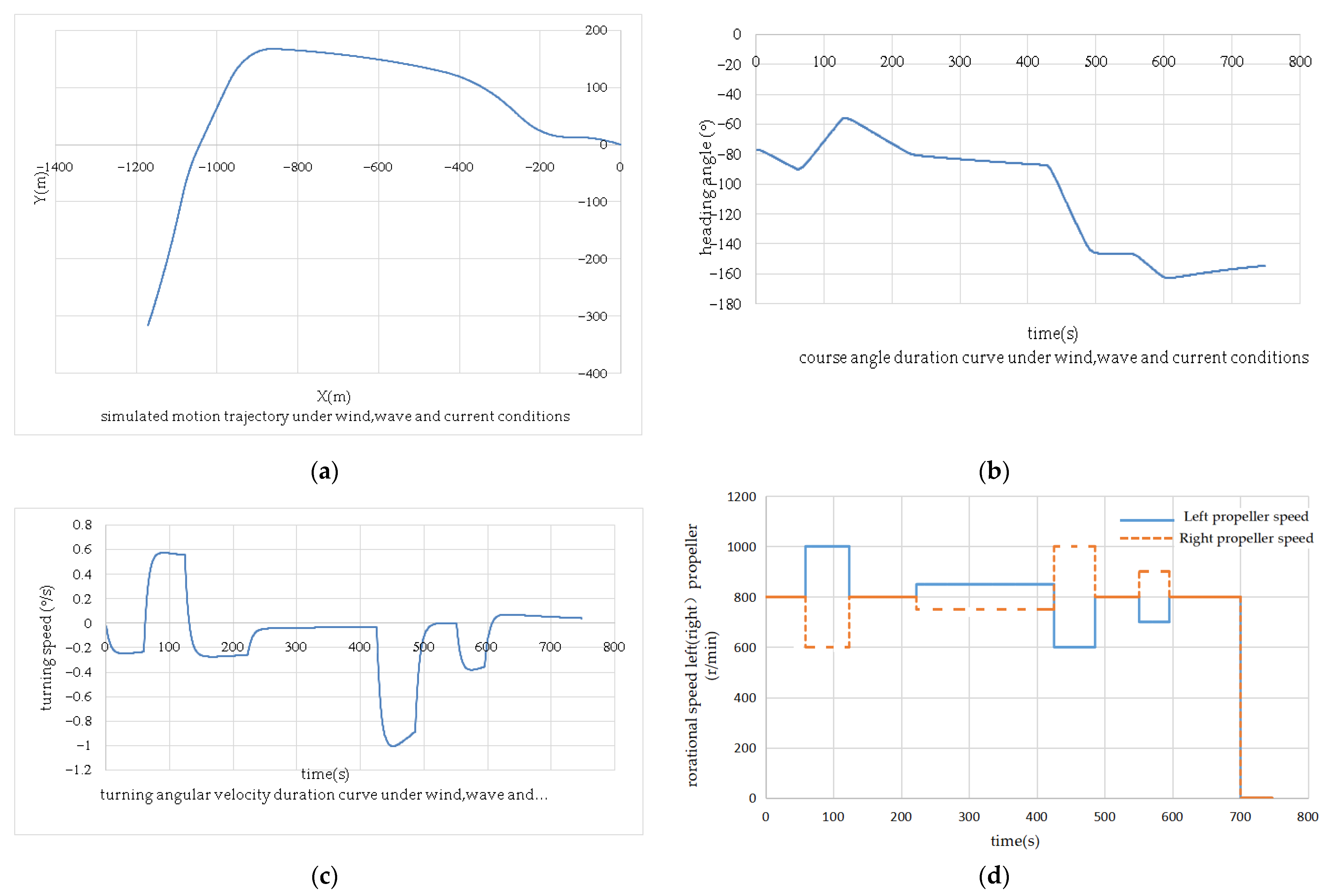
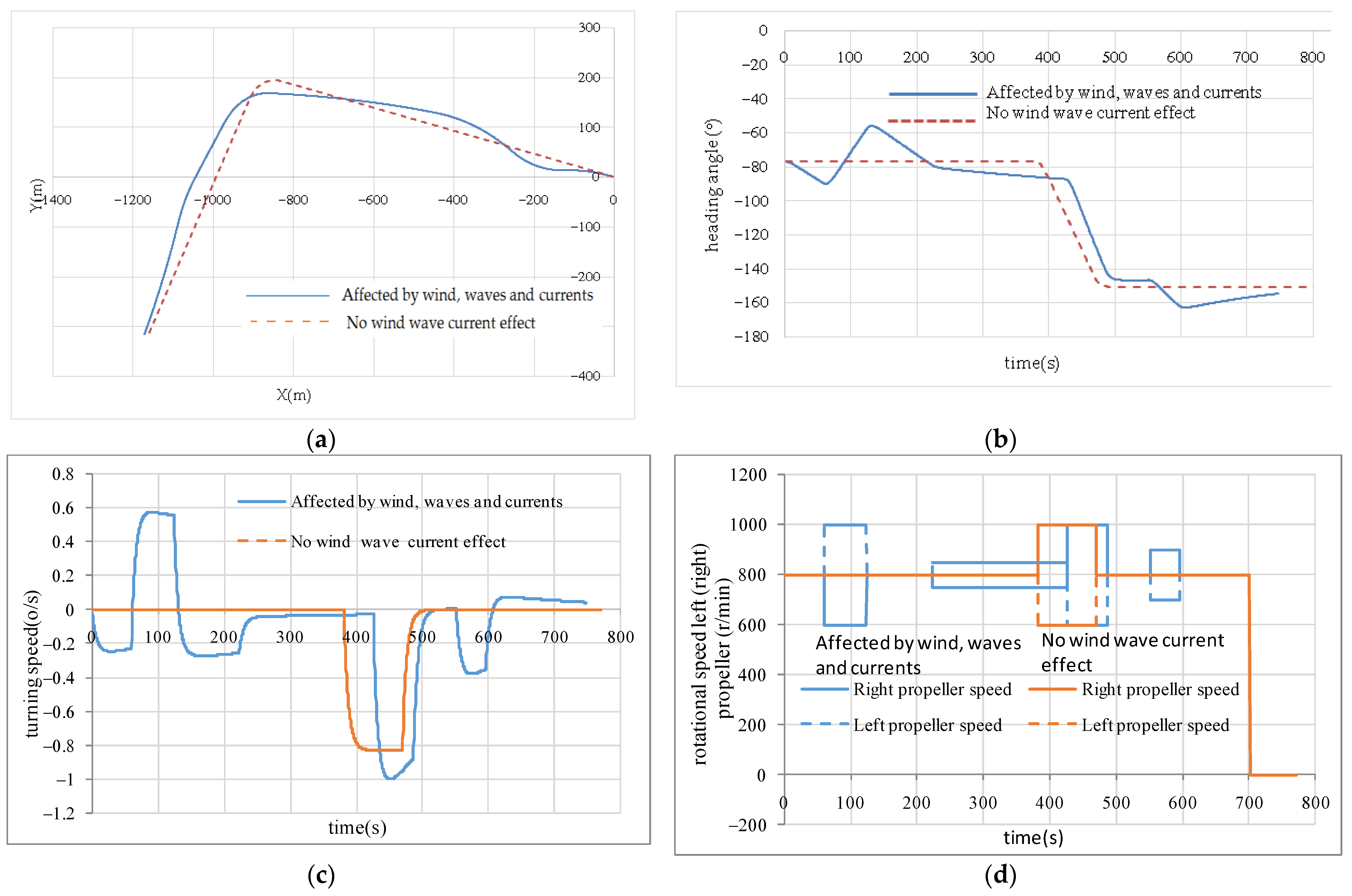
6.3. Berthing Simulation in Wind, Wave, and Current Conditions
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lang, S.Y. Development and Application of Civil Unmanned Boats. Mar. Equip. Mater. Mark. 2018, 9, 45–47. [Google Scholar]
- Li, J.L. Development and Application of Unmanned Surface Vehicle. Fire Control Command Control 2012, 37, 203–207. [Google Scholar]
- Zhang, Y.L. Simulation Study on Added Resistance and Motions of Small Waterplane Catamaran in Waves. Master’s Thesis, Jiangsu University of Science and Technology, Zhenjiang, China, 2019. [Google Scholar]
- Li, Y.Y. Research on Control Methods of SWATH Ship. Master’s Thesis, Harbin Engineering University, Harbin, China, 2005. [Google Scholar]
- Wang, C.; Lin, Y.; Hu, Z.Q.; Yi, R.W.; Geng, L.B. A parametric modelling method of unmanned surface vehicle with small waterplane area twin-hull based on uniform rational b spline. Ship Sci. Technol. 2017, 39, 143–148, 166. [Google Scholar]
- Tang, Y. Preliminary study on optimization of a green water small waterline double-body unmanned boat. Jiangsu Sci. Technol. Inf. 2019, 36, 28–30, 53. [Google Scholar]
- Tang, L.; Wu, J.M.; Wu, L. Multi-objective Optimization on Demi-hull Dimensions of Small Water-plane Area Twin Hull Vessel Based on EEDI. Ship Eng. 2020, 42, 36–43. [Google Scholar]
- Li, G.; Yan, B.; Jiang, C.B.; Liu, Z. Investigation on the directivity of small waterplane area twin-hull. Ship Sci. Technol. 2020, 42, 26–29. [Google Scholar]
- Honaryar, A.; Mahmoud Ghiasi, M.; Liu, P.F.; Honaryar, A.R. A new phenomenon in interference effect on catamaran dynamic response. Int. J. Mech. Sci. 2021, 190, 106041. [Google Scholar] [CrossRef]
- Chen, D. Overall Performance of a Small Waterplane Area Twin Hull Ship with L-Type Demihulls. Nav. Archit. Ocean Eng. 2019, 35, 13–18. [Google Scholar]
- Gao, F.; Ji, F.; Shen, W.J.; Hu, K. Analysis and Study of Mooring Conditions of High-speed Passenger Catamarans. Port Eng. Technol. 2019, 56, 1–4. [Google Scholar]
- Xiao, Z.M. Modeling and Simulation of Ship Manoeuvring Motion in Winds and Waves. Master’s Thesis, Dalian Maritime University, Dalian, China, 2007. [Google Scholar]
- Lee, S.D.; Tzeng, C.Y.; Kehr, Y.Z.; Kang, C.-K. Design and Application of an Image-Processing-Based Fuzzy Autopilot for Small-Boat Approaching Maneuvers. J. Mar. Sci. Technol. 2010, 18, 558–567. [Google Scholar]
- Bai, J. Simulation of Large Vessel Berthing Maneuvering. Master’s Thesis, Dalian Maritime University, Dalian, China, 2010. [Google Scholar]
- Li, Z.B. The Simulation Study on Very Large Crude Oil Carrier Turning Berthing Maneuvering with Tug Assistance. Master’s Thesis, Dalian Maritime University, Dalian, China, 2012. [Google Scholar]
- Li, R.L. Study of Self-Berthing of the Large Vessel. Master’s Thesis, Dalian Maritime University, Dalian, China, 2012. [Google Scholar]
- Okazaki, T.; Ochiai, H.; Kashima, H.; Iwakiri, T. Development of override ship maneuvering simulator using AR toolkit. In Proceedings of the World Automation Congress, Waikoloa, HI, USA, 3–4 August 2014; pp. 340–345. [Google Scholar]
- Lan, P. Research on Modeling and Simulation of Large Twin-Ropeller Twin-Rudder Ship. Master’ Thesis, Dalian Maritime University, Dalian, China, 2015. [Google Scholar]
- Mizuno, N.; Uchida, Y.; Okazaki, T. Quasi Real-Time Optimal Control Scheme for Automatic Berthing. Ifac Pap. 2015, 48, 305–312. [Google Scholar] [CrossRef]
- Mizuno, N.; Kuroda, M.; Okazaki, T.; Ohtsu, K. Minimum time ship maneuvering method using neural network and nonlinear model predictive compensator. Control Eng. Pract. 2007, 15, 757–765. [Google Scholar] [CrossRef]
- Gao, S.S. A Preliminary Study on the Comprehensive Optimization of a Catamaran Unmanned Craft. Master’s Thesis, Jiangsu University of Science and Technology, Zhenjiang, China, 2019. [Google Scholar]
- Yang, K.U.; Hur, J.G.; Choi, M.S.; Yeo, D.J.; Byun, J.H. Study on ship automatic berthing system with mooring lines. China Ocean Eng. 2017, 31, 19–29. [Google Scholar] [CrossRef]
- Ablyakimov, I.S.; Shirokov, I.B. Operation of local positioning system for automatic ship berthing. In Proceedings of the 2017 IEEE East-West Design and Test Symposium, (EWDTS 2017), Novi Sad, Serbia, 29 September–2 October 2017. [Google Scholar]
- Zeng, X.L.; Mao, Y.S.; Song, L.F.; Dong, Z.P.; Bao, T. Automatic collision avoidance algorithm for unmanned surface vehicle based on improved bacterial foraging optimization. J. Dalian Marit. Univ. 2018, 44, 38–45. [Google Scholar]
- Im, N.K.; Nguyen, V.S. Artificial neural network controller for automatic ship berthing using head-up coordinate system. Int. J. Nav. Archit. Ocean Eng. 2017, 10, 235–249. [Google Scholar] [CrossRef]
- Hu, J.F.; Wang, P.; Chang, H.B.; Lai, Y.P. Numerical computation and analysis of unsteady force for marine propeller operating behind a SWATH ship. Chin. J. Hydrodyn. 2018, 33, 508–514. [Google Scholar]
- Taimuri, G.; Matusiak, J.; Mikkola, T.; Kujala, P.; Hirdaris, S. A 6-DoF maneuvering model for the rapid estimation of hydrodynamic actions in deep and shallow waters. Ocean Eng. 2020, 218, 108103. [Google Scholar] [CrossRef]
- Taimuri, G.; Mikkola, T.; Matusiak, J.; Kujala, P.; Hirdaris, S. The influence of hydrodynamic assumptions on ship maneuvering. In Proceedings of the 22nd Numerical Towing Tank Symposium (NuTTS 2019), Tomar, Portugal, 29 September–1 October 2019. [Google Scholar]
- Li, Y.; Jia, Z.H.; Zang, W.B.; Liao, Y.L. Layered trajectory planning and experiment for the autoberthing of unmanned surface vehicles. J. Harbin Eng. Univ. 2019, 40, 1043–1050. [Google Scholar]
- Liu, C.J. The Research on the Seakeeping Performance and Longitudinal Motion Stability of Small Water-Plane Area Twin Hull. Master’s Thesis, Jiangsu University of Scienceand Technology, Zhenjiang, China, 2016. [Google Scholar]
- Kim, I.; Chae, C.; Lee, S. Simulation Study of the IAMSAR Standard Recovery Maneuvers for the Improvement of Serviceability. J. Mar. Sci. Eng. 2020, 8, 445. [Google Scholar] [CrossRef]
- Kijima, K.; Katsuno, T.; Nakiri, Y.; Furukawa, Y. On the Maneuvering Performance of a Ship with the Parameter of Loading Condition. J. Soc. Nav. Archit. Jpn. 1990, 168, 45–61. [Google Scholar]
- Inoue, S.; Hirano, M.; Kijima, K.; Takashina, J. A practical calculation method of ship maneuvering motion. Int. Shipbuild. Prog. 1981, 28, 207–222. [Google Scholar] [CrossRef]
- Isherwood, R.M. Wind Resistance of Merchant Ship; Tran of RINA: London, UK, 1973; NO. 115; Available online: https://trid.trb.org/view/19021 (accessed on 4 March 2021).
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2011. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| −1.98 | 0.01 | −23.90 | 0.00 | ||
| −0.58 | 52.70 | 1.15 | 0.17 | −3.26 | 0.38 |
| −0.31 | −0.07 | 0.49 | −0.06 | −0.02 | −0.63 |
| Number | Left Propeller Speed (r/min) | Right Propeller Speed (r/min) | Rotating Speed Difference (r/min) | Turning Time (s) | Turning Diameter (m) | Turning Angle Speed (°/s) |
|---|---|---|---|---|---|---|
| ➀ | 1020 | −580 | 1600 | 120 | 34.11 | 3.32 |
| ➁ | 940 | −500 | 1440 | 133 | 38.01 | 2.99 |
| ➂ | 860 | −420 | 1280 | 145 | 42.83 | 2.66 |
| ➃ | 780 | −340 | 1220 | 165 | 49.18 | 2.32 |
| ➄ | 700 | −260 | 960 | 196 | 57.47 | 1.99 |
| ➅ | 620 | −180 | 800 | 232 | 69.12 | 1.66 |
| ➆ | 540 | −100 | 640 | 280 | 86.57 | 1.33 |
| ➇ | 460 | −20 | 480 | 376 | 115.51 | 0.99 |
| ➈ | 380 | 60 | 320 | 559 | 173.47 | 0.66 |
| ➉ | 300 | 140 | 160 | 1103 | 346.95 | 0.33 |
| Number | Left Propeller Speed (r/min) | Right Propeller Speed (r/min) | Rotating Speed Difference (r/min) | Drift Distance (m) |
|---|---|---|---|---|
| (1) | 1020 | −580 | 1600 | 9.10 |
| (2) | 860 | −420 | 1280 | 12.46 |
| (3) | 780 | −340 | 1120 | 14.80 |
| (4) | 700 | −260 | 960 | 18.50 |
| (5) | 540 | −100 | 640 | 35.48 |
| (6) | 460 | −20 | 480 | 54.86 |
| Parameter Timetable (s) | Heading Angle (°) | Left Propeller Speed (RPM) | Right Propeller Speed (RPM) | Rotating Speed Difference (RPM) | Turning Speed (°/s) |
|---|---|---|---|---|---|
| 0 | −77.0 | 800 | 800 | 0 | −0.02 |
| 59 | −90.1 | 1000 | 600 | 400 | −0.17 |
| 124 | −57.6 | 800 | 800 | 0 | 0.56 |
| 223 | −79.3 | 850 | 750 | 100 | −0.26 |
| 426 | −87.5 | 600 | 1000 | 400 | −0.03 |
| 487 | −141.4 | 800 | 800 | 0 | −0.82 |
| 551 | −146.6 | 700 | 900 | 200 | −0.03 |
| 596 | −161.4. | 800 | 800 | 0 | −0.32 |
| 701 | −156.8 | 0 | 0 | 0 | 0.05 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, G.; Zhao, M.; Cong, Y.; Hu, Z.; Li, G. Algorithm of Berthing and Maneuvering for Catamaran Unmanned Surface Vehicle Based on Ship Maneuverability. J. Mar. Sci. Eng. 2021, 9, 289. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9030289
Wu G, Zhao M, Cong Y, Hu Z, Li G. Algorithm of Berthing and Maneuvering for Catamaran Unmanned Surface Vehicle Based on Ship Maneuverability. Journal of Marine Science and Engineering. 2021; 9(3):289. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9030289
Chicago/Turabian StyleWu, Gongxing, Mingyuan Zhao, Yu Cong, ZhiWen Hu, and Guofu Li. 2021. "Algorithm of Berthing and Maneuvering for Catamaran Unmanned Surface Vehicle Based on Ship Maneuverability" Journal of Marine Science and Engineering 9, no. 3: 289. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9030289