Distributed Control Methods and Impact of Communication Failure in AC Microgrids: A Comparative Review


Abstract
:1. Introduction
- The level of security and reliability of centralized controller schemes [11].
- A difficulty in the redesign of a controller due to the change of even one RES.
- High computational burdens due to the high number of under control units.
- Unavailability for separate management units.
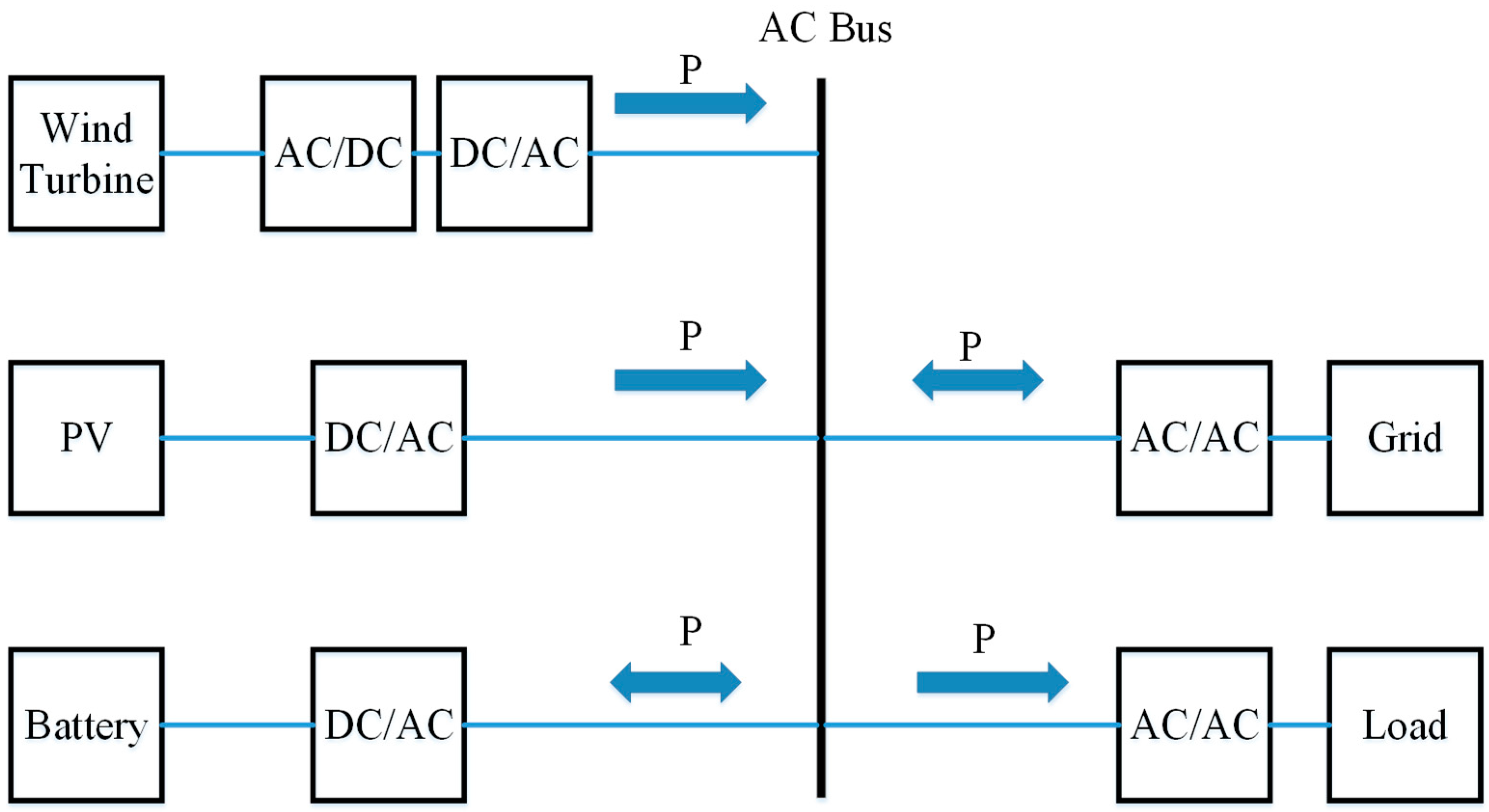
2. Structure of a Microgrid and Modeling of RES
2.1. RES
2.2. Power Converter
2.3. Energy Storage
3. Distributed Control Scheme for AC Microgrids
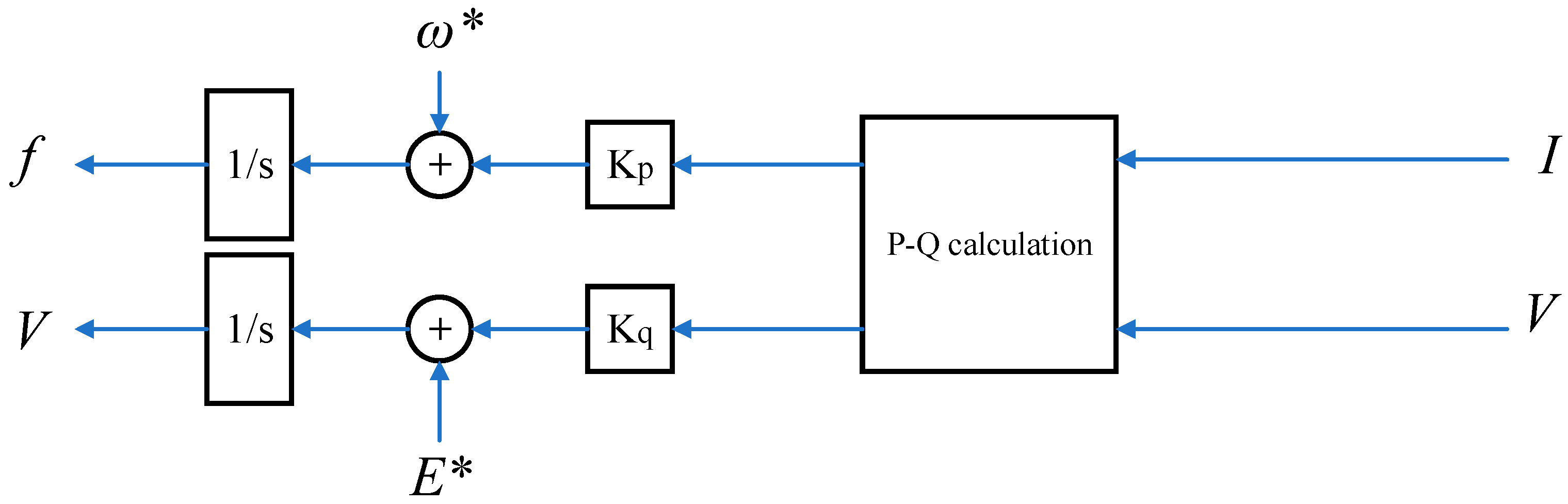
3.1. Droop-Based Methods
3.2. Distributed Model Predictive Control (MPC)-Based Methods
3.3. Consensus-Based Methods
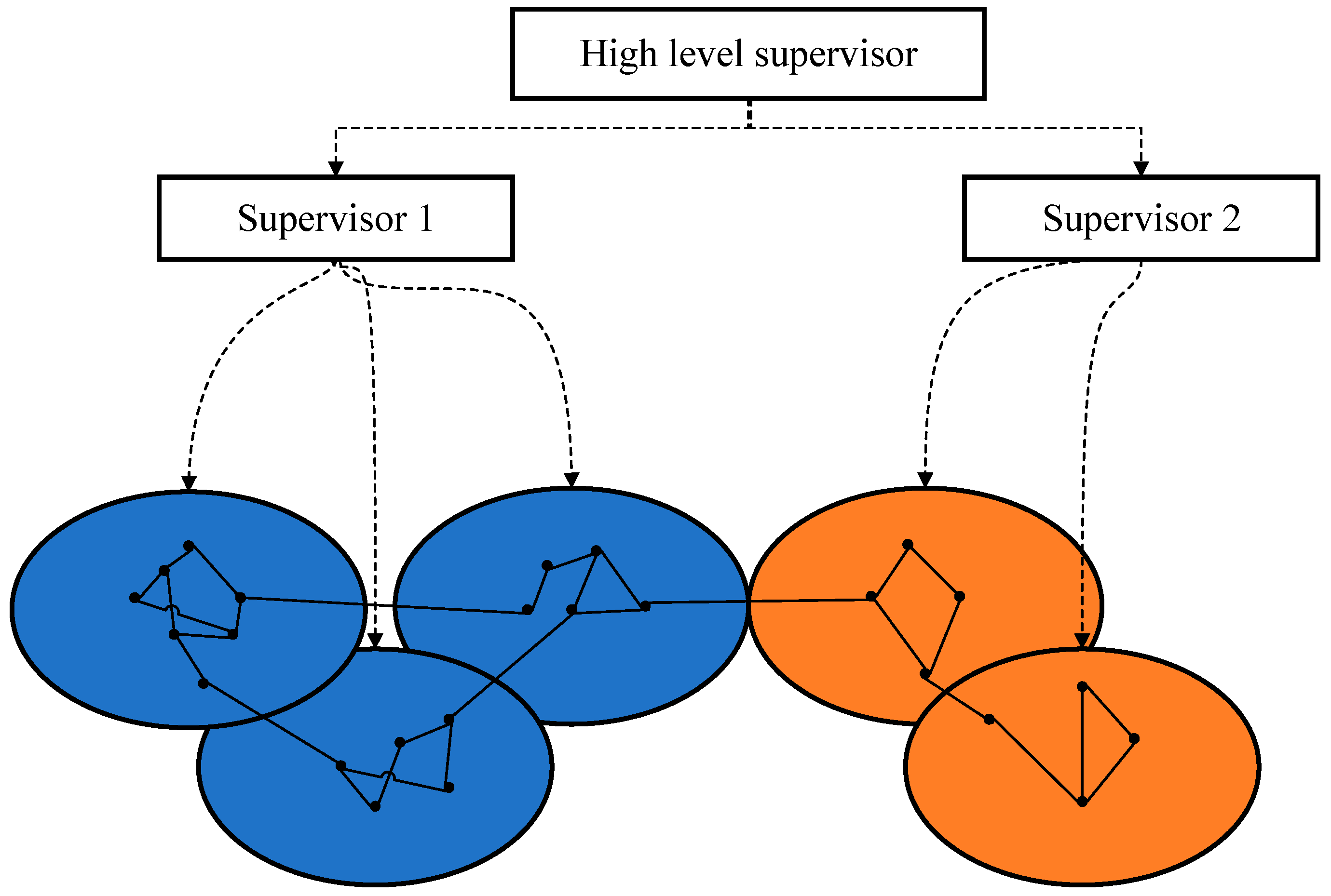
3.4. Agent-Based Methods
- Hierarchical agents include different agent layers.
- Decentralized agent structure includes several localized agents.
- Centralized agent structure includes a single agent.
3.5. Decomposition-Based Methods
3.6. Finite-Time Convergence Control Methods
3.7. Aperiodic Sampling Data-Based Control Methods
3.8. (Radial Basis Function) RBF Neural Network Sliding Mode Control Methods
3.9. Discussion on the Distributed Control Methods
- Results convergence: In distributed control strategies, each controller optimizes the fitness function based on the system for only its own control inputs.
- Stability analysis: Analyzing the stability increases the safety of the design. It is important to implement the results from the control area to microgrid applications.
- Cybersecurity: One of the main reasons for increasing the use of distributed strategies is the unwillingness of stakeholders to share data with other systems against cyberattacks. The communication system can be faced with cyberattacks; thus, increasing the security of these systems against cyberattacks is an important challenge.
- Requirements: The slow and minimal communication requirements for distributed controllers are in contrast with the existing standards in microgrids for avoiding inherent uncertainties. Future researches should focus more on communication-less systems.
- Regulatory consideration: Exchanging data in the distributed control systems is not standard protection in the microgrids.
- Methods independent of the model: Distributed control methods are independent of the detailed system model, and robust during topology changes, in which the status of RES can be changed frequently and impact on the performance of the system.
4. Communication Degradation Processes
4.1. Delay
4.2. Noise
4.3. Packet Dropout
4.4. Communication Failure
4.5. Network Requirements
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| RES | Renewable energy source |
| WT | Wind turbine |
| PV | Photovoltaics |
| LV | Low voltage |
| MMC | Modular multilevel converter |
| MPC | Model predictive control |
| PMU | Phasor measurement unit |
| WIMAX | Wireless broadband private network |
| EPON | Ethernet passive optical network |
| PLC | Power line communication |
| FDI | False data injection |
| NG-EPON | Next generation ethernet passive optical network |
| AMI | Advanced Metering Infrastructure |
| DER | Distributed Energy Resources |
| GPRS | General Packet Radio Services |
| RBF | Radial Basis Function |
| RC | Resistant Capacitance |
| RLC | Resistant-Inductance (L)-Capacitance |
| IGBT | Insulated Gate Bipolar Transistor |
| LCL | Inductance (L) – Capacitance (C) – Inductance (L) |
References
- Carreras, B.A.; Newman, D.E.; Dobson, I.; Poole, A.B. Evidence for self-organized criticality in a time series of electric power system blackouts. IEEE Trans. Circuits Syst. I Regul. Pap. 2004, 51, 1733–1740. [Google Scholar] [CrossRef]
- Nichols, D.K.; Stevens, J.; Lasseter, R.H.; Eto, J.H.; Vollkommer, H.T. Validation of the CERTS microgrid concept the CEC/CERTS microgrid testbed. In Proceedings of the 2006 IEEE Power Engineering Society General Meeting, Montreal, QC, Canada, 18–22 June 2006. [Google Scholar]
- Martirano, L.; Kermani, M.; Manzo, F.; Bayatmakoo, A.; Graselli, U. Implementation of SCADA Systems for a Real Microgrid Lab Testbed. In Proceedings of the 2019 IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar]
- Su, S.; Li, Y.; Duan, X. Self-organized criticality of power system faults and its application in adaptation to extreme climate. Sci. Bull. 2009, 54, 1251–1259. [Google Scholar] [CrossRef]
- Satish, B.; Bhuvaneswari, S. Control of microgrid: A review. In Proceedings of the 2014 International Conference on Advances in Green Energy (ICAGE), Thiruvananthapuram, India, 17–18 December 2014; pp. 18–25. [Google Scholar]
- Bayati, N.; Aghaee, F.; Sadeghi, S.H. The Adaptive and Robust Power System Protection Schemes in the Presence of DGs. Int. J. Renew. Energy Res. 2019, 9, 732–740. [Google Scholar]
- Bayati, N.; Hajizadeh, A.; Soltani, M. Protection in DC microgrids: A comparative review. IET Smart Grid 2018, 1, 66–75. [Google Scholar] [CrossRef]
- Katiraei, F.; Iravani, M.R. Power management strategies for a microgrid with multiple distributed generation units. IEEE Trans. Power Syst. 2006, 21, 1821–1831. [Google Scholar] [CrossRef]
- Arnold, G.W. Challenges and opportunities in smart grid: A position article. Proc. IEEE 2011, 99, 922–927. [Google Scholar] [CrossRef]
- EcoGrid EU. EcoGrid EU: From Design to Implementation. A Large Scale Demonstration of a Real-Time Marketplace for Distributed Energy Resources. 2013. Available online: www.eu-ecogrid.net (accessed on 1 August 2013).
- Teymouri, A.; Fathi, S.H.; Karbakhsh, F. An advanced hysteresis controller to improve voltage profile of power system with PV units: A smart grid power exchange framework. In Proceedings of the 30th International Power System Conference (PSC), Tehran, Iran, 23–25 November 2015; pp. 79–85. [Google Scholar]
- Final Report on the August 14, 2003 Blackout in the United States and Canada: Causes and Recommendations. U.S.-Canada Power System Outage Task Force. Tech. Rep. Available online: https://www3.epa.gov/region1/npdes/merrimackstation/pdfs/ar/AR-1165.pdf (accessed on 1 April 2004).
- Dagdougui, H.; Sacile, R. Decentralized control of the power flows in a network of smart microgrids modeled as a team of cooperative agents. IEEE Trans. Control Syst. Technol. 2013, 22, 510–519. [Google Scholar] [CrossRef]
- Gouveia, C.; Moreira, J.; Moreira, C.L.; Lopes, J.P. Coordinating storage and demand response for microgrid emergency operation. IEEE Trans. Smart Grid 2013, 4, 1898–1908. [Google Scholar] [CrossRef]
- Zhang, S.; Vittal, V. Design of wide-area power system damping controllers resilient to communication failures. IEEE Trans. Power Syst. 2013, 28, 4292–4300. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodriguez, P. Control of power converters in AC microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Bidram, A.; Davoudi, A. Hierarchical structure of microgrids control system. IEEE Trans. Smart Grid 2012, 3, 1963–1976. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Chandorkar, M.; Lee, T.L.; Loh, P.C. Advanced control architectures for intelligent microgrids—Part I: Decentralized and hierarchical control. IEEE Trans. Ind. Electron. 2012, 60, 1254–1262. [Google Scholar] [CrossRef]
- Zamora, R.; Srivastava, A.K. Controls for microgrids with storage: Review, challenges, and research needs. Renew. Sustain. Energy Rev. 2010, 14, 2009–2018. [Google Scholar] [CrossRef]
- Consultant Report: Integration of Distributed Energy Resources. The CERTS MicroGrid Concept; California Energy Commission: Sacramento, CA, USA, 2013.
- Bayati, N.; Hajizadeh, A.; Soltani, M. Fault Analysis and Protection of Low-Voltage DC Microgrid Equipped by Renewable Energy Resources. In Handbook of Research on Recent Developments in Electrical and Mechanical Engineering; IGI Global: Hershey, PA, USA, 2019. [Google Scholar]
- Hossain, M.J.; Pota, H.R.; Mahmud, M.A.; Aldeen, M. Robust control for power sharing in microgrids with low-inertia wind and PV generators. IEEE Trans. Sustain. Energy 2014, 6, 1067–1077. [Google Scholar] [CrossRef]
- Erlich, I.; Kretschmann, J.; Fortmann, J.; Mueller-Engelhardt, S.; Wrede, H. Modeling of wind turbines based on doubly-fed induction generators for power system stability studies. IEEE Trans. Power Syst. 2007, 22, 909–919. [Google Scholar] [CrossRef]
- Leterme, W.; Van Hertem, D. Reduced modular multilevel converter model to evaluate fault transients in DC grids. In Proceedings of the 12th IET International Conference on Developments in Power System Protection (DPSP 2014), Copenhagen, Denmark, 31 March–3 April 2014; pp. 12–25. [Google Scholar]
- Gao, F.; Iravani, M.R. A control strategy for a distributed generation unit in grid-connected and autonomous modes of operation. IEEE Trans. Power Deliv. 2008, 23, 850–859. [Google Scholar]
- De Brabandere, K.; Bolsens, B.; Van den Keybus, J.; Woyte, A.; Driesen, J.; Belmans, R. A voltage and frequency droop control method for parallel inverters. IEEE Trans. Power Electron. 2007, 22, 1107–1115. [Google Scholar] [CrossRef]
- Chandorkar, M.C.; Divan, D.M.; Adapa, R. Control of parallel connected inverters in standalone AC supply systems. IEEE Trans. Ind. Appl. 1993, 29, 136–143. [Google Scholar] [CrossRef]
- Yu, X.; Khambadkone, A.M.; Wang, H.; Terence, S.T. Control of parallel-connected power converters for low-voltage microgrid—Part I: A hybrid control architecture. IEEE Trans. Power Electron. 2010, 25, 2962–2970. [Google Scholar] [CrossRef]
- Kim, J.; Guerrero, J.M.; Rodriguez, P.; Teodorescu, R.; Nam, K. Mode adaptive droop control with virtual output impedances for an inverter-based flexible AC microgrid. IEEE Trans. Power Electron. 2010, 26, 689–701. [Google Scholar] [CrossRef]
- Delghavi, M.B.; Yazdani, A. An adaptive feedforward compensation for stability enhancement in droop-controlled inverter-based microgrids. IEEE Trans. Power Deliv. 2011, 26, 1764–1773. [Google Scholar] [CrossRef]
- Yazdanian, M.; Mehrizi-Sani, A. Washout filter-based power sharing. IEEE Trans. Smart Grid 2015, 7, 967–968. [Google Scholar] [CrossRef]
- Mc Namara, P.; Negenborn, R.R.; De Schutter, B.; Lightbody, G. Optimal coordination of a multiple HVDC link system using centralized and distributed control. IEEE Trans. Control Syst. Technol. 2012, 21, 302–314. [Google Scholar] [CrossRef]
- Moradzadeh, M.; Boel, R.; Vandevelde, L. Voltage coordination in multi-area power systems via distributed model predictive control. IEEE Trans. Power Syst. 2012, 28, 513–521. [Google Scholar] [CrossRef]
- Roshany-Yamchi, S.; Cychowski, M.; Negenborn, R.R.; De Schutter, B.; Delaney, K.; Connell, J. Kalman filter-based distributed predictive control of large-scale multi-rate systems: Application to power networks. IEEE Trans. Control Syst. Technol. 2011, 21, 27–39. [Google Scholar] [CrossRef]
- Yazdanian, M.; Mehrizi-Sani, A. Distributed control techniques in microgrids. IEEE Trans. Smart Grid 2014, 5, 2901–2909. [Google Scholar] [CrossRef]
- Tsitsiklis, J.; Bertsekas, D.; Athans, M. Distributed asynchronous deterministic and stochastic gradient optimization algorithms. IEEE Trans. Autom. Control 1986, 31, 803–812. [Google Scholar] [CrossRef] [Green Version]
- Keviczky, T.; Borrelli, F.; Fregene, K.; Godbole, D.; Balas, G.J. Decentralized receding horizon control and coordination of autonomous vehicle formations. IEEE Trans. Control Syst. Technol. 2007, 16, 19–33. [Google Scholar] [CrossRef]
- Frazzoli, E.; Bullo, F. Decentralized algorithms for vehicle routing in a stochastic time-varying environment. In Proceedings of the 2004 43rd IEEE Conference on Decision and Control (CDC) (IEEE Cat. No. 04CH37601), Nassau, Bahamas, 14–17 December 2004; IEEE: Piscataway, NJ, USA, 2004. [Google Scholar]
- Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and cooperation in networked multi-agent systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef]
- Russell, S.; Norvig, P. Artificial Intelligence: A Modern Approach, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2003. [Google Scholar]
- Negenborn, R.R.; De Schutter, B.; Hellendoorn, J. Multi-agent model predictive control for transportation networks: Serial versus parallel schemes. Eng. Appl. Artif. Intell. 2008, 21, 353–366. [Google Scholar] [CrossRef] [Green Version]
- McArthur, S.D.; Davidson, E.M.; Catterson, V.M.; Dimeas, A.L.; Hatziargyriou, N.D.; Ponci, F.; Funabashi, T. Multi-agent systems for power engineering applications—Part I: Concepts, approaches, and technical challenges. IEEE Trans. Power Syst. 2007, 22, 1743–1752. [Google Scholar] [CrossRef]
- Manitoba HVDC Research Centre. PSCAD Users Guide. 2018. Available online: https://hvdc.ca/uploads/knowledge_base/pscad_manual_v4_6.pdf?t=1528395602 (accessed on 2 May 2018).
- Filizadeh, S.; Heidari, M.; Mehrizi-Sani, A.; Jatskevich, J.; Martinez, J.A. Techniques for interfacing electromagnetic transient simulation programs with general mathematical tools IEEE taskforce on interfacing techniques for simulation tools. IEEE Trans. Power Deliv. 2008, 23, 2610–2622. [Google Scholar] [CrossRef]
- Baran, M.; Sreenath, R.; Mahajan, N.R. ESMO 2003. IEEE Power Eng. Rev. 2002, 22, 16. [Google Scholar]
- Cai, N.; Mitra, J. A decentralized control architecture for a microgrid with power electronic interfaces. In Proceedings of the North American Power Symposium 2010, Arlington, TX, USA, 26–28 September 2010. [Google Scholar]
- Dou, C.X.; Liu, B. Multi-agent based hierarchical hybrid control for smart microgrid. IEEE Trans. Smart Grid 2013, 4, 771–778. [Google Scholar] [CrossRef]
- Nedic, A.; Ozdaglar, A. Distributed subgradient methods for multi-agent optimization. IEEE Trans. Autom. Control 2009, 54, 48. [Google Scholar] [CrossRef]
- Nedic, A.; Ozdaglar, A.; Parrilo, P.A. Constrained consensus and optimization in multi-agent networks. IEEE Trans. Autom. Control 2010, 55, 922–938. [Google Scholar] [CrossRef]
- Beccuti, A.G.; Demiray, T.H.; Andersson, G.; Morari, M. A Lagrangian decomposition algorithm for optimal emergency voltage control. IEEE Trans. Power Syst. 2010, 25, 1769–1779. [Google Scholar] [CrossRef]
- Ravindran, A.; Reklaitis, G.V.; Ragsdell, K.M. Engineering Optimization: Methods and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Conejo, A.J.; Castillo, E.; Minguez, R.; Garcia-Bertrand, R. Decomposition Techniques in Mathematical Programming: Engineering and Science Applications; Springer Science & Business Media: Berlin, Germany, 2006. [Google Scholar]
- Hug-Glanzmann, G.; Andersson, G. Decentralized optimal power flow control for overlapping areas in power systems. IEEE Trans. Power Syst. 2009, 24, 327–336. [Google Scholar] [CrossRef]
- Kim, B.H.; Baldick, R. A comparison of distributed optimal power flow algorithms. IEEE Trans. Power Syst. 2000, 15, 599–604. [Google Scholar] [CrossRef]
- Baldick, R.; Kim, B.H.; Chase, C.; Luo, Y. A fast distributed implementation of optimal power flow. IEEE Trans. Power Syst. 1999, 14, 858–864. [Google Scholar] [CrossRef]
- Guo, F.; Wen, C.; Mao, J.; Song, Y.D. Distributed secondary voltage and frequency restoration control of droop-controlled inverter-based microgrids. IEEE Trans. Ind. Electron. 2014, 62, 4355–4364. [Google Scholar] [CrossRef]
- Zuo, S.; Davoudi, A.; Song, Y.; Lewis, F.L. Distributed finite-time voltage and frequency restoration in islanded AC microgrids. IEEE Trans. Ind. Electron. 2016, 63, 5988–5997. [Google Scholar] [CrossRef]
- Xia, Y.; Zhang, J.; Lu, K. Adaptive Attitude Tracking Control for Rigid Spacecraft with Finite-Time Convergence. In Finite Time and Cooperative Control of Flight Vehicles; Springer: Singapore, 2019; pp. 51–69. [Google Scholar] [CrossRef]
- Dehkordi, N.M.; Sadati, N.; Hamzeh, M. Distributed robust finite-time secondary voltage and frequency control of islanded microgrids. IEEE Trans. Power Syst. 2016, 32, 3648–3659. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, H.; Li, C. Distributed finite-time cooperative control of droop-controlled microgrids under switching topology. IET Renew. Power Gener. 2016, 11, 707–714. [Google Scholar] [CrossRef]
- Xu, Y. Robust finite-time control for autonomous operation of an inverter-based microgrid. IEEE Trans. Ind. Inform. 2017, 13, 2717–2725. [Google Scholar] [CrossRef]
- Lu, X.; Yu, X.; Lai, J.; Wang, Y.; Guerrero, J.M. A novel distributed secondary coordination control approach for islanded microgrids. IEEE Trans. Smart Grid 2016, 9, 2726–2740. [Google Scholar] [CrossRef]
- Zhang, D.; Shi, P.; Yu, L. Containment control of linear multiagent systems with aperiodic sampling and measurement size reduction. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 5020–5029. [Google Scholar] [CrossRef]
- Ding, L.; Han, Q.L.; Ge, X.; Zhang, X.M. An overview of recent advances in event-triggered consensus of multiagent systems. IEEE Trans. Cybern. 2017, 48, 1110–1123. [Google Scholar] [CrossRef]
- Zhou, J.; Zhang, H.; Sun, Q.; Ma, D.; Huang, B. Event-based distributed active power sharing control for interconnected AC and DC microgrids. IEEE Trans. Smart Grid 2017, 9, 6815–6828. [Google Scholar] [CrossRef]
- Sahoo, S.; Mishra, S. An Adaptive Event-Triggered Communication-Based Distributed Secondary Control for DC Microgrids. IEEE Trans. Smart Grid 2017, 9, 6674–6683. [Google Scholar] [CrossRef]
- Fan, Y.; Hu, G.; Egerstedt, M. Distributed reactive power sharing control for microgrids with event-triggered communication. IEEE Trans. Control Syst. Technol. 2016, 25, 118–128. [Google Scholar] [CrossRef]
- Tahir, M.; Mazumder, S.K. Self-triggered communication enabled control of distributed generation in microgrids. IEEE Trans. Ind. Inform. 2015, 11, 441–449. [Google Scholar] [CrossRef]
- Han, R.; Meng, L.; Guerrero, J.M.; Vasquez, J.C. Distributed nonlinear control with event-triggered communication to achieve current-sharing and voltage regulation in DC microgrids. IEEE Trans. Power Electron. 2017, 33, 6416–6433. [Google Scholar] [CrossRef]
- Zhang, R.; Hredzak, B. Distributed Control System with Aperiodic Time-Delayed Sampled Data for Batteries and Renewable Energy Sources in Microgrid. IEEE Trans. Sustain. Energy 2019. [Google Scholar] [CrossRef]
- Shen, X.; Wang, H.; Li, J.; Su, Q.; Gao, L. Distributed Secondary Voltage Control of Islanded Microgrids Based on RBF-Neural-Network Sliding-Mode Technique. IEEE Access 2019, 7, 65616–65623. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, Q.; Wang, C.; Wang, N. A control strategy for microgrid inverters based on adaptive three-order sliding mode and optimized droop controls. Electr. Power Syst. Res. 2014, 117, 192–201. [Google Scholar] [CrossRef]
- He, J.; Lu, C.; Jin, X.; Li, P. Analysis of time delay effects on wide area damping control. In Proceedings of the APCCAS 2008-2008 IEEE Asia Pacific Conference on Circuits and Systems IEEE, Macao, China, 30 November–3 December 2008. [Google Scholar]
- Shi, Y.; Huang, J.; Yu, B. Robust tracking control of networked control systems: Application to a networked DC motor. IEEE Trans. Ind. Electron. 2012, 60, 5864–5874. [Google Scholar] [CrossRef]
- Li, H.; Sun, Z.; Chow, M.Y.; Sun, F. Gain-scheduling-based state feedback integral control for networked control systems. IEEE Trans. Ind. Electron. 2010, 58, 2465–2472. [Google Scholar] [CrossRef]
- Mazumder, S.K.; Tahir, M.; Acharya, K. Master–slave current-sharing control of a parallel DC–DC converter system over an RF communication interface. IEEE Trans. Ind. Electron. 2008, 55, 59–66. [Google Scholar] [CrossRef]
- Liu, F.; Gao, H.; Qiu, J.; Yin, S.; Fan, J.; Chai, T. Networked multirate output feedback control for setpoints compensation and its application to rougher flotation process. IEEE Trans. Ind. Electron. 2013, 61, 460–468. [Google Scholar] [CrossRef]
- Lian, F.-L.; Moyne, W.; Tilbury, D. Network design consideration for distributed control systems. IEEE Trans. Control Syst. Technol. 2002, 10, 297–307. [Google Scholar] [CrossRef]
- Bukowski, S.; Ranade, S.J. Communication network requirements for the smart grid and a path for an IP based protocol for customer driven microgrids. In Proceedings of the 2012 IEEE Energytech, Cleveland, OH, USA, 29–31 May 2012. [Google Scholar]
- Wang, D.; Wang, Z.; Chen, M.; Wang, W. Distributed optimization for multi-agent systems with constraints set and communication time-delay over a directed graph. Inf. Sci. 2018, 438, 1–4. [Google Scholar] [CrossRef]
- Jiang, L.; Yao, W.; Wu, Q.H.; Wen, J.Y.; Cheng, S.J. Delay-dependent stability for load frequency control with constant and time-varying delays. IEEE Trans. Power Syst. 2011, 27, 932–941. [Google Scholar] [CrossRef]
- Hongjie, J.; Xiaodan, Y. A simple method for power system stability analysis with multiple time delays. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting—Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008. [Google Scholar]
- Liu, S.; Wang, X.; Liu, P.X. Impact of communication delays on secondary frequency control in an islanded microgrid. IEEE Trans. Ind. Electron. 2014, 62, 2021–2031. [Google Scholar] [CrossRef]
- Nie, Y.; Dong, M.; Yuan, W.; Yang, J.; Liu, Z.; Han, H. Stabilization methods of DC Microgrid with distributed control considering communication delay. In Proceedings of the 2017 IEEE 3rd International Future Energy Electronics Conference and ECCE Asia (IFEEC 2017—ECCE Asia), Kaohsiung, Taiwan, 3–7 June 2017. [Google Scholar]
- Bai, J.; Wen, G.; Rahmani, A.; Yu, Y. Distributed formation control of fractional-order multi-agent systems with absolute damping and communication delay. Int. J. Syst. Sci. 2015, 46, 2380–2392. [Google Scholar] [CrossRef]
- Proakis, G. Digital Communications; McGraw-Hill: New York, NY, USA, 1995. [Google Scholar]
- Hanley, M.A. Frequency Instability Problems in North American Interconnections; Technical Report; National Energy Technology Laboratory: Pittsburgh, PA, USA, 2011. [Google Scholar]
- Simpson-Porco, W.; Shafiee, Q.; Drfler, F.; Vasquez, J.C.; Guerrero, J.M.; Bullo, F. Secondary frequency and voltage control of islanded microgrids via distributed averaging. IEEE Trans. Ind. Electron. 2015, 62, 7025–7038. [Google Scholar] [CrossRef]
- Bidram, A.; Lewis, F.L.; Davoudi, A. Distributed control systems for small-scale power networks: Using multiagent cooperative control theory. IEEE Control Syst. Mag. 2014, 34, 56–77. [Google Scholar]
- Shafiee, Q.; Guerrero, J.M.; Vasquez, J.C. Distributed secondary control for islanded microgrids A novel approach. IEEE Trans. Power Electron. 2014, 29, 1018–1031. [Google Scholar] [CrossRef]
- Dehkordi, N.M.; Baghaee, H.R.; Sadati, N.; Guerrero, J.M. Distributed noise-resilient secondary voltage and frequency control for islanded microgrids. IEEE Trans. Smart Grid. 2018, 10, 3780–3790. [Google Scholar] [CrossRef]
- Hu, J.; Feng, G. Distributed tracking control of leader follower multi-agent systems under noisy measurement. Automatica 2010, 46, 1382–1387. [Google Scholar] [CrossRef]
- Shrivastava, S.; Subudhi, B.; Das, S. Noise-resilient voltage and frequency synchronisation of an autonomous microgrid. IET Gener. Transm. Distrib. 2018, 13, 189–200. [Google Scholar] [CrossRef]
- Minero, P.; Franceschetti, M.; Dey, S.; Nair, G.N. Data rate theorem for stabilization over time-varying feedback channels. IEEE Trans. Autom. Control 2009, 54, 243–255. [Google Scholar] [CrossRef]
- Cervin, A.; Henriksson, D.; Ohlin, M. TrueTime 2.0-Reference Manual; Lund Institute of Technology: Lund, Sweden, 2007. [Google Scholar]
- Liang, Y.; Chen, T.W.; Pan, Q. Optimal linear state estimator with multiple packet dropout. IEEE Trans. Autom. Control 2010, 55, 1428–1433. [Google Scholar] [CrossRef]
- Baghaee, H.R.; Mirsalim, M.; Gharehpetian, G.B.; Talebi, H.A. Three phase AC/DC power-flow for balanced/unbalanced microgrids including wind/solar, droop controlledand electronically-coupled distributed energy resources using RBF neural networks. IET Power Electron 2017, 10, 313–328. [Google Scholar] [CrossRef]
- Fani, B.; Zandi, F.; Karami-Horestani, A. An enhanced decentralized reactive power sharing strategy for inverter-based microgrid. Int. J. Electr. Power Energy Syst. 2018, 98, 531–542. [Google Scholar] [CrossRef]
- Hashmi, K.; Mansoor Khan, M.; Jiang, H.; Umair Shahid, M.; Habib, S.; Talib Faiz, M.; Tang, H.A. Virtual micro-islanding-based control paradigm for renewable microgrids. Electronics 2018, 7, 105. [Google Scholar] [CrossRef]
- Shahid, M.; Khan, M.; Hashmi, K.; Habib, S.; Jiang, H.; Tang, H. A control methodology for load sharing system restoration in islanded DC micro grid with faulty communication links. Electronics 2018, 7, 90. [Google Scholar] [CrossRef]
- Imran, R.M.; Wang, S.; Flaih, F.M. DQ-Voltage Droop Control and Robust Secondary Restoration with Eligibility to Operate During Communication Failure in Autonomous Microgrid. IEEE Access 2018, 7, 6353–6361. [Google Scholar] [CrossRef]
- Schaich, R.M.; Müller, M.A.; Allgöwer, F. A distributed model predictive control scheme for networks with communication failure. IFAC Proc. Vol. 2014, 47, 12004–12009. [Google Scholar] [CrossRef] [Green Version]
- Luo, T.; Zhang, S.; Liu, J. Analysis on Improvement Scheme of Distribution Network Communication Network Management. In Proceedings of the 2019 International Conference on Communications, Information System and Computer Engineering (CISCE), Haikou, China, 5–7 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 337–342. [Google Scholar]
- Bashian, A.; Assili, M.; Anvari-Moghaddam, A.; Marouzi, O.R. Co-optimal PMU and communication system placement using hybrid wireless sensors. Sustain. Energy Grids Netw. 2019, 19, 100238. [Google Scholar] [CrossRef]
- Chen, J. Research on Power System Automation Communication Technology for Smart Grid. IOP Conf. Ser. Mater. Sci. Eng. 2019, 569, 042025. [Google Scholar] [CrossRef]
- Luo, T.; Zhang, S.; Liu, J. Design of centralized control architecture for distribution network communication network based on SDN. In Proceedings of the 2019 International Conference on Communications, Information System, and Computer Engineering, CISCE, Haikou, China, 5–7 July 2019. [Google Scholar]
- Artale, G.; Cataliotti, A.; Cosentino, V.; Di Cara, D.; Guaiana, S.; Nuccio, S.; Panzavecchia, N.; Tinè, G. Smart Interface Devices for Distributed Generation in Smart Grids: The Case of Islanding. IEEE Sens. J. 2017, 17, 7803–7811. [Google Scholar] [CrossRef]
- Zhang, J.; Ansari, N. Toward energy-efficient 1G-EPON and 10G-EPON with sleep-aware MAC control and scheduling. IEEE Commun. Mag. 2011, 49, s33–s38. [Google Scholar] [CrossRef]
- Wang, L.; Manner, J. Energy Consumption Analysis of WLAN, 2G and 3G interfaces. In Proceedings of the 2010 IEEE/ACM Int’l Conference on Green Computing and Communications & Int’l Conference on Cyber, Physical and Social Computing, Hangzhou, China, 18–20 December 2010; IEEE Computer Society: Washington, DC, USA, 2010. [Google Scholar]
- Mo, Y.; Kim, T.H.J.; Brancik, K.; Dickinson, D.; Lee, H.; Perrig, A.; Sinopoli, B. Cyber–physical security of a smart grid infrastructure. Proc. IEEE 2012, 100, 195–209. [Google Scholar]
- Liu, Y.; Ning, P.; Reiter, M.K. False data injection attacks against state estimation in electric power grids. ACM Trans. Inf. Syst. Sec. 2011, 14, 13. [Google Scholar] [CrossRef]
- Bobba, R.B.; Rogers, K.M.; Wang, Q.; Khurana, H.; Nahrstedt, K.; Overbye, T.J. Detecting false data injection attacks on DC state estimation. In Proceedings of the 1st Workshop Secure Control Systems (CPSWEEK), Stockholm, Sweden, 12 April 2010; pp. 1–9. [Google Scholar]
- Kosut, O.; Jia, L.; Thomas, R.J.; Tong, L. Malicious data attacks on the smart grid. IEEE Trans. Smart Grid 2011, 2, 645–658. [Google Scholar] [CrossRef]
- He, Y.; Mendis, G.J.; Wei, J. Real-time detection of false data injection attacks in smart grid: A deep learning-based intelligent mechanism. IEEE Trans. Smart Grid 2017, 8, 2505–2516. [Google Scholar] [CrossRef]
- Chaudhari, S.S.; Biradar, R.C. Survey of bandwidth estimation techniques in communication networks. Wirel. Pers. Commun. 2015, 83, 1425–1476. [Google Scholar] [CrossRef]
- IEEE 802.3 Ethernet Working Group. IEEE 802.3 Industry Connections Feasibility Assessment for Next Generation of EPON. 2015. Available online: http://www.ieee802.org/secmail/pdfPUXmqX0_Bq.pdf (accessed on 24 April 2015).
- Staehle, D.; Leibnitz, K.; Tsipotis, K. QoS of internet access with GPRS. Wirel. Netw. 2003, 9, 213–222. [Google Scholar] [CrossRef]
- Massey, D. Timeline of Telecommunications. Telephone Tribute. 2009. Available online: http://http://www.telephonetribute.com/timeline.html (accessed on 30 August 2009).
- IEEE Approves IEEE 802.16m—Advanced Mobile Broadband Wireless Standard; News Release March 31, 2011; IEEE Standards Association: Piscataway, NJ, USA, 2011.
- Echelon Announces ISO/IEC Standardization of LonWorks® Control Networks; News Release 3 December 2008; Echelon Corporation: San Jose, CA, USA, 2011.
- IEEE Standard for Information Technology—Telecommunications and Information Exchange Between Systems—Local and Metropolitan Area Networks—Specific Requirements—Part 3: Carrier Sense Multiple Access with Collision Detection (CSMA/CD) Access Method and Physical Layer Specifications; IEEE Std 802.3-2008; IEEE: Piscataway, NJ, USA, 2008.
- Steinder, M.; Sethi, A.S. Non-deterministic diagnosis of end-to-end service failures in a multi-layer communication system. In Proceedings of the Tenth International Conference on Computer Communications and Networks (Cat. No. 01EX495), Scottsdale, AZ, USA, 15–17 October 2001; IEEE: Piscataway, NJ, USA, 2001; pp. 374–379. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distributed Method | Advantages | Disadvantages |
|---|---|---|
| Droop-Based Methods |
|
|
| MPC Control-Based Methods |
|
|
| Consensus-Based Methods |
|
|
| Agent-Based Methods |
|
|
| Decomposition-Based Methods |
|
|
| Finite-Time Convergence Control Methods |
|
|
| Aperiodic Sampling Data-Based Control Methods |
|
|
| RBF Neural Network Sliding Mode Control Methods |
|
|
| Type of Communication Degradation Process | Method | Advantages | Disadvantages |
|---|---|---|---|
| Delay | [83] |
|
|
| [84] | |||
| [85] | |||
| Noise | [91] |
|
|
| [92] | |||
| [93] | |||
| Packet Dropout | [96] |
|
|
| [97] | |||
| Communication Failure | [100] |
|
|
| [101] | |||
| [102] |
| Technology | Application | Advantages | Disadvantages |
|---|---|---|---|
| GPRS |
|
|
|
| Wireless Narrowband Private Network |
|
|
|
| WIMAX |
|
|
|
| PLC |
|
|
|
| EPON |
|
|
|
| Data Type | Data Flow | Delay | Safety Requirements |
|---|---|---|---|
| Telecommunication | >128 bit/s | Delay <100 ms | Allow public network transmission |
| Telemetry | >1024 bit/s | Delay <100 ms | Allow public network transmission |
| Telecontrol | >128 bit/s | Delay <100 ms | Control commands require secure channel guarantee |
| Monitoring | >2.4 kbit/s | Delay <100 ms | Allow public network transmission |
| Application | Communication Protocol |
|---|---|
| Distributed Energy Resources (DER) control | IEC 61850 |
| Demand response | IEC 61968 |
| (Advanced Metering Infrastructure) AMI | IEC 61968 |
| Synchro phasors | IEEE C37.118.1 |
| Transmission automation | IEC 60870-5 or DNP3 |
| Substation automation | IEC 61850 |
| Tele-protection relays | IEC 60834 or IEEE C37.236 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aghaee, F.; Mahdian Dehkordi, N.; Bayati, N.; Hajizadeh, A. Distributed Control Methods and Impact of Communication Failure in AC Microgrids: A Comparative Review. Electronics 2019, 8, 1265. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics8111265
Aghaee F, Mahdian Dehkordi N, Bayati N, Hajizadeh A. Distributed Control Methods and Impact of Communication Failure in AC Microgrids: A Comparative Review. Electronics. 2019; 8(11):1265. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics8111265
Chicago/Turabian StyleAghaee, Fateme, Nima Mahdian Dehkordi, Navid Bayati, and Amin Hajizadeh. 2019. "Distributed Control Methods and Impact of Communication Failure in AC Microgrids: A Comparative Review" Electronics 8, no. 11: 1265. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics8111265