
Optimizing the Sampling Area across an Old-Growth Forest via UAV-Borne Laser Scanning, GNSS, and Radial Surveying

 ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Materials
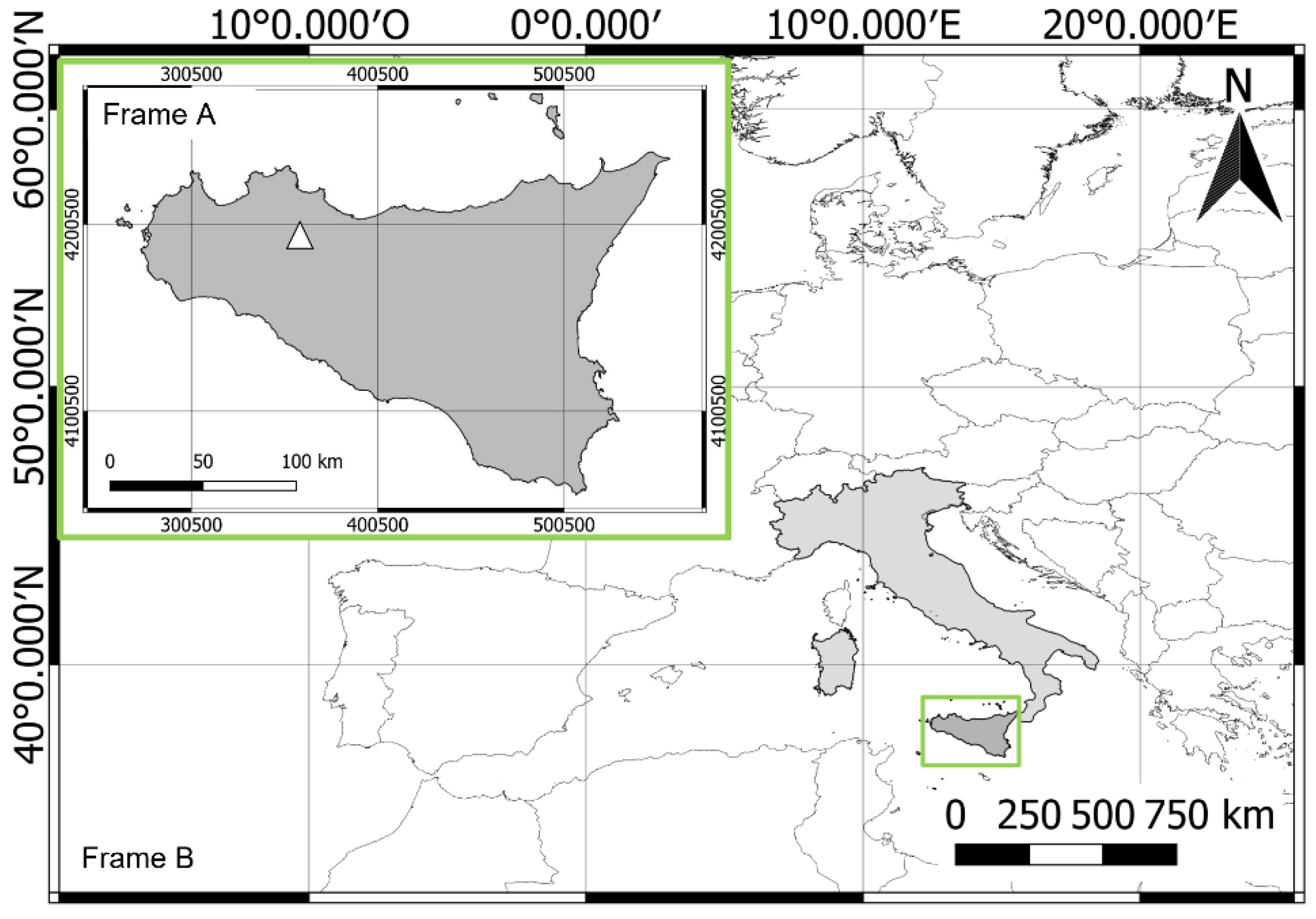
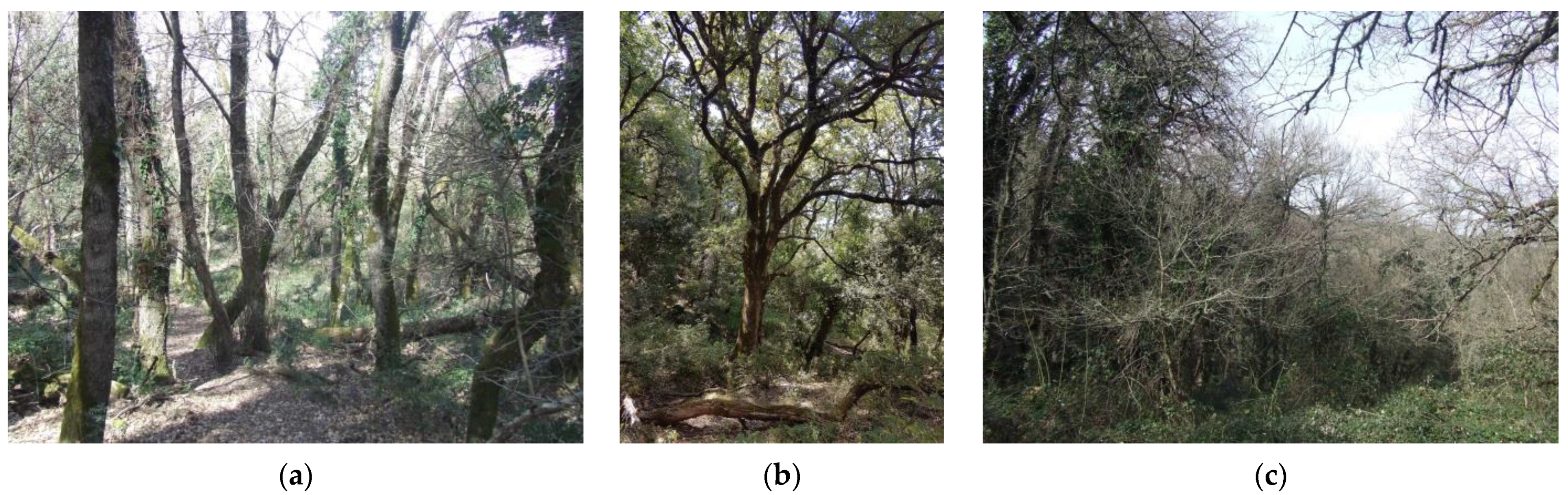
2.1. Study Area
2.2. Forest Structural Attributes Data
2.3. UAV-Borne Laser Scanning Data
2.4. Topographic and Expeditious Surveys
- −
- MAGNET Tools and Topcon Tools ver. 8.2.3, developed by Topcon Corporation (Tokyo, Japan). The software allows data processing from different devices such as total stations, digital levels, and GNSS receivers, and it is used in most technical–scientific applications [57,58,59]. Topcon Tools includes different models for tropospheric correction, such as the Modified Hopfield Model [60,61,62] with the NRLMSISE meteorological model, in extenso the United States Naval Research Laboratory Mass Spectrometer Incoherent Scatter Radar model [63]. Baseline processing can take place either with the GPS or GLONASS constellations or a combination of the two (GPS+).
- −
- Meridiana ver. 2020, developed by Geopro (Topcon Positioning Italy, Ancona, Italy). The tool allows the geographical congruence to be analyzed and outliers of the total station data to be checked, assuming a given set of tolerances. Depending on the data available, the software uses the following calculation methods: roto-translation (rigid or least-squares, with fixed or variable scaling factor), Snellius, and Ex-center.
- −
- The theoretical number of satellites, for the given cutoff angle, was calculated using the Trimble GNSS planning online software [64].
3. Methods
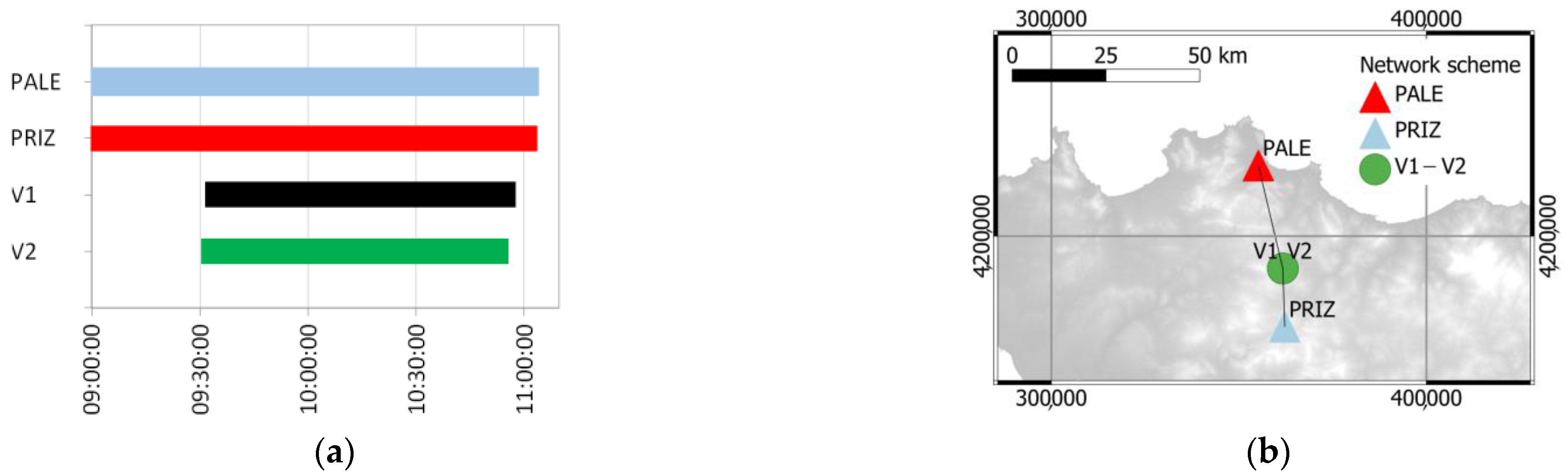
3.1. Data Collection
3.2. UAVLS Data Processing
3.3. Semivariogram Analysis
4. Results and Discussion
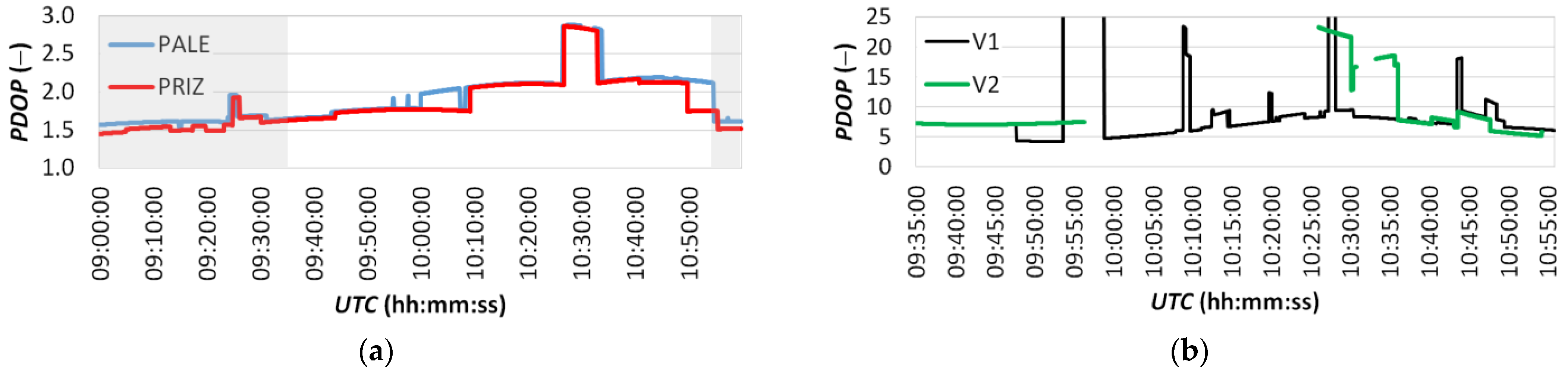
4.1. Tree Positioning via GNSS CORS and Total Station
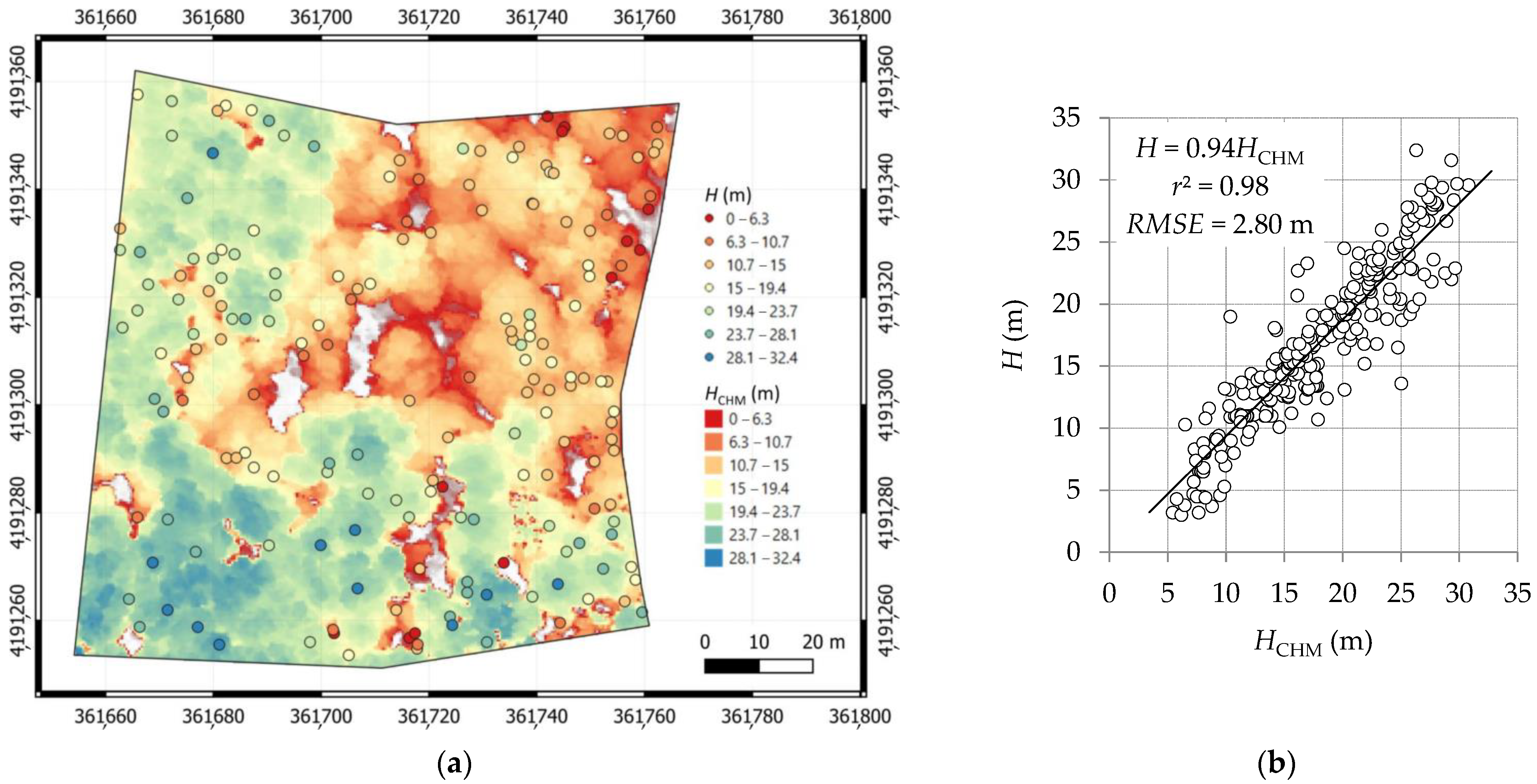
4.2. LIDAR Statistics and Trees’ Topographic Positioning Accuracy
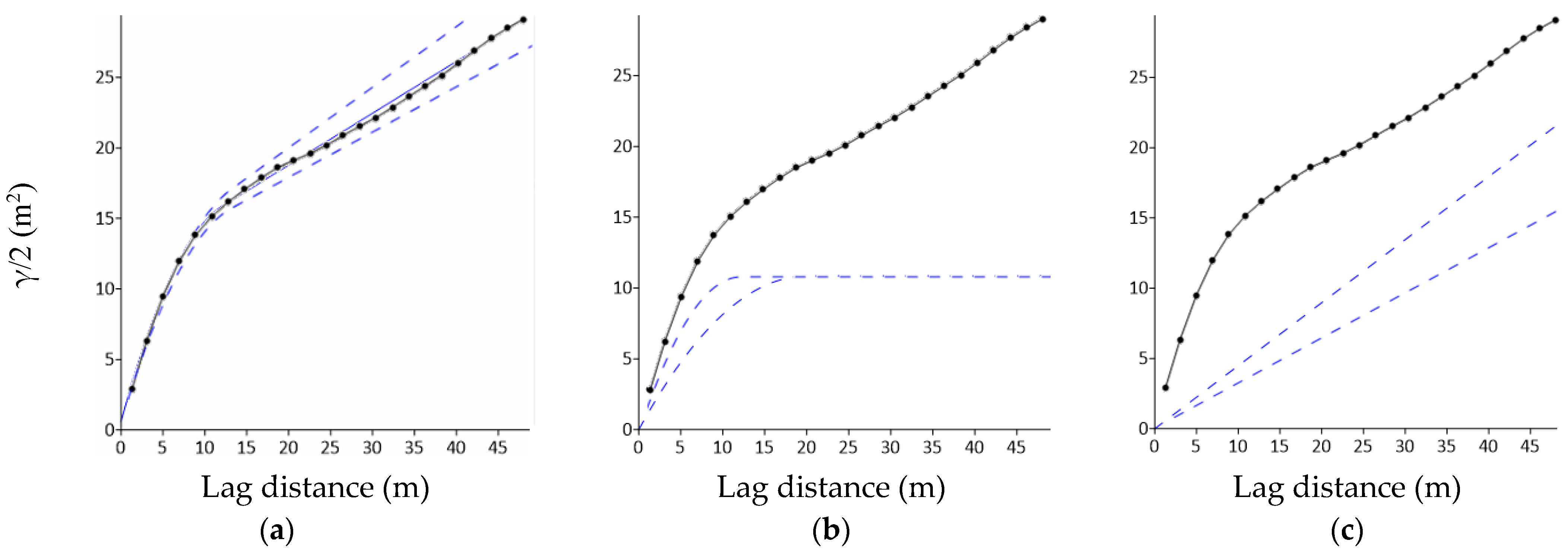
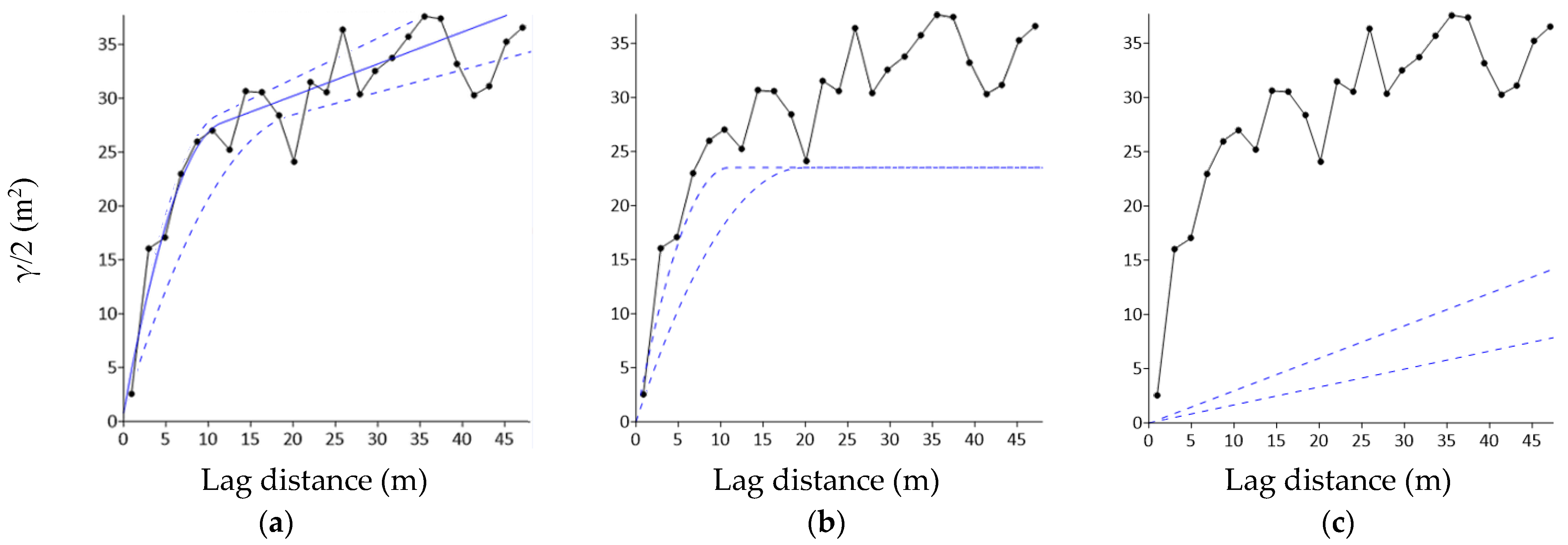
4.3. Semivariogram Analysis
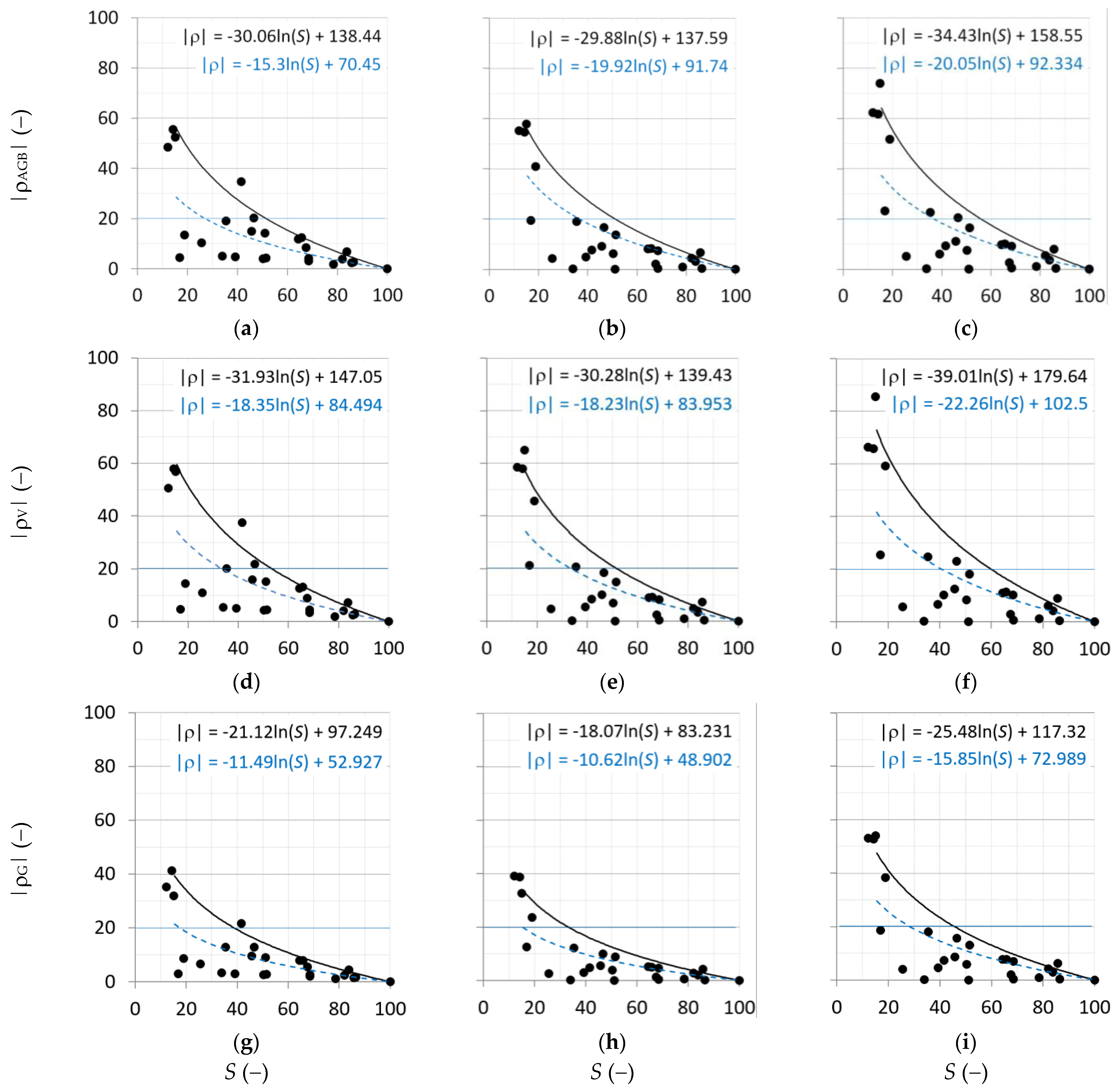
4.4. Sampling Area Optimization
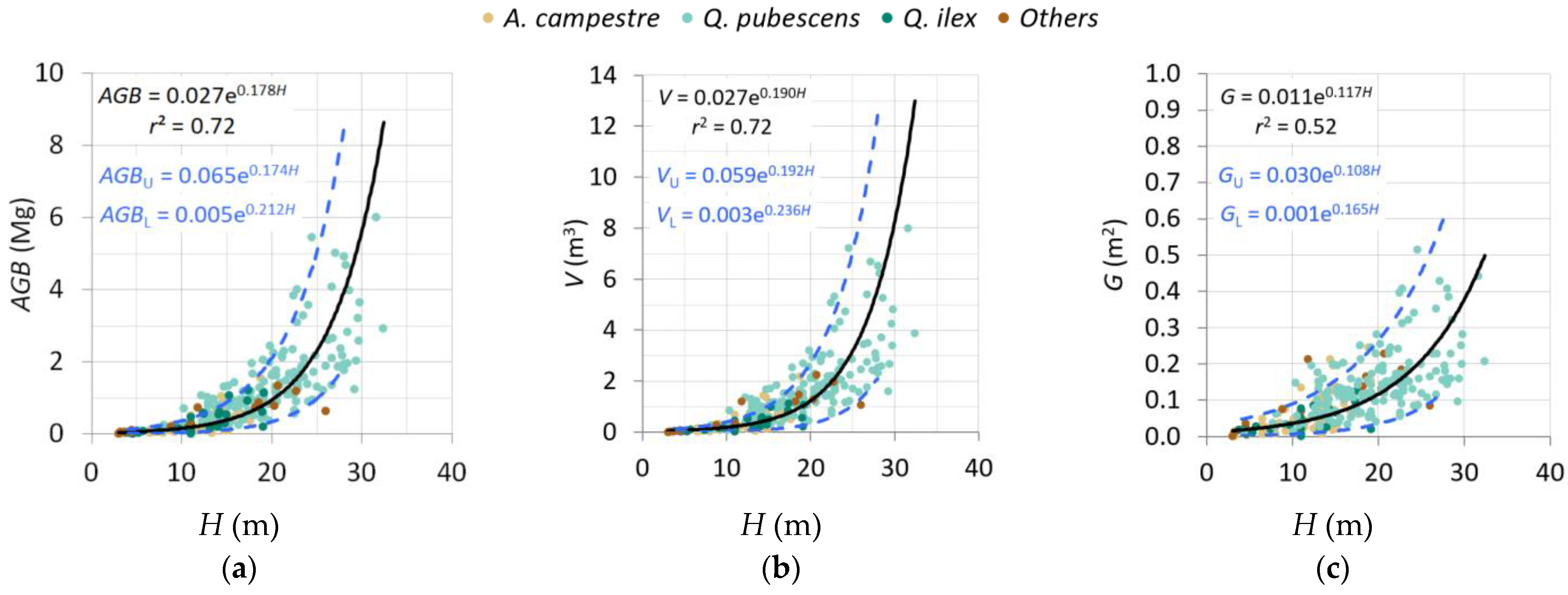
- −
- a forest surface between 51% (based on AGBL, panel c black curve) and 56% (based on AGBU, panel b black curve), corresponding to an average error varying between 13% (AGBL, blue dashed curve) and 12% (AGBU, blue dashed curve);
- −
- a forest surface between 52% (based on VL, panel f black curve) and 60% (based on VU, panel e black curve), corresponding to an average error varying between 12% (VL, blue dashed curve) and 11% (VU, blue dashed curve);
- −
- a forest surface between 33% (based on GL, panel i, black curve) and 46% (based on GU, panel h black curve), corresponding to an average error of 12% (for both GL and GU, blue dashed curves).
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
| Acronym and Symbol | Meaning | Unit |
| ALS | Airborne laser scanning | |
| CHM | Canopy height model | |
| CODE DIFF | Code-based differential | |
| CORS | Continuously Operating Reference Stations | |
| EPN | EUREF Permanent Network | |
| EUREF | Reference Frame Sub-Commission for Europe | |
| LiDAR | Light detection and ranging | |
| IGMI | Istituto Geografico Militare Italiano | |
| IR | Infrared | |
| INS | Inertial navigation system | |
| IUSS | International Union of Soil Sciences | |
| GLONASS | Global Navigation Satellite System (in Russian: Global’naja Navigacionnaja Sputnikovaja Sistema) | |
| GPS | Global Positioning System | |
| GPS+ | GPS plus GLONASS positioning | |
| GNSS | Global Navigation Satellite System | |
| NRLMSISE | United States Naval Research Laboratory Mass Spectrometer–Incoherent Scatter Radar | |
| MEMS | Micro-electro-mechanical systems | |
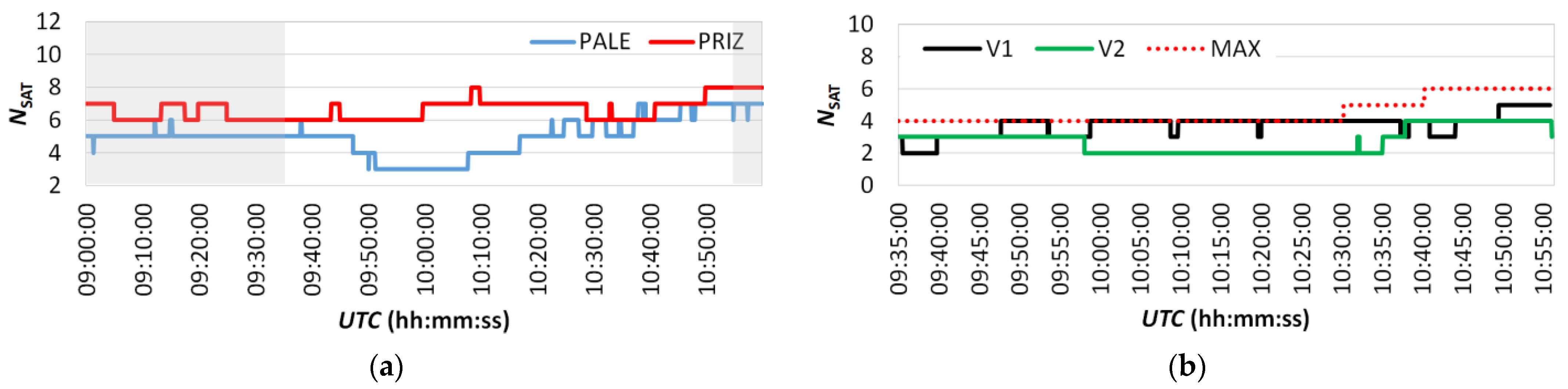
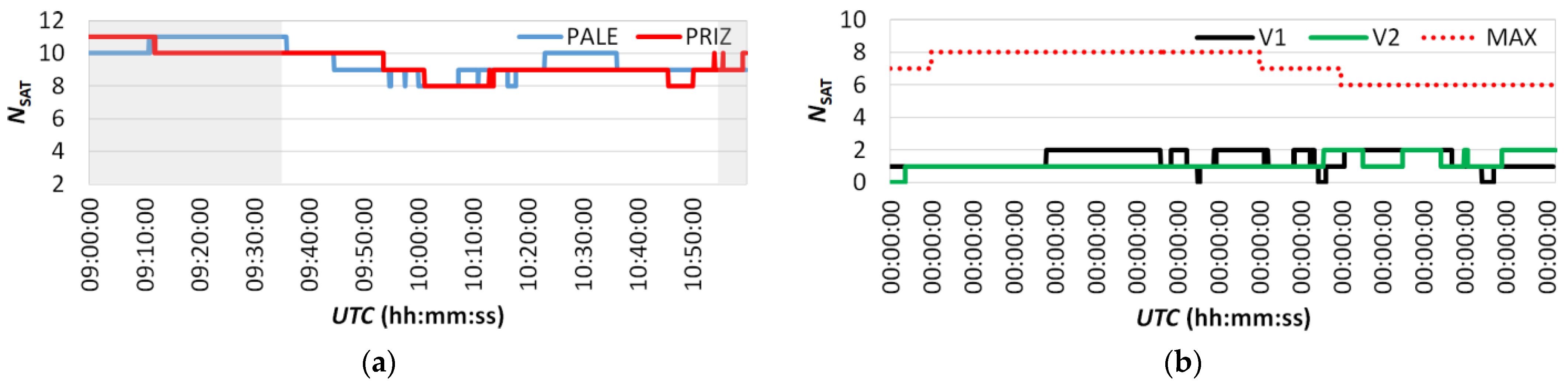
| PALE | CORS permanent station in Palermo | |
| PRIZ | CORS permanent station in Prizzi | |
| UAV | Unmanned Aerial Vehicle | |
| UAVLS | UAV-borne laser scanning | |
| UNIPA | University of Palermo | |
| V1 and V2 | GNSS reference landmarks | |
| V3 | Total station positioning | |
| RGB-D | Red Green Blue-Depth | |
| RINEX | Receiver Independent Exchange | |
| RTK | Real time kinematic | |
| SAC | Special Areas of Conservation | |
| SLAM | Simultaneous Localization and Mapping | |
| AGB | Aboveground biomass | Mg |
| DBH | Diameter at breast height | (m) |
| DSM | Digital surface model | (m a.s.l.) |
| DTM | Digital terrain model | (m a.s.l.) |
| H | Tree height measured in situ | (m) |
| HCHM | Tree height from CHM | (m) |
| G | Basal area | (m2) |
| PDOP | Position DOP | (-) |
| RMSE | Root mean squared error | (as the input variable) |
| S | Sampling area | (m2) |
| SNR | Signal-to-noise ratio | (-) |
| UTC | Universal Time Coordinated | (hh:mm:ss) |
| V | Growing stock volume | (m3) |
| γ/2 | Semivariance | (square of the input units) |
| ρAGB | Relative error of AGB | (-) |
| ρG | Relative error of G | (-) |
| ρV | Relative error of V | (-) |
References
- Liu, C.J.; Brantigan, R. Using Differential GPS for Forest Traverse Surveys. Can. J. For. Res. 1995, 25, 1795–1805. [Google Scholar] [CrossRef]
- Sofia, S.; Sferlazza, S.; Mariottini, A.; Niccolini, M.; Coppi, T.; Miozzo, M.; La Mantia, T.; Maetzke, F. A Case Study of The Application of Hand-Held Mobile Laser Scanning in The Planning of An Italian Forest (Alpe Di Catenaia, Tuscany). Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2021, XLIII-B2-2021, 763–770. [Google Scholar] [CrossRef]
- Krause, S.; Sanders, T.G.M.; Mund, J.-P.; Greve, K. UAV-Based Photogrammetric Tree Height Measurement for Intensive Forest Monitoring. Remote Sens. 2019, 11, 758. [Google Scholar] [CrossRef] [Green Version]
- Lechner, A.M.; Foody, G.M.; Boyd, D.S. Applications in Remote Sensing to Forest Ecology and Management. One Earth 2020, 2, 405–412. [Google Scholar] [CrossRef]
- Sferlazza, S.; Maltese, A.; Ciraolo, G.; Dardanelli, G.; Maetzke, F.G.; La Mela Veca, D.S. Forest Accessibility, Madonie Mountains (Northern Sicily, Italy): Implementing a GIS Decision Support System. J. Maps 2021, 17, 476–485. [Google Scholar] [CrossRef]
- Wallace, L.; Musk, R.; Lucieer, A. An Assessment of the Repeatability of Automatic Forest Inventory Metrics Derived From UAV-Borne Laser Scanning Data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7160–7169. [Google Scholar] [CrossRef]
- Gatziolis, D.; Fried, J.S.; Monleon, V.S. Challenges to Estimating Tree Height via LiDAR in Closed-Canopy Forests: A Parable from Western Oregon. For. Sci. 2010, 56, 139–155. [Google Scholar]
- Mielcarek, M.; Stereńczak, K.; Khosravipour, A. Testing and Evaluating Different LiDAR-Derived Canopy Height Model Generation Methods for Tree Height Estimation. Int. J. Appl. Earth Obs. Geoinf. 2018, 71, 132–143. [Google Scholar] [CrossRef]
- Popescu, S.C.; Wynne, R.H.; Nelson, R.F. Estimating Plot-Level Tree Heights with Lidar: Local Filtering with a Canopy-Height Based Variable Window Size. Comput. Electron. Agric. 2002, 37, 71–95. [Google Scholar] [CrossRef]
- Wang, Y.; Lehtomäki, M.; Liang, X.; Pyörälä, J.; Kukko, A.; Jaakkola, A.; Liu, J.; Feng, Z.; Chen, R.; Hyyppä, J. Is Field-Measured Tree Height as Reliable as Believed—A Comparison Study of Tree Height Estimates from Field Measurement, Airborne Laser Scanning and Terrestrial Laser Scanning in a Boreal Forest. ISPRS J. Photogramm. Remote Sens. 2019, 147, 132–145. [Google Scholar] [CrossRef]
- Popescu, S.C.; Wynne, R.H.; Nelson, R.F. Measuring Individual Tree Crown Diameter with Lidar and Assessing Its Influence on Estimating Forest Volume and Biomass. Can. J. Remote Sens. 2003, 29, 564–577. [Google Scholar] [CrossRef]
- Coops, N.C.; Hilker, T.; Wulder, M.A.; St-Onge, B.; Newnham, G.; Siggins, A.; Trofymow, J.A. Estimating Canopy Structure of Douglas-Fir Forest Stands from Discrete-Return LiDAR. Trees-Struct. Funct. 2007, 21, 295–310. [Google Scholar] [CrossRef] [Green Version]
- Roberts, S.; Dean, T.J.; Evans, D.L.; McCombs, J.; Harrington, R.L.; Glass, P.A. Estimating Individual Tree Leaf Area in Loblolly Pine Plantations Using LiDAR-Derived Measurements of Height and Crown Dimensions. For. Ecol. Manag. 2009, 213, 54–70. [Google Scholar] [CrossRef]
- García-Cimarras, A.; Manzanera, J.A.; Valbuena, R. Analysis of Mediterranean Vegetation Fuel Type Changes Using Multitemporal Lidar. Forests 2021, 12, 335. [Google Scholar] [CrossRef]
- Solano, F.; Praticò, S.; Piovesan, G.; Modica, G. Unmanned Aerial Vehicle (UAV) Derived Canopy Gaps in the Old-Growth Beech Forest of Mount Pollinello (Italy): Preliminary Results. In Computational Science and Its Applications—ICCSA 2021; Gervasi, O., Murgante, B., Misra, S., Garau, C., Blečić, I., Taniar, D., Apduhan, B.O., Rocha, A.M.A.C., Tarantino, E., Torre, C.M., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2021; Volume 12955, pp. 126–138. ISBN 978-3-030-87006-5. [Google Scholar]
- Anderson, R.S.; Bolstad, P.V. Estimating Aboveground Biomass and Average Annual Wood Biomass Increment with Airborne Leaf-on and Leaf-off Lidar in Great Lakes Forest Types. North. J. Appl. For. 2013, 30, 16–22. [Google Scholar] [CrossRef]
- Bottalico, F.; Chirici, G.; Giannini, R.; Mele, S.; Mura, M.; Puxeddu, M.; McRoberts, R.E.; Valbuena, R.; Travaglini, D. Modeling Mediterranean Forest Structure Using Airborne Laser Scanning Data. Int. J. Appl. Earth Obs. Geoinf. 2017, 57, 145–153. [Google Scholar] [CrossRef]
- Chirici, G.; McRoberts, R.E.; Fattorini, L.; Mura, M.; Marchetti, M. Comparing Echo-Based and Canopy Height Model-Based Metrics for Enhancing Estimation of Forest Aboveground Biomass in a Model-Assisted Framework. Remote Sens. Environ. 2016, 174, 1–9. [Google Scholar] [CrossRef]
- Corona, P.; Cartisano, R.; Salvati, R.; Chirici, G.; Floris, A.; di Martino, P.; Marchetti, M.; Scrinzi, G.; Clementel, F.; Travaglini, D.; et al. Airborne Laser Scanning to Support Forest Resource Management under Alpine, Temperate and Mediterranean Environments in Italy. Eur. J. Remote Sens. 2012, 45, 27–37. [Google Scholar] [CrossRef] [Green Version]
- Næsset, E. Predicting Forest Stand Characteristics with Airborne Scanning Laser Using a Practical Two-Stage Procedure and Field Data. Remote Sens. Environ. 2002, 80, 88–99. [Google Scholar] [CrossRef]
- Popescu, S.C. Estimating Biomass of Individual Pine Trees Using Airborne Lidar. Biomass Bioenergy 2007, 31, 646–655. [Google Scholar] [CrossRef]
- Ruiz, L.A.; Hermosilla, T.; Mauro, F.; Godino, M. Analysis of the Influence of Plot Size and LiDAR Density on Forest Structure Attribute Estimates. Forests 2014, 5, 936–951. [Google Scholar] [CrossRef] [Green Version]
- Holmgren, J.; Nilsson, M.; Olsson, H. Estimation of Tree Height and Stem Volume on Plots Using Airborne Laser Scanning. For. Sci. 2003, 49, 419–428. [Google Scholar] [CrossRef]
- McRoberts, R.E.; Tomppo, E.O.; Næsset, E. Advances and Emerging Issues in National Forest Inventories. Scand. J. For. Res. 2010, 25, 368–381. [Google Scholar] [CrossRef]
- Hyyppä, J.; Yu, X.; Hyyppä, H.; Vastaranta, M.; Holopainen, M.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Vaaja, M.; Koskinen, J.; et al. Advances in Forest Inventory Using Airborne Laser Scanning. Remote Sens. 2012, 4, 1190–1207. [Google Scholar] [CrossRef] [Green Version]
- Forestry Applications of Airborne Laser Scanning: Concepts and Case Studies; Maltamo, M.; Næsset, E.; Vauhkonen, J. (Eds.) Managing Forest Ecosystems; Springer: Dordrecht, The Netherlands, 2014; Volume 27, ISBN 978-94-017-8662-1. [Google Scholar]
- Latifi, H.; Fassnacht, F.E.; Müller, J.; Tharani, A.; Dech, S.; Heurich, M. Forest Inventories by LiDAR Data: A Comparison of Single Tree Segmentation and Metric-Based Methods for Inventories of a Heterogeneous Temperate Forest. Int. J. Appl. Earth Obs. Geoinf. 2015, 42, 162–174. [Google Scholar] [CrossRef]
- White, J.C.; Coops, N.C.; Wulder, M.A.; Vastaranta, M.; Hilker, T.; Tompalski, P. Remote Sensing Technologies for Enhancing Forest Inventories: A Review. Can. J. Remote Sens. 2016, 42, 619–641. [Google Scholar] [CrossRef] [Green Version]
- Means, J.E.; Acker, S.A.; Fitt, B.J.; Renslow, M.; Emerson, L.; Hendrix, C.J. Predicting Forest Stand Characteristics with Airborne Scanning Lidar. Photogramm. Eng. Remote Sens. 2000, 66, 1367–1371. [Google Scholar]
- Seidl, R.; Spies, T.A.; Rammer, W.; Steel, E.A.; Pabst, R.J.; Olsen, K. Multi-Scale Drivers of Spatial Variation in Old-Growth Forest Carbon Density Disentangled with Lidar and an Individual-Based Landscape Model. Ecosystems 2012, 15, 1321–1335. [Google Scholar] [CrossRef] [Green Version]
- Sverdrup-Thygeson, A.; Ørka, H.O.; Gobakken, T.; Næsset, E. Can Airborne Laser Scanning Assist in Mapping and Monitoring Natural Forests? For. Ecol. Manag. 2016, 369, 116–125. [Google Scholar] [CrossRef]
- White, J.C.; Tompalski, P.; Coops, N.C.; Wulder, M.A. Comparison of Airborne Laser Scanning and Digital Stereo Imagery for Characterizing Forest Canopy Gaps in Coastal Temperate Rainforests. Remote Sens. Environ. 2018, 208, 1–14. [Google Scholar] [CrossRef]
- Bauhus, J.; Puettmann, K.; Messier, C. Silviculture for Old-Growth Attributes. For. Ecol. Manag. 2009, 258, 525–537. [Google Scholar] [CrossRef] [Green Version]
- Burrascano, S.; Keeton, W.S.; Sabatini, F.M.; Blasi, C. Commonality and Variability in the Structural Attributes of Moist Temperate Old-Growth Forests: A Global Review. For. Ecol. Manag. 2013, 291, 458–479. [Google Scholar] [CrossRef]
- Lindenmayer, D.B.; Franklin, J.F. Conserving Forest Biodiversity: A Comprehensive Multiscaled Approach; Island Press: Washington, DC, USA, 2002; ISBN 978-1-55963-935-4. [Google Scholar]
- Shorohova, E.; Kneeshaw, D.; Kuuluvainen, T.; Gauthier, S. Variability and Dynamics of Old-Growth Forests in the Circumboreal Zone: Implications for Conservation, Restoration and Management. Silva. Fenn. 2011, 45, 785–806. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.; Kim, J.B.; Trugman, A.T.; Kim, Y.; Still, C.J. Linking Tree Physiological Constraints with Predictions of Carbon and Water Fluxes at an Old-Growth Coniferous Forest. Ecosphere 2019, 10, e02692:20. [Google Scholar] [CrossRef] [Green Version]
- McGarvey, J.C.; Thompson, J.R.; Epstein, H.E.; Shugart, H.H., Jr. Carbon Storage in Old-Growth Forests of the Mid-Atlantic: Toward Better Understanding the Eastern Forest Carbon Sink. Ecology 2015, 96, 311–317. [Google Scholar] [CrossRef]
- Corona, P.; Blasi, C.; Chirici, G.; Facioni, L.; Fattorini, L.; Ferrari, B. Monitoring and Assessing Old-Growth Forest Stands by Plot Sampling. Plant. Biosyst. 2010, 144, 171–179. [Google Scholar] [CrossRef] [Green Version]
- Motta, R.; Garbarino, M.; Berretti, R.; Bjelanovic, I.; Borgogno Mondino, E.; Čurović, M.; Keren, S.; Meloni, F.; Nosenzo, A. Structure, Spatio-Temporal Dynamics and Disturbance Regime of the Mixed Beech–Silver Fir–Norway Spruce Old-Growth Forest of Biogradska Gora (Montenegro). Plant. Biosyst.-An. Int. J. Deal. All Asp. Plant. Biol. 2015, 149, 966–975. [Google Scholar] [CrossRef]
- Paillet, Y.; Pernot, C.; Boulanger, V.; Debaive, N.; Fuhr, M.; Gilg, O.; Gosselin, F. Quantifying the Recovery of Old-Growth Attributes in Forest Reserves: A First Reference for France. For. Ecol. Manag. 2015, 346, 51–64. [Google Scholar] [CrossRef]
- Barabesi, L.; Fattorini, L. The Use of Replicated Plot, Line and Point Sampling for Estimating Species Abundance and Ecological Diversity. Environ. Ecol. Stat. 1998, 5, 353–370. [Google Scholar] [CrossRef]
- Alessandrini, A.; Biondi, F.; Di Filippo, A.; Ziaco, E.; Piovesan, G. Tree Size Distribution at Increasing Spatial Scales Converges to the Rotated Sigmoid Curve in Two Old-Growth Beech Stands of the Italian Apennines. For. Ecol. Manag. 2011, 262, 1950–1962. [Google Scholar] [CrossRef]
- Frazer, G.W.; Magnussen, S.; Wulder, M.A.; Niemann, K.O. Simulated Impact of Sample Plot Size and Co-Registration Error on the Accuracy and Uncertainty of LiDAR-Derived Estimates of Forest Stand Biomass. Remote Sens. Environ. 2011, 115, 636–649. [Google Scholar] [CrossRef]
- Lombardi, F.; Marchetti, M.; Corona, P.; Merlini, P.; Chirici, G.; Tognetti, R.; Burrascano, S.; Alivernini, A.; Puletti, N. Quantifying the Effect of Sampling Plot Size on the Estimation of Structural Indicators in Old-Growth Forest Stands. For. Ecol. Manag. 2015, 346, 89–97. [Google Scholar] [CrossRef] [Green Version]
- McRoberts, R.E.; Winter, S.; Chirici, G.; LaPoint, E. Assessing Forest Naturalness. For. Sci. 2012, 58, 294–309. [Google Scholar] [CrossRef]
- Gobakken, T.; Næsset, E. Assessing Effects of Positioning Errors and Sample Plot Size on Biophysical Stand Properties Derived from Airborne Laser Scanner Data. Can. J. For. Res. 2009, 39, 1036–1052. [Google Scholar] [CrossRef]
- Zhao, K.; Popescu, S.; Nelson, R. Lidar Remote Sensing of Forest Biomass: A Scale-Invariant Estimation Approach Using Airborne Lasers. Remote Sens. Environ. 2009, 113, 182–196. [Google Scholar] [CrossRef]
- Calamini, G.; Maltoni, A.; Travaglini, D.; Iovino, F.; Nicolaci, A.; Menguzzato, G.; Corona, P.; Ferrari, B.; Santo, D.D.; Chirici, G.; et al. Caratteri Strutturali Di Potenziali Foreste Vetuste Appenniniche: Risultati Preliminari. L’Italia For. E Mont. 2011, 66, 365–381. [Google Scholar] [CrossRef] [Green Version]
- Motta, R.; Garbarino, M.; Berretti, R.; Meloni, F.; Nosenzo, A.; Vacchiano, G. Development of Old-Growth Characteristics in Uneven-Aged Forests of the Italian Alps. Eur. J. For. Res. 2015, 134, 19–31. [Google Scholar] [CrossRef] [Green Version]
- Nagel, T.A.; Svoboda, M. Gap Disturbance Regime in an Old-Growth Fagus–Abies Forest in the Dinaric Mountains, Bosnia-Herzegovina. Can. J. For. Res. 2008, 38, 2728–2737. [Google Scholar] [CrossRef] [Green Version]
- Badalamenti, E.; La Mantia, T.; La Mantia, G.; Cairone, A.; La Mela Veca, D.S. Living and Dead Aboveground Biomass in Mediterranean Forests: Evidence of Old-Growth Traits in a Quercus Pubescens Willd. s.l. Stand. Forests 2017, 8, 187. [Google Scholar] [CrossRef] [Green Version]
- Rivas-Martínez, S.; Penas, A.; Díaz, T. Biogeographic Map of Europe; Cartographic service: Léon, Spain, 2004. [Google Scholar]
- Food and Agriculture Organization World Reference Base for Soil Resources 2014: International Soil Classification System for Naming Soils and Creating Legends for Soil Maps; FAO: Rome, Italy, 2014; ISBN 978-92-5-108369-7.
- Kattenborn, T.; Sperlich, M.; Bataua, K.; Koch, B. Automatic Single Palm Tree Detection in Plantations Using UAV-Based Photogrammetric Point Clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, XL–3, 139–144. [Google Scholar] [CrossRef] [Green Version]
- Balsi, M.; Esposito, S.; Fallavollita, P.; Nardinocchi, C. Single-Tree Detection in High-Density LiDAR Data from UAV-Based Survey. Eur. J. Remote Sens. 2018, 51, 679–692. [Google Scholar] [CrossRef] [Green Version]
- Andritsanos, V.D.; Arabatzi, O.; Gianniou, M.; Pagounis, V.; Tziavos, I.N.; Vergos, G.S.; Zacharis, E. Comparison of Various GPS Processing Solutions toward an Efficient Validation of the Hellenic Vertical Network: The ELEVATION Project. J. Surv. Eng. 2016, 142, 04015007:13. [Google Scholar] [CrossRef]
- Mageed, K.M.A. Comparison of GPS Commercial Software Packages to Processing Static Baselines up to 30 Km. ARPN J. Eng. Appl. Sci. 2015, 10, 10640–10650. [Google Scholar]
- Dardanelli, G.; Paliaga, S.; Allegra, M.; Carella, M.; Giammarresi, V. Geomatic Applications Tourban Park in Palermo. Geogr. Tech. 2015, 10, 28–43. [Google Scholar]
- Goad, C.C. A Modified Hopfield Tropospheric Refraction Correction Model. Paper presented at the Fall Annual Meeting American Geophysical Union, San Francisco, CA, USA, 12–17 December 1974. [Google Scholar]
- Hopfield, H.S. Two-Quartic Tropospheric Refractivity Profile for Correcting Satellite Data. J. Geophys. Res. 1969, 74, 4487–4499. [Google Scholar] [CrossRef]
- Niell, A.E. Global Mapping Functions for the Atmosphere Delay at Radio Wavelengths. J. Geophys. Res. B Solid Earth 1996, 101, 3227–3246. [Google Scholar] [CrossRef]
- Coulson, D.M.; Roth, K.C. Gemini North r’ Band Imaging of the Keck II Laser. In Proceedings of the SPIE Proceedings; Ellerbroek, B.L., Hart, M., Hubin, N., Wizinowich, P.L., Eds.; International Society for Optics and Photonics: San Diego, CA, USA, 2010; Volume 7736, p. 9. [Google Scholar]
- Trimble GNSS Planning. Available online: https://www.gnssplanning.com/#/settings (accessed on 21 February 2022).
- Sferlazza, S.; Maetzke, F.; Iovino, M.; Baiamonte, G.; Palmeri, V.; La Mela Veca, D.S. Effects of Traditional Forest Management on Carbon Storage in a Mediterranean Holm Oak (Quercus Ilex L.) Coppice. Iforest-Biogeosci. For. 2018, 11, 344–351. [Google Scholar] [CrossRef] [Green Version]
- Ward, J.; Anagnostakis, S.; Ferrandino, F. Stand Dynamics in Connecticut Hardwood Forests: The Old Series Plots (1927–1997); Connecticut Agricultural Experiment Station: New Haven, CT, USA, 1999. [Google Scholar]
- Tabacchi, G.; Di Cosmo, L.; Gasparini, P. Aboveground Tree Volume and Phytomass Prediction Equations for Forest Species in Italy. Eur. J. Forest Res. 2011, 130, 911–934. [Google Scholar] [CrossRef]
- Meyer, T.; Bean, J.; Ferguson, C.; Naismith, J. The Effect of Broadleaf Canopies on Survey-Grade Horizontal GPS/GLONASS Measurements; Department of Natural Resources and the Environment Articles; UCONN: Storrs, CT, USA, 2002. [Google Scholar]
- Lachapelle, G. Pedestrian Navigation with High Sensitivity GPS Receivers and MEMS. Pers. Ubiquitous Comput. 2007, 11, 481–488. [Google Scholar] [CrossRef]
- Fauzi, M.F.; Idris, N.H.; Yahya, M.H.; Din, A.H.M.; Idris, N.H.; Lau, A.M.S.; Ishak, M.H.L. Tropical Forest Tree Positioning Accuracy: A Comparison of Low Cost GNSS-Enabled Devices. Int. J. Geoinform. 2016, 12, 59–66. [Google Scholar]
- Tomaštík, J.; Varga, M. Practical Applicability of Processing Static, Short-Observation-Time Raw GNSS Measurements Provided by a Smartphone under Tree Vegetation. Measurement 2021, 178, 109397. [Google Scholar] [CrossRef]
- Fan, Y.; Feng, Z.; Mannan, A.; Khan, T.U.; Shen, C.; Saeed, S. Estimating Tree Position, Diameter at Breast Height, and Tree Height in Real-Time Using a Mobile Phone with RGB-D SLAM. Remote Sens. 2018, 10, 1845. [Google Scholar] [CrossRef] [Green Version]
- Kaartinen, H.; Hyyppä, J.; Vastaranta, M.; Kukko, A.; Jaakkola, A.; Yu, X.; Pyörälä, J.; Liang, X.; Liu, J.; Wang, Y.; et al. Accuracy of Kinematic Positioning Using Global Satellite Navigation Systems under Forest Canopies. Forests 2015, 6, 3218–3236. [Google Scholar] [CrossRef]
- Næsset, E.; Gjevestad, J.G. Performance of GPS Precise Point Positioning Under Conifer Forest Canopies. Photogramm Eng Remote Sens. 2008, 74, 661–668. [Google Scholar] [CrossRef]
- Valbuena, R.; Mauro, F.; Rodriguez-Solano, R.; Manzanera, J.A. Accuracy and Precision of GPS Receivers under Forest Canopies in a Mountainous Environment. Span. J. Agric. Res. 2010, 8, 1047. [Google Scholar] [CrossRef]
- Dardanelli, G.; Lo Brutto, M.; Pipitone, C. GNSS CORS Network of the University of Palermo: Design and First Analysis of Data. Geog. Techn. 2020, 15, 43–69. [Google Scholar] [CrossRef]
- Kenyeres, A.; Bellet, J.G.; Bruyninx, C.; Caporali, A.; de Doncker, F.; Droscak, B.; Duret, A.; Franke, P.; Georgiev, I.; Bingley, R.; et al. Regional Integration of Long-Term National Dense GNSS Network Solutions. GPS Solut 2019, 23, 122. [Google Scholar] [CrossRef] [Green Version]
- Dardanelli, G.; Maltese, A.; Pipitone, C.; Pisciotta, A.; Lo Brutto, M. Nrtk, Ppp or Static, That Is the Question. Testing Different Positioning Solutions for Gnss Survey. Remote Sens. 2021, 13, 1406. [Google Scholar] [CrossRef]
- Mikulski, J. Modern Transport. Telematics: 11th International Conference on Transport. Systems Telematics, TST 2011, Katowice-Ustron, Poland, October 19–22, 2011, Selected Papers; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011; ISBN 978-3-642-24659-3. [Google Scholar]
- Kissam, P. Surveying for Civil. Engineers; McGraw-Hill: New York, NY, USA, 1981; ISBN 978-0-07-034882-0. [Google Scholar]
- Kraus, K.; Pfeifer, N. Determination of Terrain Models in Wooded Areas with Airborne Laser Scanner Data. ISPRS J. Photogramm. Remote Sens. 1998, 53, 193–203. [Google Scholar] [CrossRef]
- Biondi, F.; Myers, D.E.; Avery, C.C. Geostatistically Modeling Stem Size and Increment in an Old-Growth Forest. Can. J. For. Res. 1994, 24, 1354–1368. [Google Scholar] [CrossRef]
- Kuuluvainen, T.; Penttinen, A.; Leinonen, K.; Nygren, M. Statistical Opportunities for Comparing Stand Structural Heterogeneity in Managed and Primeval Forests: An Example from Boreal Spruce Forest in Southern Finland. Silva. Fennica 1996, 30, 315–328. [Google Scholar] [CrossRef] [Green Version]
- Kuuluvainen, T.; Järvinen, E.; Hokkanen, T.J.; Rouvinen, S.; Heikkinen, K. Structural Heterogeneity and Spatial Autocorrelation in a Natural Mature Pinus Sylvestris Dominated Forest. Ecography 1998, 21, 159–174. [Google Scholar] [CrossRef]
- Rozas, V.; Zas, R.; Solla, A. Spatial Structure of Deciduous Forest Stands with Contrasting Human Influence in Northwest Spain. Eur. J. Forest Res. 2009, 128, 273–285. [Google Scholar] [CrossRef] [Green Version]
- Song, C. Estimating Tree Crown Size with Spatial Information of High Resolution Optical Remotely Sensed Imagery. Int. J. Remote Sens. 2007, 28, 3305–3322. [Google Scholar] [CrossRef]
- Dardanelli, G. Valutazione dell’apporto della costellazione GLONASS nel posizionamento NRTK con ricevitori GNSS geodetici. GEOmedia 2011, 15, 40–46. [Google Scholar]
- Lu, Y.-H.; Han, J.-Y. Gnss Satellite Visibility Analysis Based on 3d Spatial Information in Urban Areas. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2020, XLIII-B4-2020, 123–128. [Google Scholar] [CrossRef]
- Evans, J.D. Straightforward Statistics for the Behavioral Sciences; Brooks/Cole Pub. Co.: Pacific Grove, CA, USA, 1996; ISBN 978-0-534-23100-2. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nugget Effect | Quadratic | Nugget Effect | Quadratic | ||||
|---|---|---|---|---|---|---|---|
| Error | 0.61 | Scale | 10.85 | Error | 0.78 | Scale | 23 |
| Variance | Length | 20 | Variance | Length | 20.31 | ||
| Linear | Anis. ratio | 1.66 | Linear | Anis. ratio | 1.86 | ||
| Slope | 0.32 | Anis. angle | 90 | Slope | 0.15 | Anis. angle | 111 |
| Anis. ratio | 1.40 | Anis. ratio | 2 | ||||
| Anis. angle | 145.2 | Anis. angle | 106.3 | ||||
| (a) | (b) | ||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sferlazza, S.; Maltese, A.; Dardanelli, G.; La Mela Veca, D.S. Optimizing the Sampling Area across an Old-Growth Forest via UAV-Borne Laser Scanning, GNSS, and Radial Surveying. ISPRS Int. J. Geo-Inf. 2022, 11, 168. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi11030168
Sferlazza S, Maltese A, Dardanelli G, La Mela Veca DS. Optimizing the Sampling Area across an Old-Growth Forest via UAV-Borne Laser Scanning, GNSS, and Radial Surveying. ISPRS International Journal of Geo-Information. 2022; 11(3):168. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi11030168
Chicago/Turabian StyleSferlazza, Sebastiano, Antonino Maltese, Gino Dardanelli, and Donato Salvatore La Mela Veca. 2022. "Optimizing the Sampling Area across an Old-Growth Forest via UAV-Borne Laser Scanning, GNSS, and Radial Surveying" ISPRS International Journal of Geo-Information 11, no. 3: 168. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi11030168