Panoramic Mapping with Information Technologies for Supporting Engineering Education: A Preliminary Exploration

Abstract
:1. Introduction
2. Related Works
2.1. Panorama
2.2. Virtual Reality (VR)
2.3. Education with Information Technologies
2.4. Summary
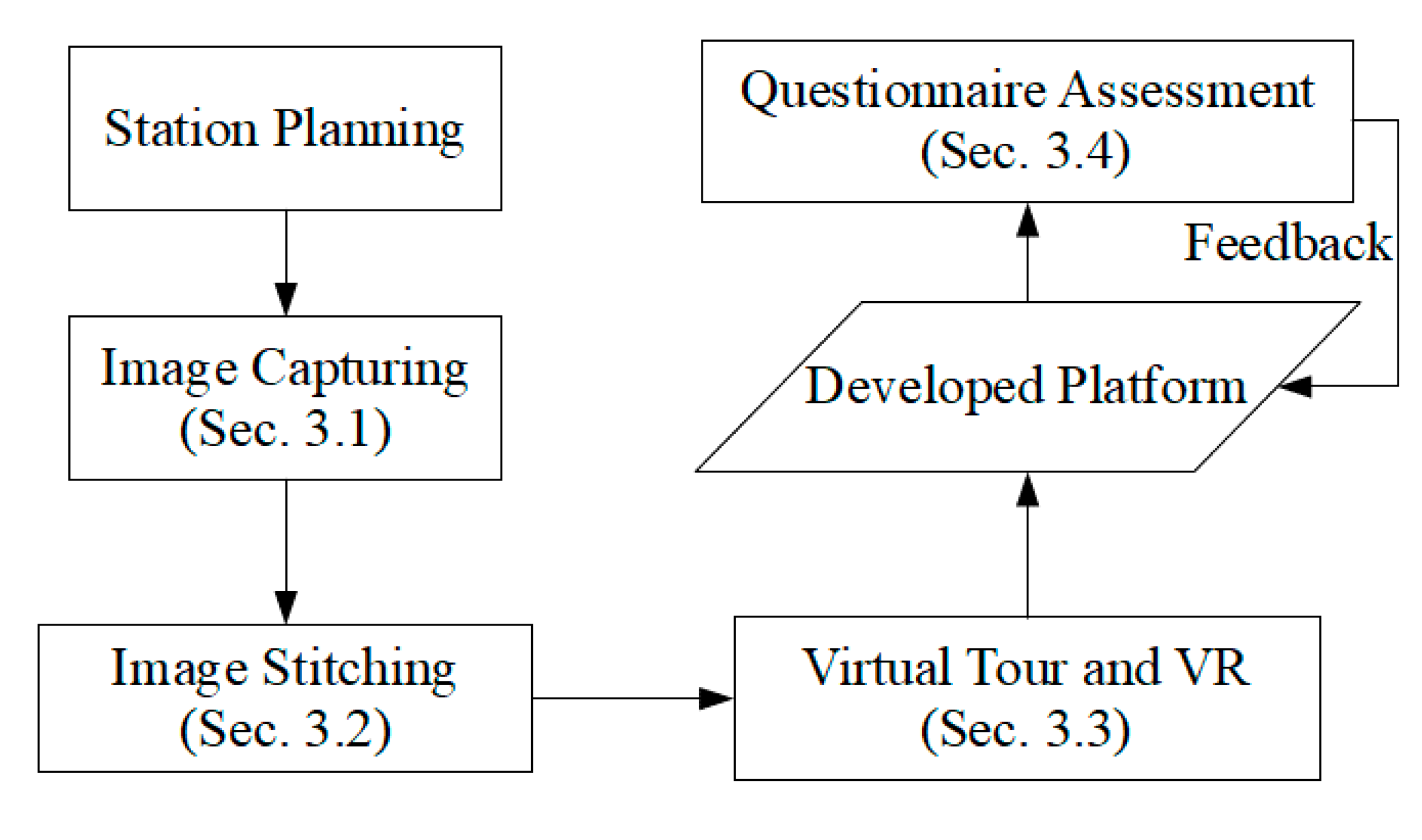
3. Materials and Methods
3.1. Image Capturing
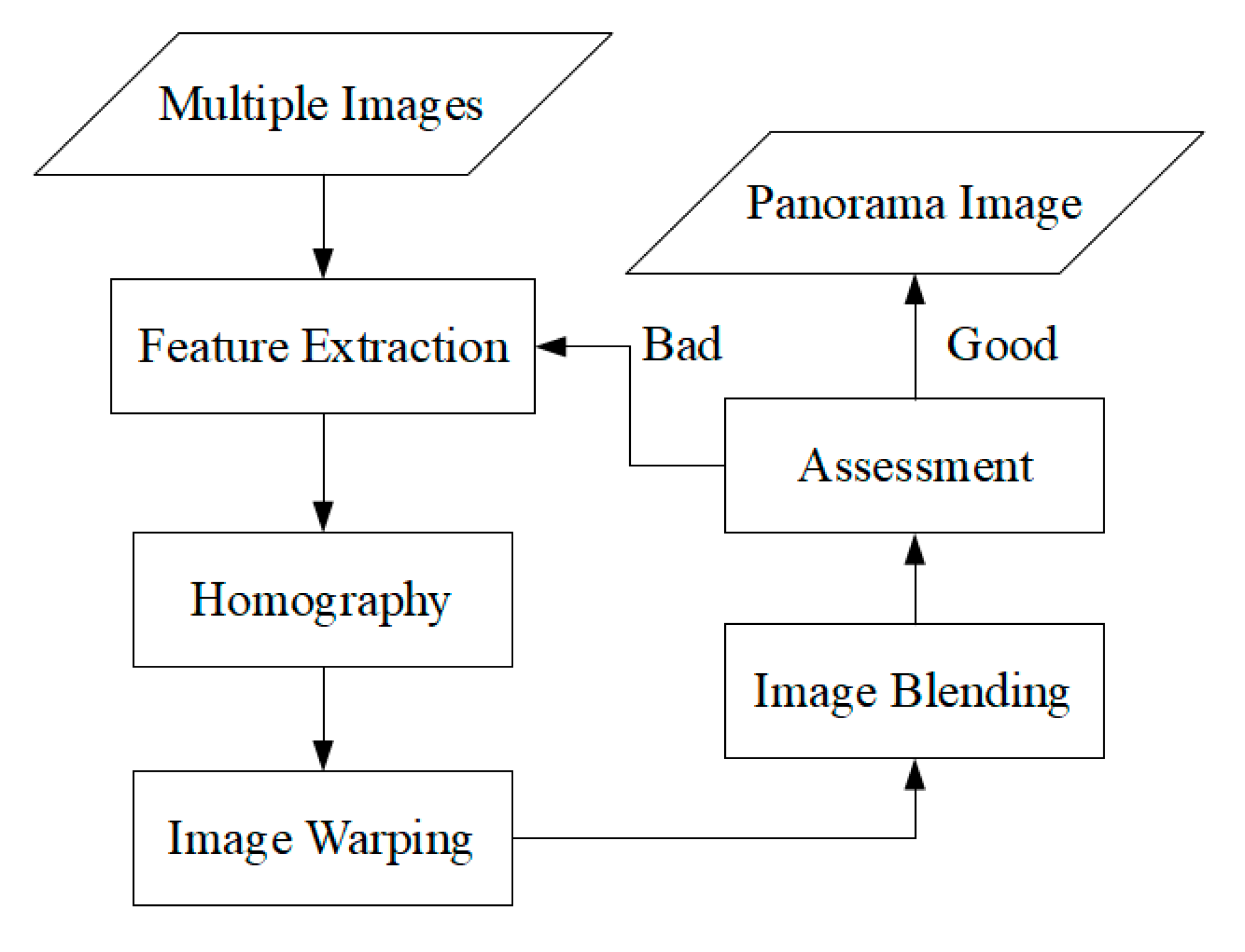
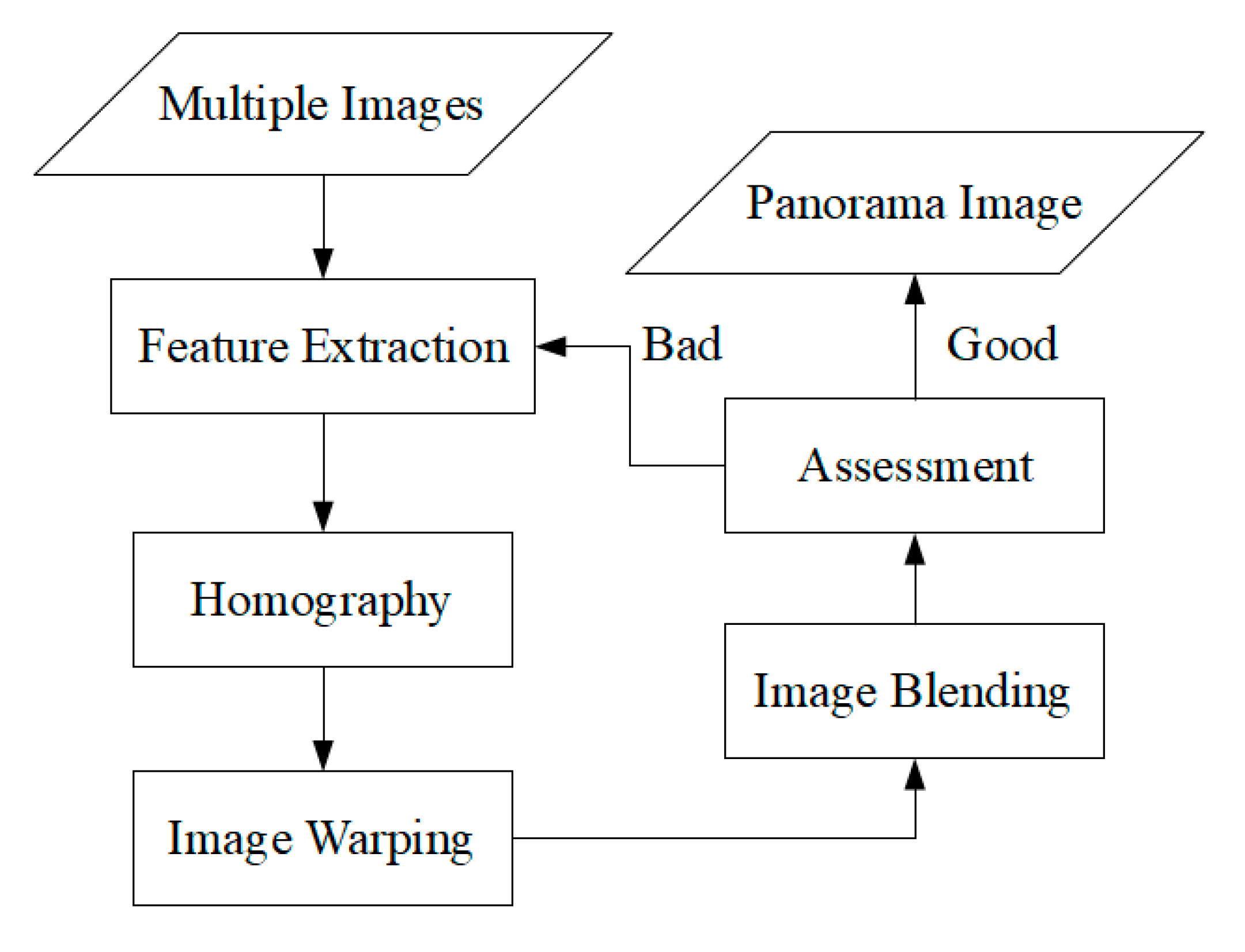
3.2. Image Stitching
3.2.1. Homography
3.2.2. Image Warping and Blending
3.2.3. Accuracy Assessment
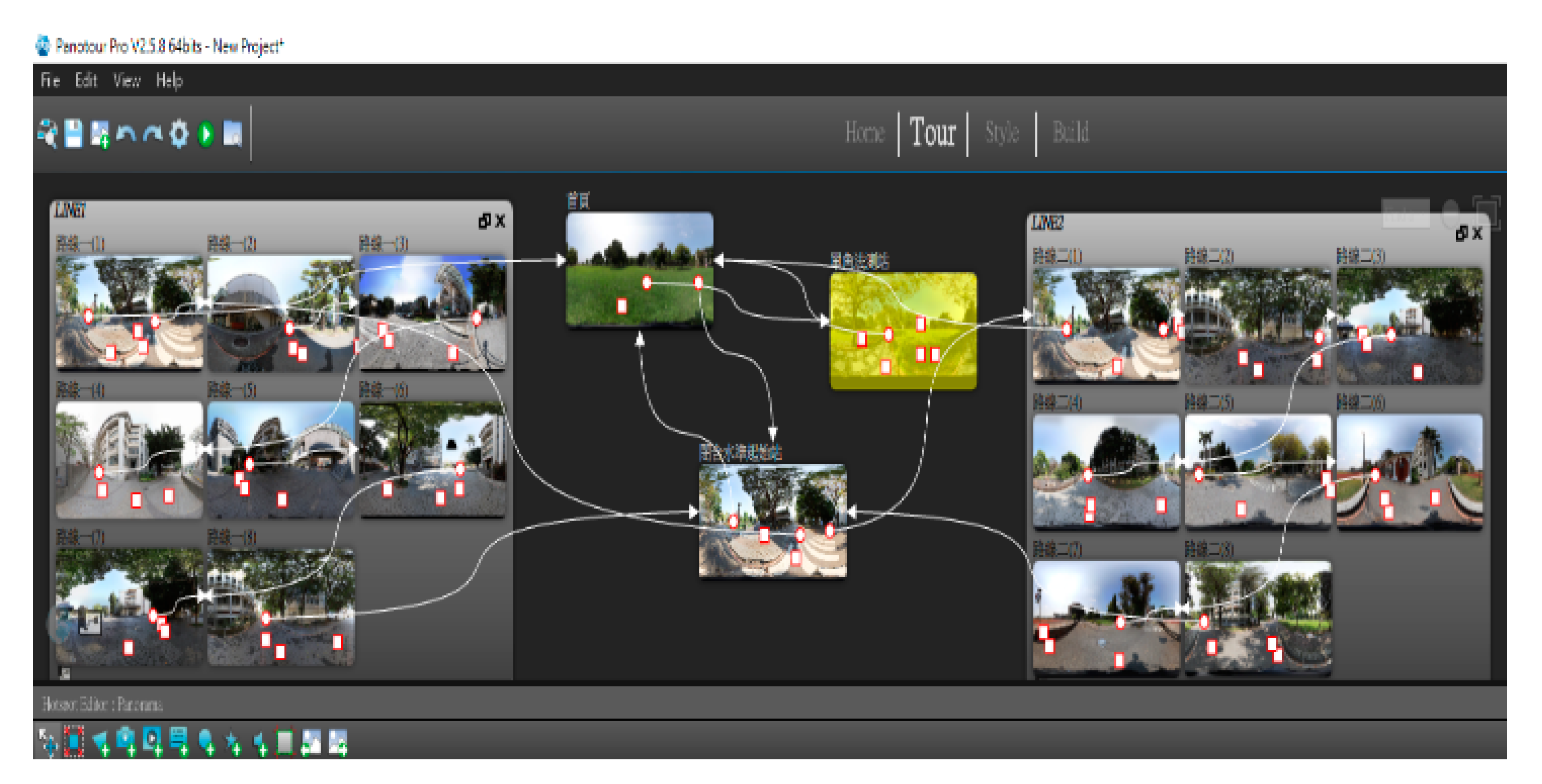
3.3. Virtual Tour with VR
3.4. Designed Questionnaire
- Q1.
- After using the virtual tour webpages, compared with the scenario where only an introduction is provided by the instructor, can you more easily identify surveying targets on campus?
- Q2.
- Are you satisfied with the overall webpage design?
- Q3.
- Are you interested in research on surveying practice courses that employ panorama and VR technology?
- Q4.
- Do you like courses that incorporate information technologies (e.g., e-learning)?
4. Results
4.1. Camera Settings
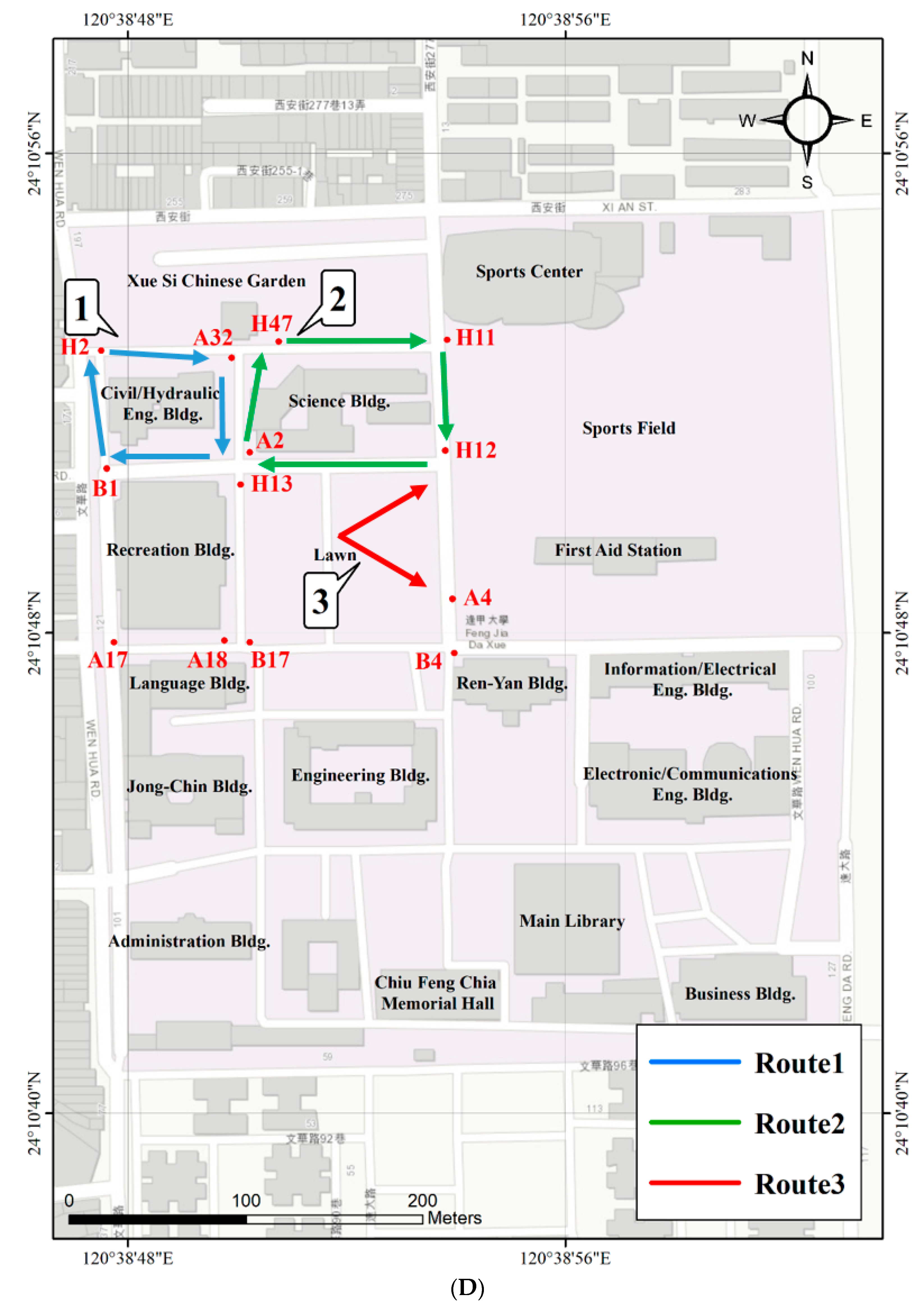
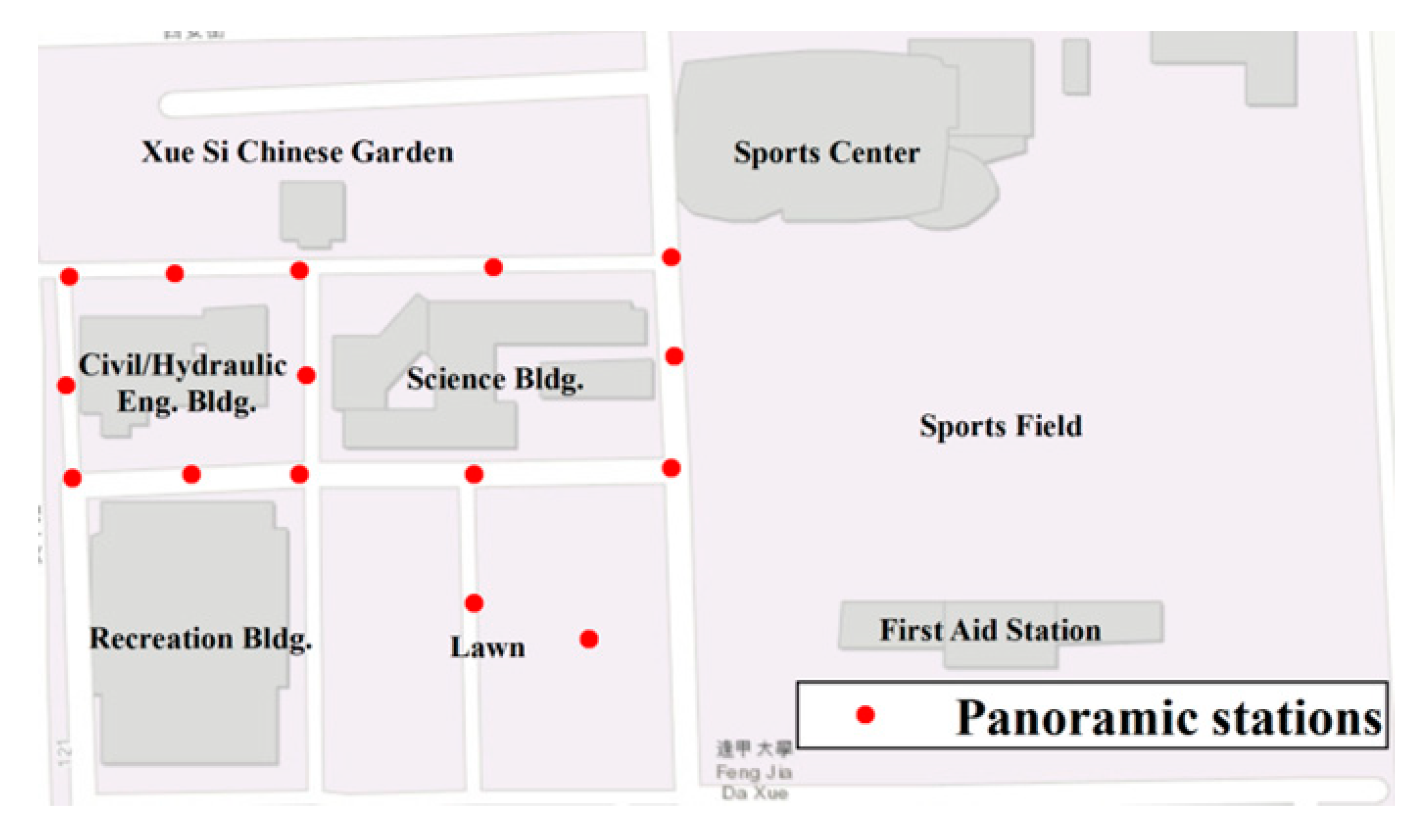
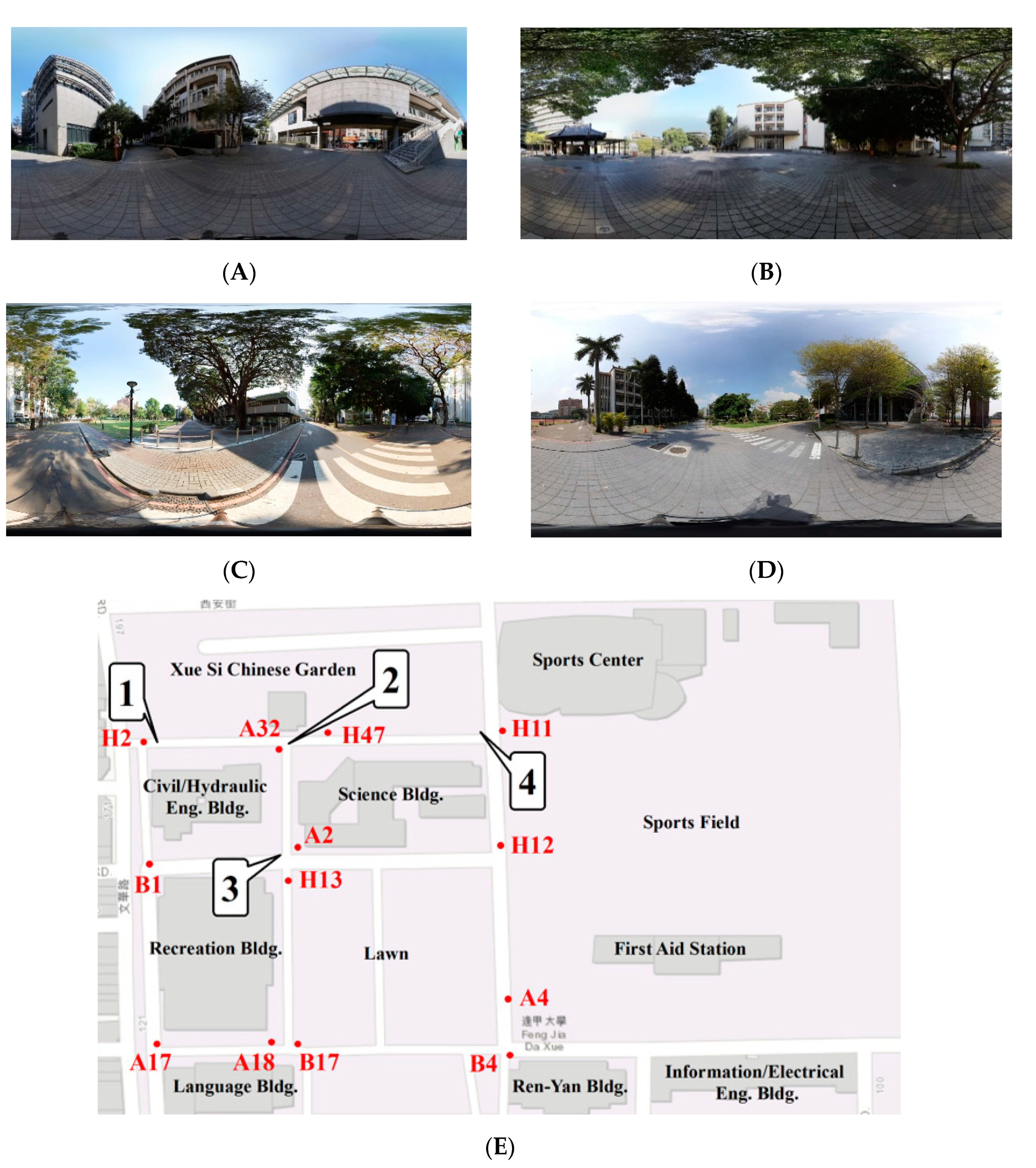
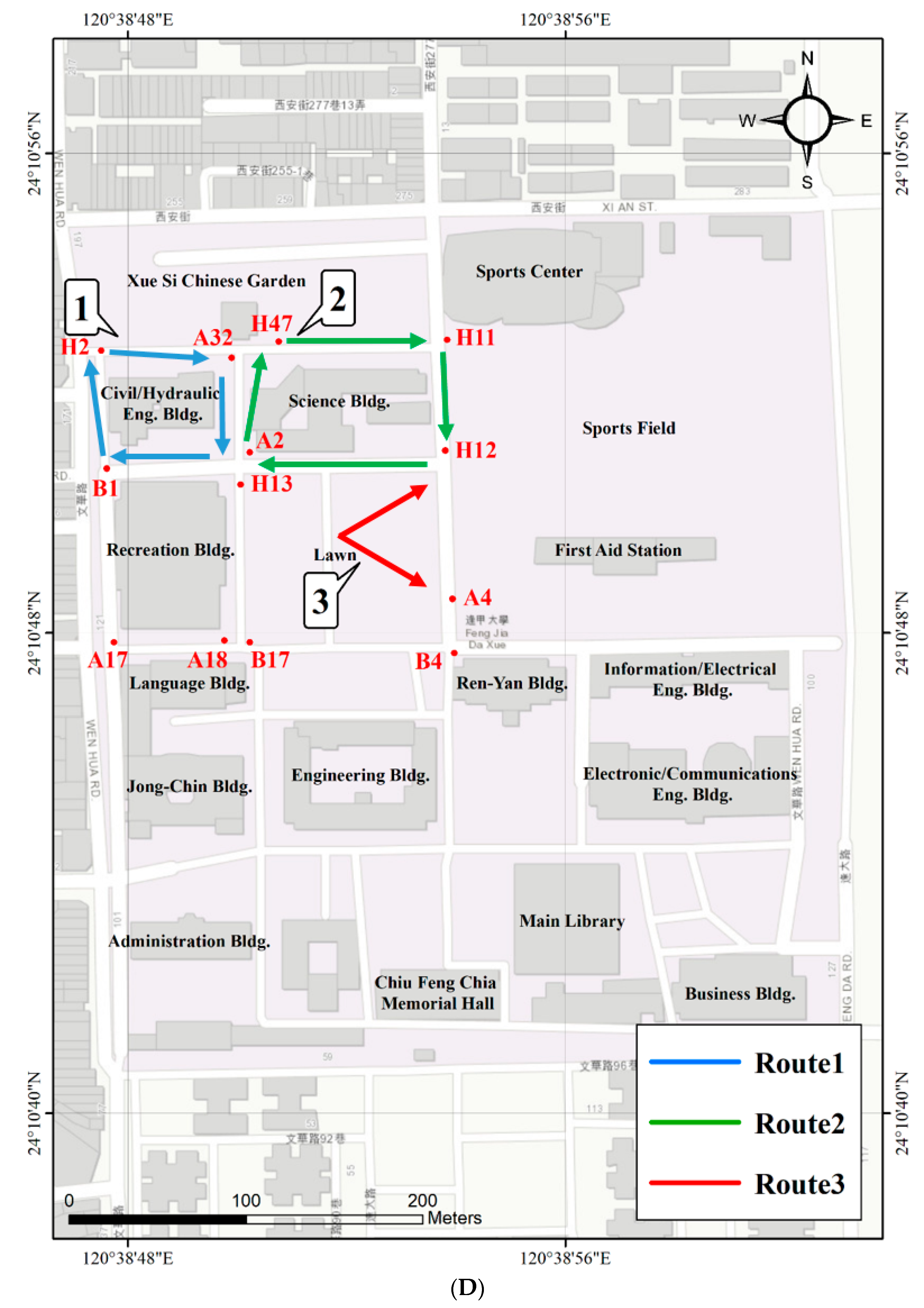
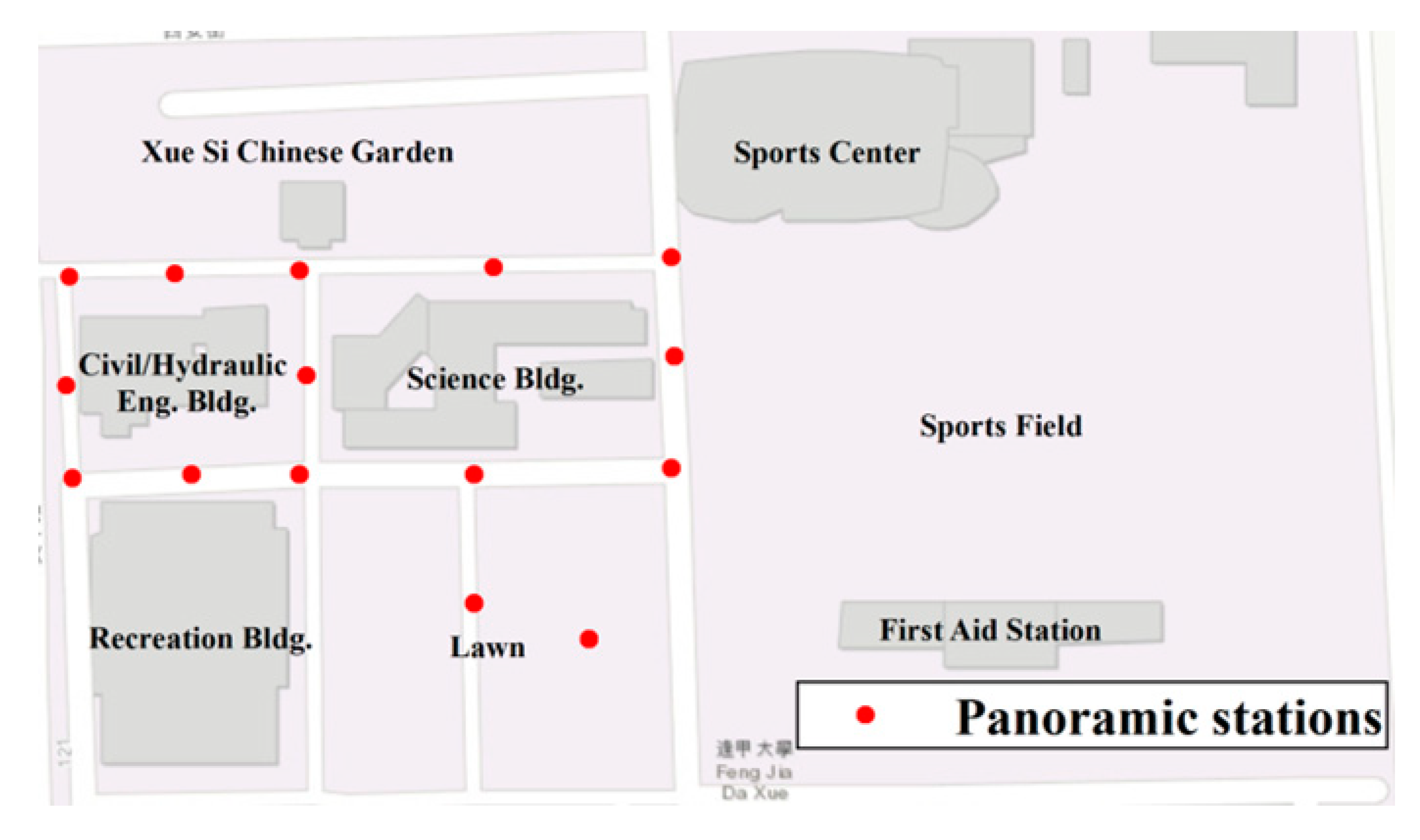
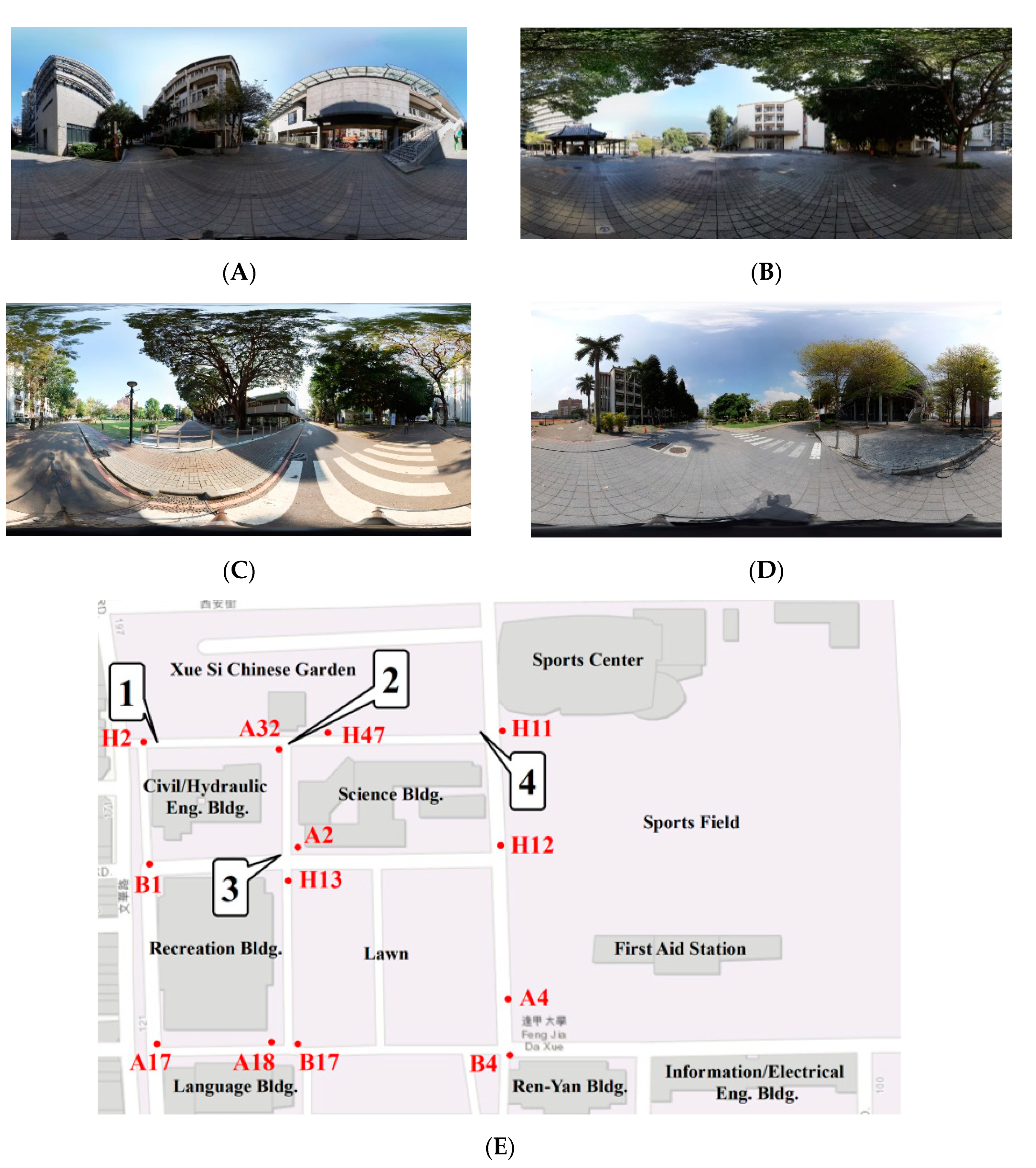
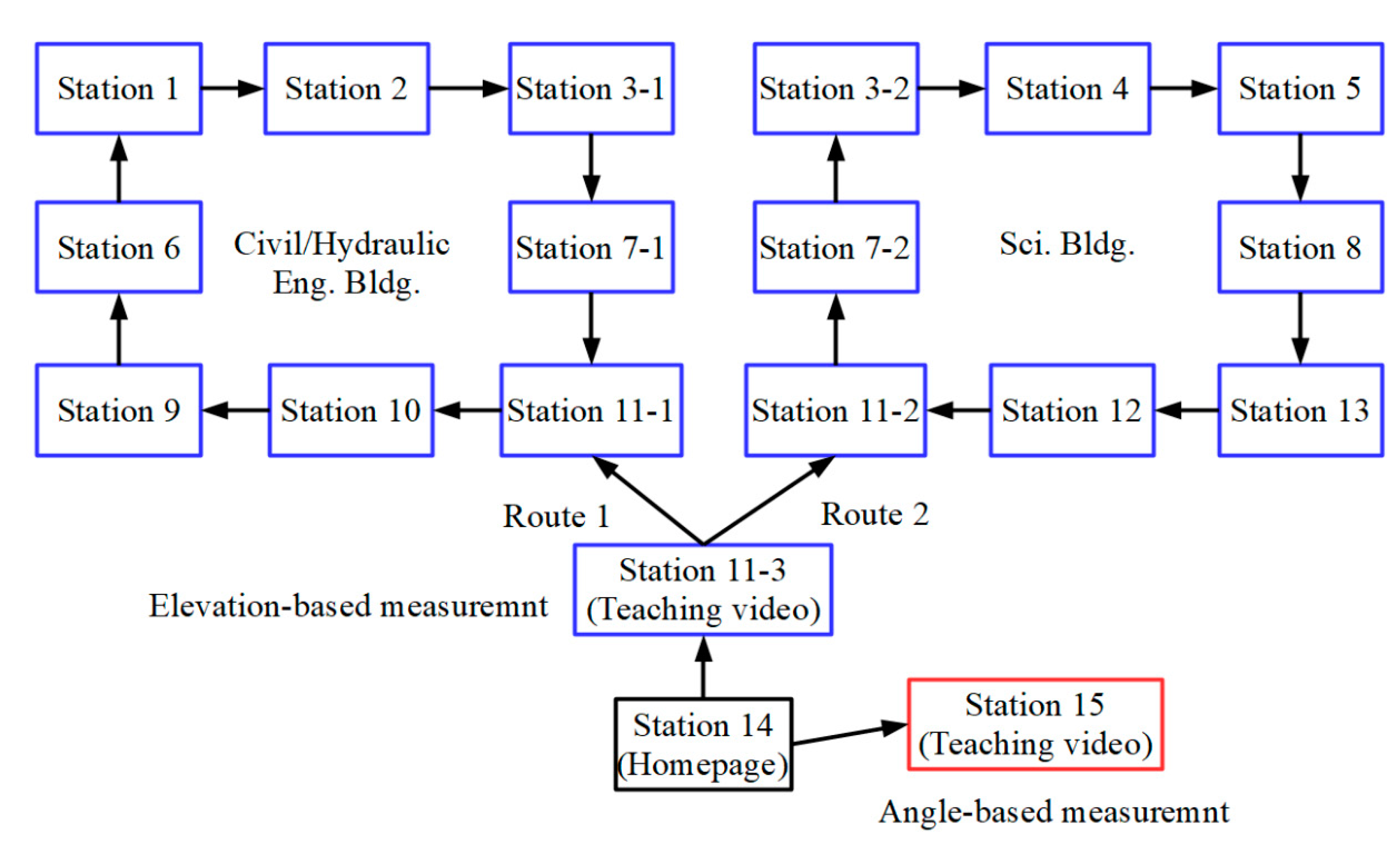
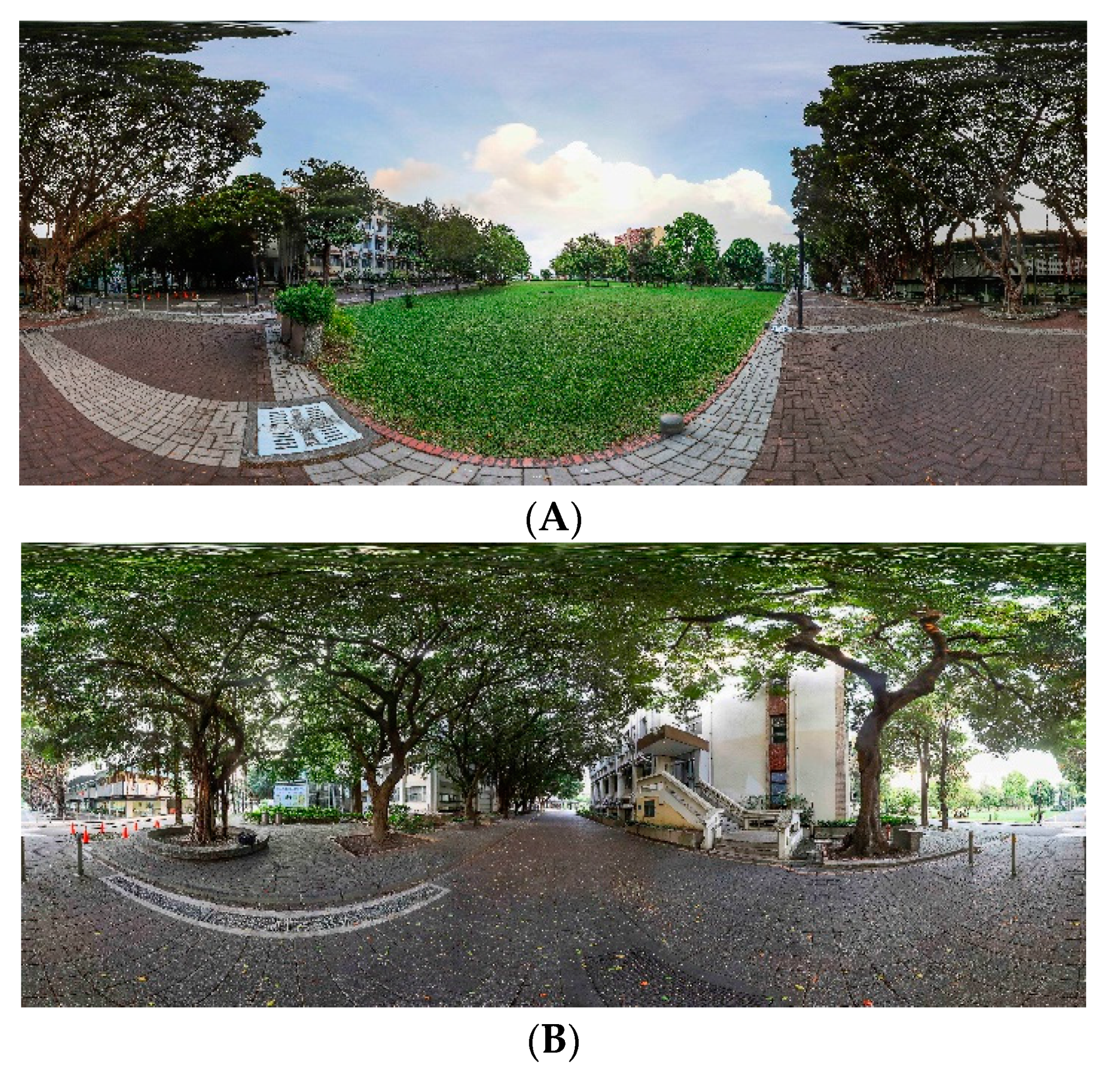
4.2. Study Site and Routes
4.3. Developed Platform
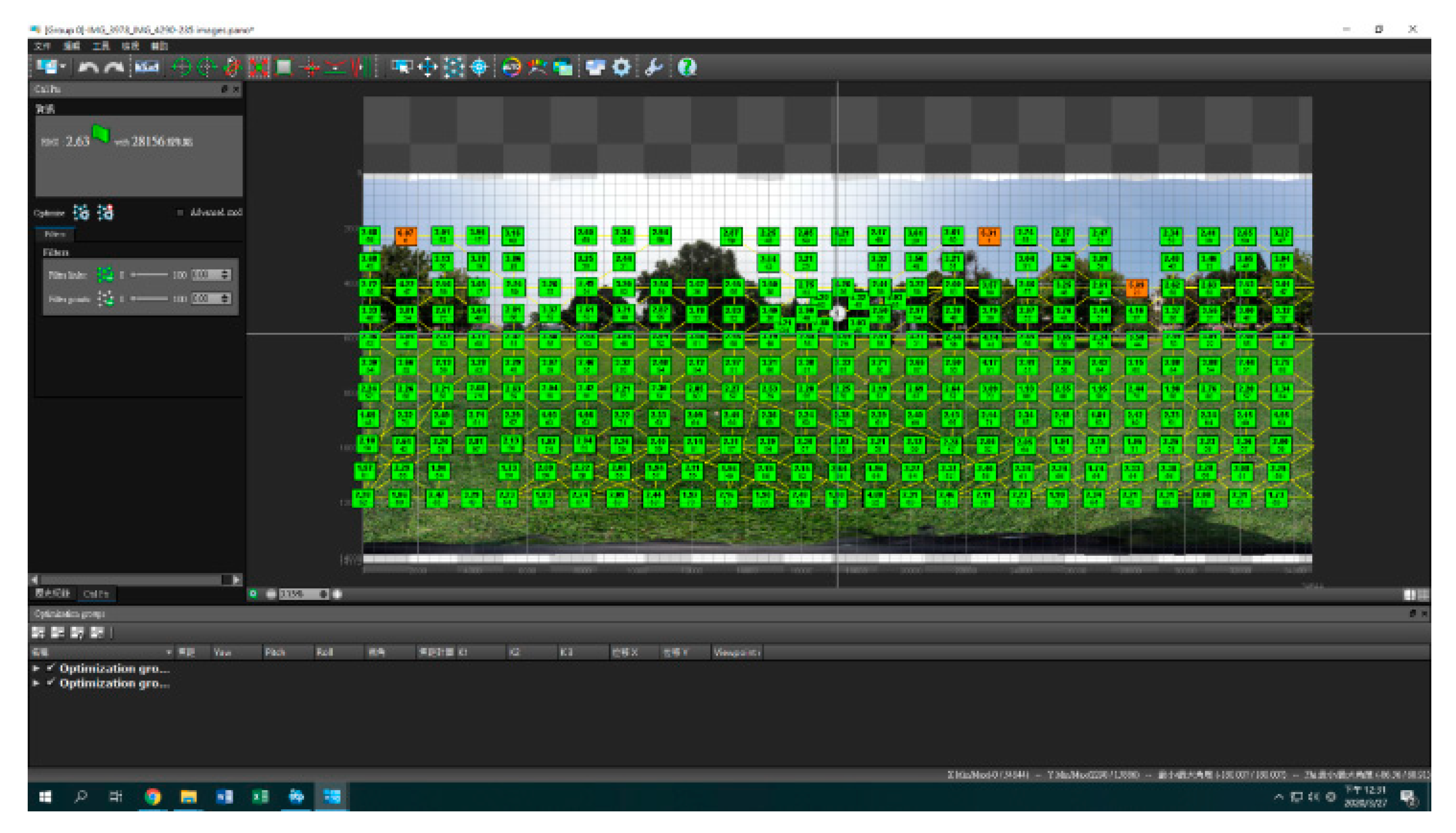
4.3.1. Image Stitching
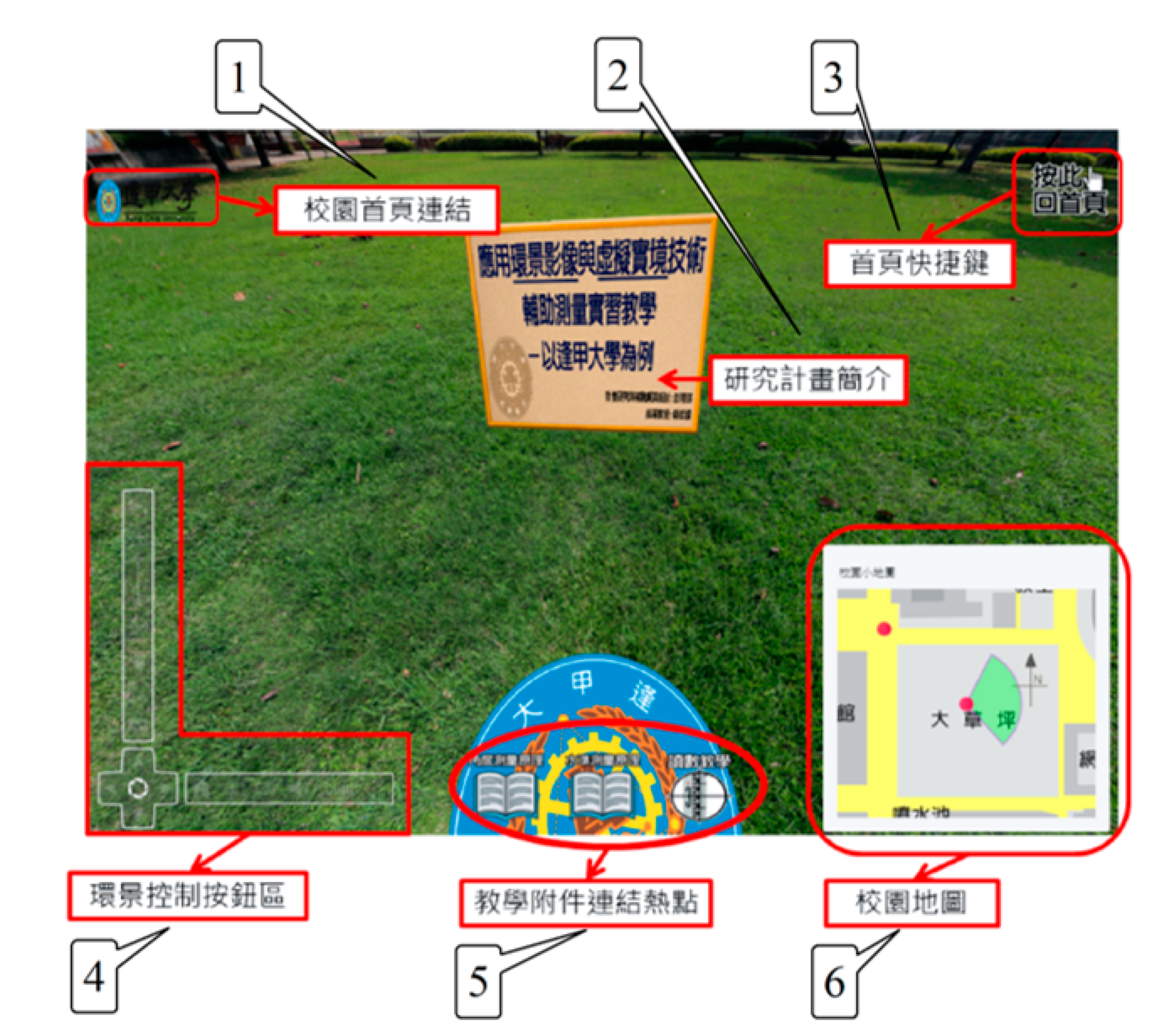
4.3.2. Webpage and Virtual Tour
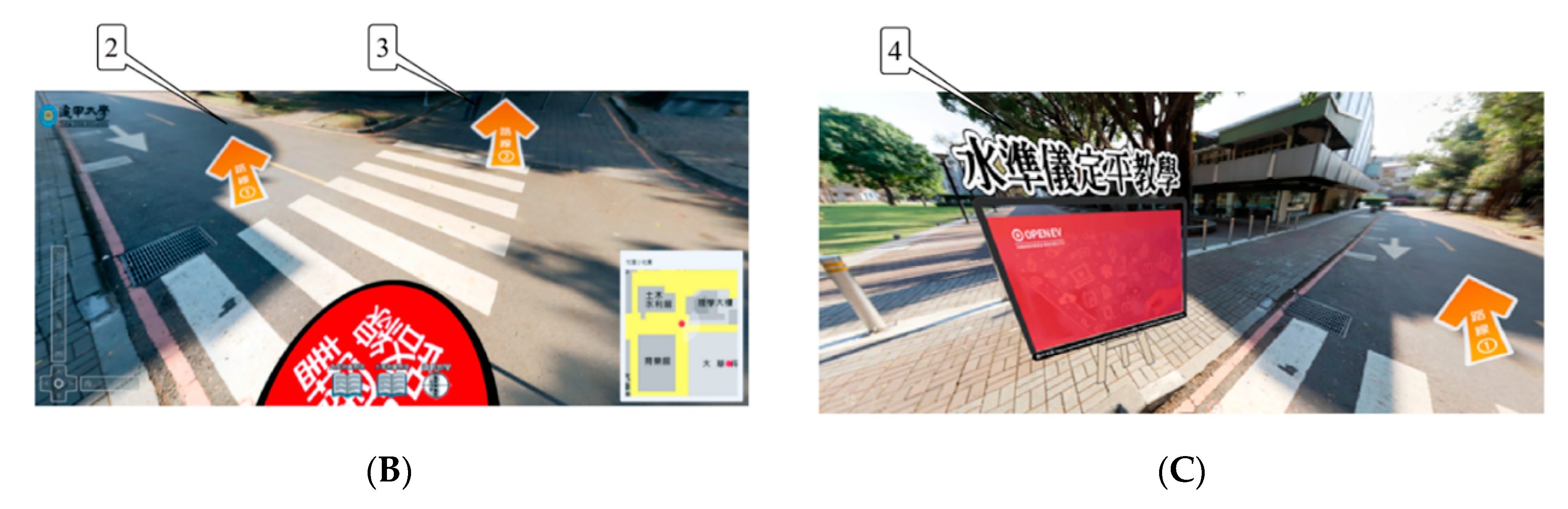
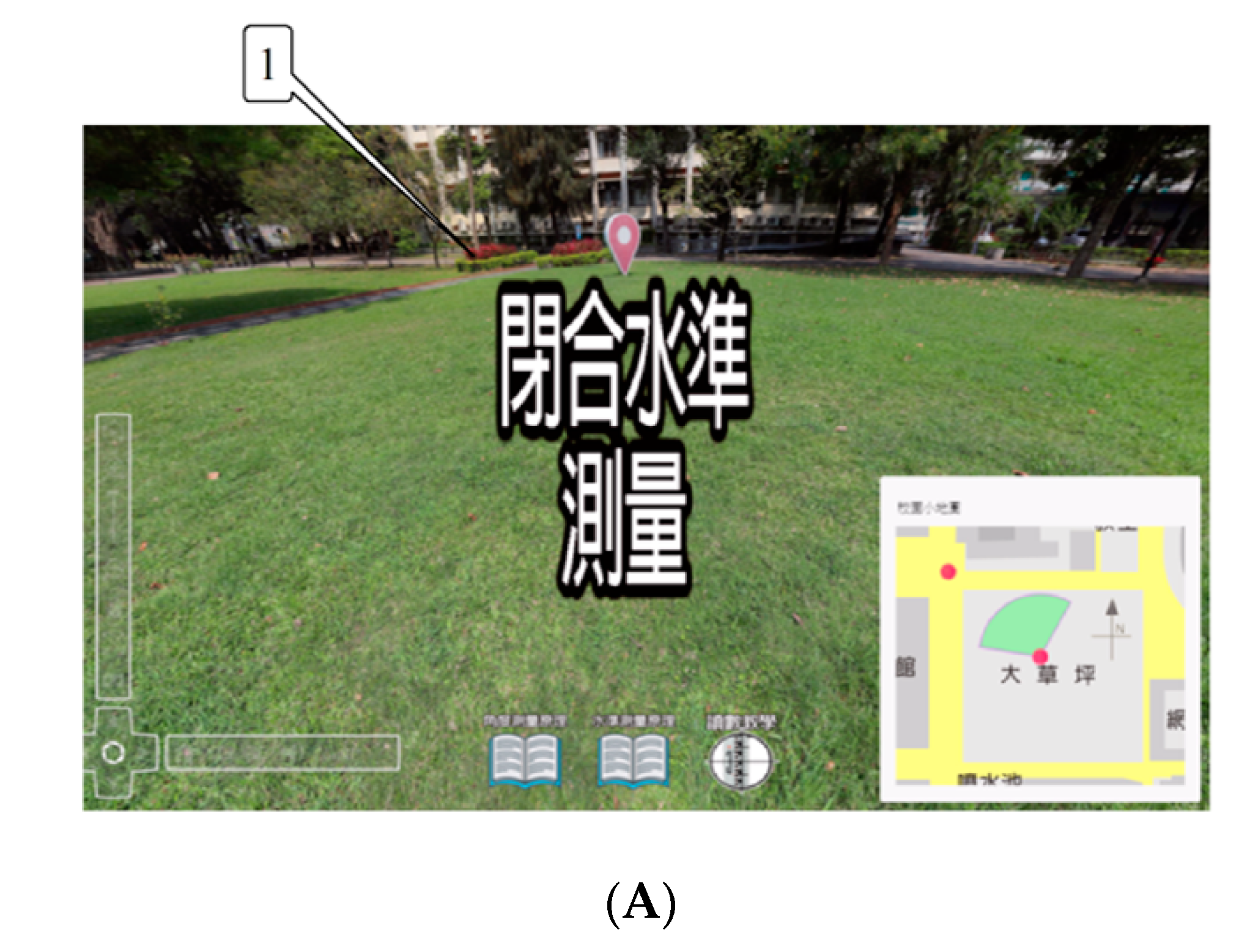
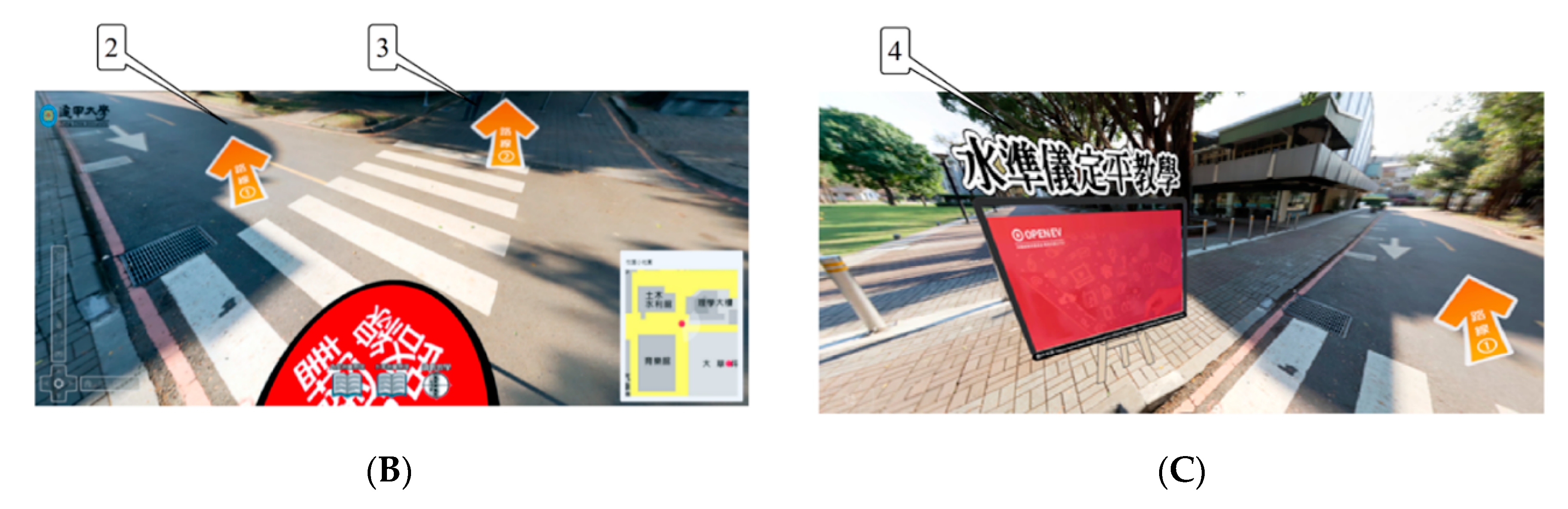
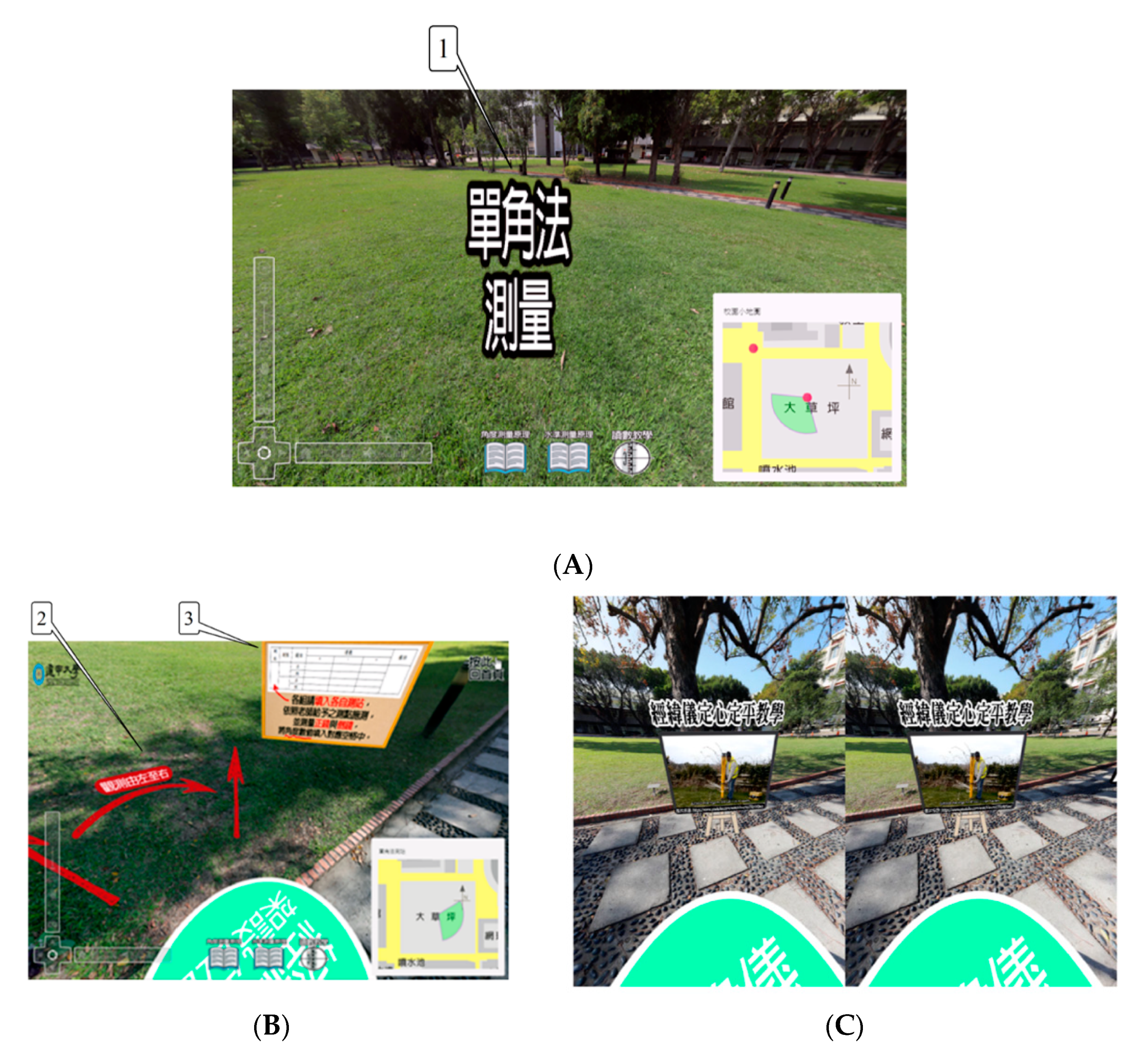
4.3.3. Demonstration
4.4. Questionnaire-Based Results
5. Discussion
5.1. Capturing Modes
5.2. Contributions, Comparison and Limitations
- Sampling design for statistical tests:
- -
- Testing differences of final grades between student groups with the IT (Information Technologies)-based method and without the IT-based method.
- -
- Grouping samples by the background of sampled students.
- Asking more aspects for comprehensive assessment:
- -
- “Would you recommend this to your friends and colleagues?” followed by “What points do you recommend/not recommend?”
- -
- “How long did you take to complete the IT-based program?”
- -
- “Does the virtual tour seamlessly/comfortably guide you?”
- -
- “Does the virtual tour sufficiently represent the real world?”
- Comparing and exploring the problems on IT-based and traditional learning.
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- AIR-360. Available online: https://www.youtube.com/watch?v=W3OWKEtVtUY (accessed on 30 September 2020).
- Super 720. Available online: https://super720.com/?page_id=8603 (accessed on 30 September 2020).
- Lorek, D.; Horbinski, T. Interactive web-map of the European freeway junction A1/A4 development with the use of archival cartographic source. ISPRS Int. J. GeoInf. 2020, 9, 438. [Google Scholar] [CrossRef]
- Cybulski, P.; Horbinski, T. User experience in using graphical user interfaces of web maps. ISPRS Int. J. GeoInf. 2020, 9, 412. [Google Scholar] [CrossRef]
- Kato, Y.; Yamamoto, K. A sightseeing spot recommendation system that takes into account the visiting frequency of users. ISPRS Int. J. GeoInf. 2020, 9, 411. [Google Scholar] [CrossRef]
- Wielebski, L.; Medynska-Gulij, B.; Halik, L.; Dickmann, F. Time, spatial, and descriptive features of pedestrian tracks on set of visualizations. ISPRS Int. J. GeoInf. 2020, 9, 348. [Google Scholar] [CrossRef]
- Medynska-Gulij, B.; Wielebski, L.; Halik, L.; Smaczynski, M. Complexity level of people gathering presentation on an animated map–objective effectiveness versus expert opinion. ISPRS Int. J. GeoInf. 2020, 9, 117. [Google Scholar] [CrossRef] [Green Version]
- Lu, C.-C. A Study on Computer-Aided Instruction for Engineering Surveying Practice. Master’s Thesis, National Taiwan University, Taipei, Taiwan, 2009. [Google Scholar]
- Panos. Available online: http://www.panosensing.com.tw/2018/03/28/faq6/ (accessed on 30 September 2020).
- Zheng, J.; Zhang, Z.; Tao, Q.; Shen, K.; Wang, Y. An accurate multi-row panorama generation using multi-point joint stitching. IEEE Access 2018, 6, 27827–27839. [Google Scholar] [CrossRef]
- Chen, P.-Y.; Tseng, Y.-T. Automatic conjugate point searching of spherical panorama images. J. Photogram. Remote Sens. 2019, 24, 147–159. [Google Scholar]
- Teo, T.-A.; Chang, C.-Y. The Generation of 3D point clouds from spherical and cylindrical panorama images. J. Photogram. Remote Sens. 2018, 23, 273–284. [Google Scholar]
- Laliberte, A.S.; Winters, C.; Rango, A. A Procedure for orthrectification of sub-decimeter resolution image obtained with an unmanned aerial vehicle (UAV). In Proceedings of the ASPRS Annual Conference, Portland, OR, USA, 28 April–2 May 2008. [Google Scholar]
- Wrozynski, R.; Pyszny, K.; Sojka, M. Quantitative landscape assessment using LiDAR and rendered 360° panoramic images. Remote Sens. 2020, 12, 386. [Google Scholar] [CrossRef] [Green Version]
- Huang, T.C.; Tseng, Y.-H. Indoor Positioning and navigation based on control spherical panoramic images. J. Photogram. Remote Sens. 2017, 22, 105–115. [Google Scholar]
- Koehl, M.; Brigand, N. Combination of virtual tours, 3D model and digital data in a 3D archaeological knowledge and information system. In Proceedings of the XXII ISPRS Congress, Melbourne, Australia, 25 August–1 September 2012. [Google Scholar]
- Lee, I.-C.; Tsai, F. Applications of panoramic images: From 720° panorama to interior 3D models of augmented reality. In Proceedings of the Indoor-Outdoor Seamless Modelling, Mapping and Navigation, Tokyo, Japan, 21–22 May 2015. [Google Scholar]
- Quesada, E.; Harman, J. A Step Further in rock art digital enhancement. DStretch on Gigapixel imaging. Digit. Appl. Archaeol. Cult. Heritage 2019, 13, e00098. [Google Scholar] [CrossRef]
- Bakre, N.; Deshmukh, A.; Sapaliga, P.; Doulatramani, Y. Campus virtual tour. IJARCET 2017, 6, 444–448. [Google Scholar]
- Dennis, J.R.; Kansky, R.J. Electronic slices of reality: The instructional role of computerized simulations. In Instructional Computing: An Acting Guide for Educators; Foresman: Glenview, IL, USA, 1984; 256p. [Google Scholar]
- Burdea, G. Virtual reality systems and applications. In Electro/93 International Conference Record; Edison: Middlesex, NJ, USA, 1993; 504p. [Google Scholar]
- Gupta, R.; Lam, B.; Hong, J.-Y.; Ong, Z.-T.; Gan, W.-S.; Chong, S.H.; Feng, J. 3D audio VR/AR capture and reproduction setup for Auralization of soundscapes. In Proceedings of the 24th International Congress on Sound and Vibration, London, UK, 23–27 July 2017. [Google Scholar]
- Shambour, Q.; Fraihat, S.; Hourani, M. The implementation of mobile technologies in high education: A mobile application for university course advising. J. Internet Technol. 2018, 19, 1327–1337. [Google Scholar]
- Wu, Z.-H.; Zhu, Z.-T.; Chang, M. Issues of designing educational multimedia metadata set based on educational features and needs. J. Internet Technol. 2011, 12, 685–698. [Google Scholar]
- Hsieh, M.-C.; Chen, S.-H. Intelligence augmented reality tutoring system for Mathematics teaching and learning. J. Internet Technol. 2019, 20, 1673–1681. [Google Scholar]
- Lin, C.-L.; Chiang, J.K. Using 6E model in STEAM teaching activities to improve university students’ learning satisfaction: A case of development seniors IoT smart cane creative design. J. Internet Technol. 2019, 20, 2109–2116. [Google Scholar]
- Lee, J. Effectiveness of computer-based instruction simulation: A meta-analysis. Int. J. Instruct. Media 1999, 26, 71–85. [Google Scholar]
- Brenton, H.; Hernandez, J.; Bello, F.; Strutton, P.; Purkayastha, S.; Firth, T.; Darzi, A. Using multimedia and web3D to enhance anatomyteaching. Comput. Educ. 2007, 49, 32–53. [Google Scholar] [CrossRef]
- Vlahakis, V.; Ioannidis, N.; Karigiannis, J.; Tsotros, M.; Gounaris, M.; Stricker, D.; Gleue, T.; Daehne, P.; Almeida, L. Archeoguide: An augmented reality guide for archaeological sites. IEEE Comput. Graph. Appl. 2002, 22, 52–60. [Google Scholar] [CrossRef]
- ART EMPEROR. Available online: https://www.eettaiwan.com/news/article/20161226NT22-MIC-Top-10-technology-trends-for-2017 (accessed on 30 September 2020).
- Chao, T.-F. The Study of Virtual Reality Application in Education Learning—An Example on VR Scientific Experiment. Master’s Thesis, National Kaohsiung First University of Science and Technology, Kaohsiung, Taiwan, 2009. [Google Scholar]
- Chang, S.-Y. Research on the Effects of English Teaching with 3D Panoramic Computer Skill Application. Master’s Thesis, National University of Tainan, Tainan, Taiwan, 2018. [Google Scholar]
- Liao, Y.-C. Research on Using Virtual Reality to Enhance Vocational Students’ Learning Performance and Motivation. Master’s Thesis, National Taiwan University of Science and Technology, Taipei, Taiwan, 2019. [Google Scholar]
- Lowe, D.G. Object recognition from local scale-invariant features. In Proceedings of the 7th IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999. [Google Scholar]
- Wang, G.; Wu, Q.M.J.; Zhang, W. Kruppa equation based camera calibration from homography induced by remote plane. Pattern Recogn. Lett. 2008, 29, 2137–2144. [Google Scholar] [CrossRef]
- Sakharkar, V.S.; Gupta, S.R. Image stitching techniques—An overview. Int. J. Comput. Sci. Appl. 2013, 6, 324–330. [Google Scholar]
- Zeng, B.; Huang, Q.; Saddik, A.E.; Li, H.; Jiang, S.; Fan, X. Advances in multimedia information processing. In Proceedings of the 19th Pacific-Rim Conference on Multimedia, Hefei, China, 21–22 September 2018. [Google Scholar]
- Busch, D.D. Mastering Digital SLR Photography; Course Technology: Boston, MA, USA, 2005; 254p. [Google Scholar]
- Wang, Y.-C.; Shyu, M.J. A study of brightness correction method for different exposure in rebuilding scene luminance. J. CAGST 2015, 271–284. [Google Scholar]
- Li, D.; Xiao, B.J.; Xia, J.Y. High-resolution full frame photography of EAST to realize immersive panorama display. Fusion Eng. Des. 2020, 155, 111545. [Google Scholar] [CrossRef]
- Ekpar, F.E. A framework for interactive virtual tours. EJECE 2019, 3. [Google Scholar] [CrossRef] [Green Version]
- Perdana, D.; Irawan, A.I.; Munadi, R. Implementation of web based campus virtual tour for introducing Telkom University building. IJJSSST 2019, 20, 1–6. [Google Scholar] [CrossRef]
- Suwarno, N.P.M. Virtual campus tour (student perception of university virtual environment). J. Crit. Rev. 2020, 7, 4964–4969. [Google Scholar]
- Walmsley, A.P.; Kersten, T.P. The imperial cathedral in Konigslutter (Germany) as an immersive experience in virtual reality with integrated 360° panoramic photography. Appl. Sci. 2020, 10, 1517. [Google Scholar] [CrossRef] [Green Version]
- Mah, O.B.P.; Yan, Y.; Tan, J.S.Y.; Tan, Y.-X.; Tay, G.Q.Y.; Chiam, D.J.; Wang, Y.-C.; Dean, K.; Feng, C.-C. Generating a virtual tour for the preservation of the (in)tangible cultural heritage of Tampines Chinese Temple in Singapore. J. Cult. Herit. 2019, 39, 202–211. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field of Capturing | Panorama | 360° Panorama | Spherical Panorama |
|---|---|---|---|
| Horizontal | <180° | 360° | 360° |
| Vertical | <180° | <180° | 180° |
| Shutter Speed (Sec.) | Aperture Size | ISO Value |
|---|---|---|
| 1/500~1 | F/11~F/16 | 100~400 |
| (%) | Score | ||||
|---|---|---|---|---|---|
| 5 | 4 | 3 | 2 | 1 | |
| Q1 | 53 | 44 | 3 | - | - |
| Q2 | 48 | 44 | 8 | - | - |
| Q3 | 37 | 60 | 3 | - | - |
| Q4 | 45 | 55 | - | - | - |
| Overlap | Capturing Time (Min) | RMSE (Pixel) | |
|---|---|---|---|
| Case 1 | Case 2 | ||
| 30% | ~3 | 3.39 | 3.48 |
| 50% | ~5 | 3.37 | 3.39 |
| 70% | ~9 | 3.35 | 3.29 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lai, J.-S.; Peng, Y.-C.; Chang, M.-J.; Huang, J.-Y. Panoramic Mapping with Information Technologies for Supporting Engineering Education: A Preliminary Exploration. ISPRS Int. J. Geo-Inf. 2020, 9, 689. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi9110689
Lai J-S, Peng Y-C, Chang M-J, Huang J-Y. Panoramic Mapping with Information Technologies for Supporting Engineering Education: A Preliminary Exploration. ISPRS International Journal of Geo-Information. 2020; 9(11):689. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi9110689
Chicago/Turabian StyleLai, Jhe-Syuan, Yu-Chi Peng, Min-Jhen Chang, and Jun-Yi Huang. 2020. "Panoramic Mapping with Information Technologies for Supporting Engineering Education: A Preliminary Exploration" ISPRS International Journal of Geo-Information 9, no. 11: 689. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi9110689