
A Neuro-Predictive Controller Scheme for Integration of a Basic Wind Energy Generation Unit with an Electrical Power System




Abstract
:1. Introduction
1.1. Literature Review
1.2. Research Gap and Motivation
- (1)
- Most of the previous studies only concerned optimal control strategies or, only conventional controllers or an intelligent control (e.g., PID and MPC controllers). However, a few recent studies applied the advanced MPC controller.
- (2)
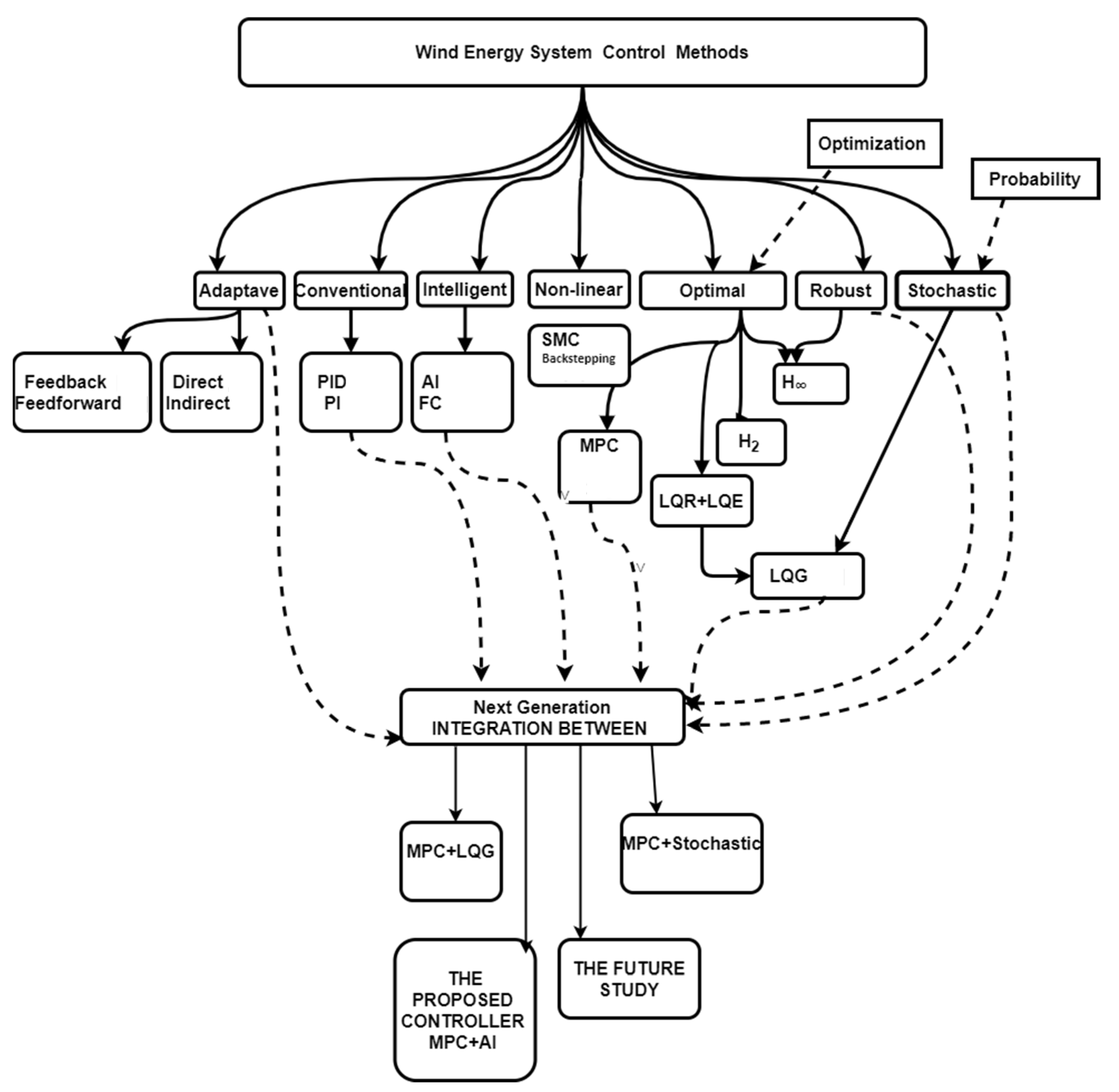
- Advanced MPC strategies are used for MPC combined with heuristic, meta-heuristic, or hierarchical algorithms. There is a good deal of possible integration between two or more approaches as shown in Figure 2. That might produce the next generation of controls to overcome the limitations of the previous control methods. Therefore, this study applies hybrid MPC with an artificial neural network to improve performance and smooth tracking.
- (3)
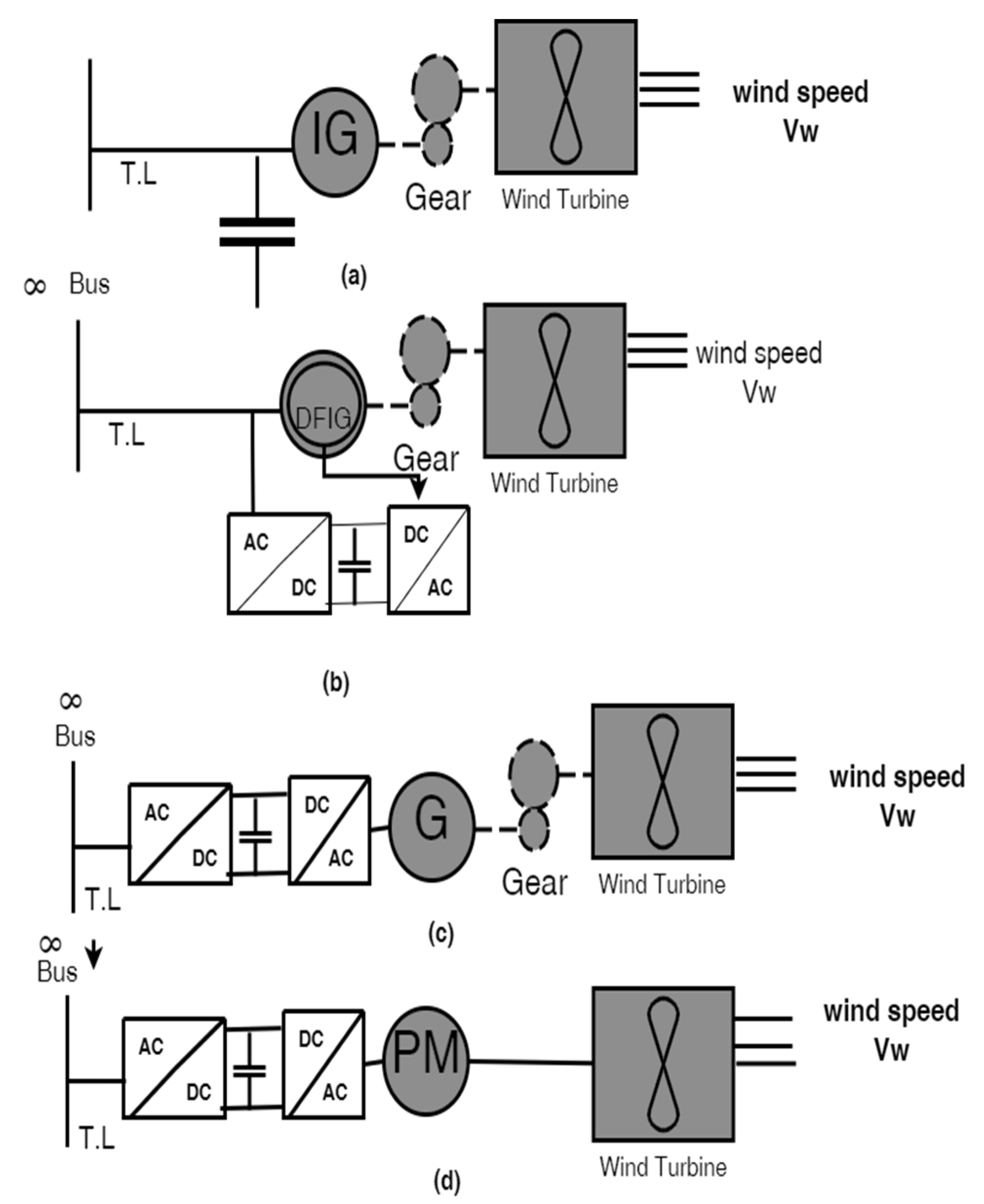
- Most of the techniques in previous works were often based on simplified models of the generator and the power electronics dynamics; their impact on the mechanical stresses of the mechanical part of the system was ignored. In this work, however, we consider a nonlinear model describing the dynamics of the wind turbine, the SCIG, and the SVC, the latter is used to regulate the generator terminal voltage.
- (4)
- The advanced MPC strategies have not been applied to all types of wind energy generation units.
- (5)
- The classical DMPC needs a high computational effort or can be difficult to implement, especially at high sampling frequency control; this can be solved by using Laguerre networks.
1.3. Contribution and Paper Organization
- (1)
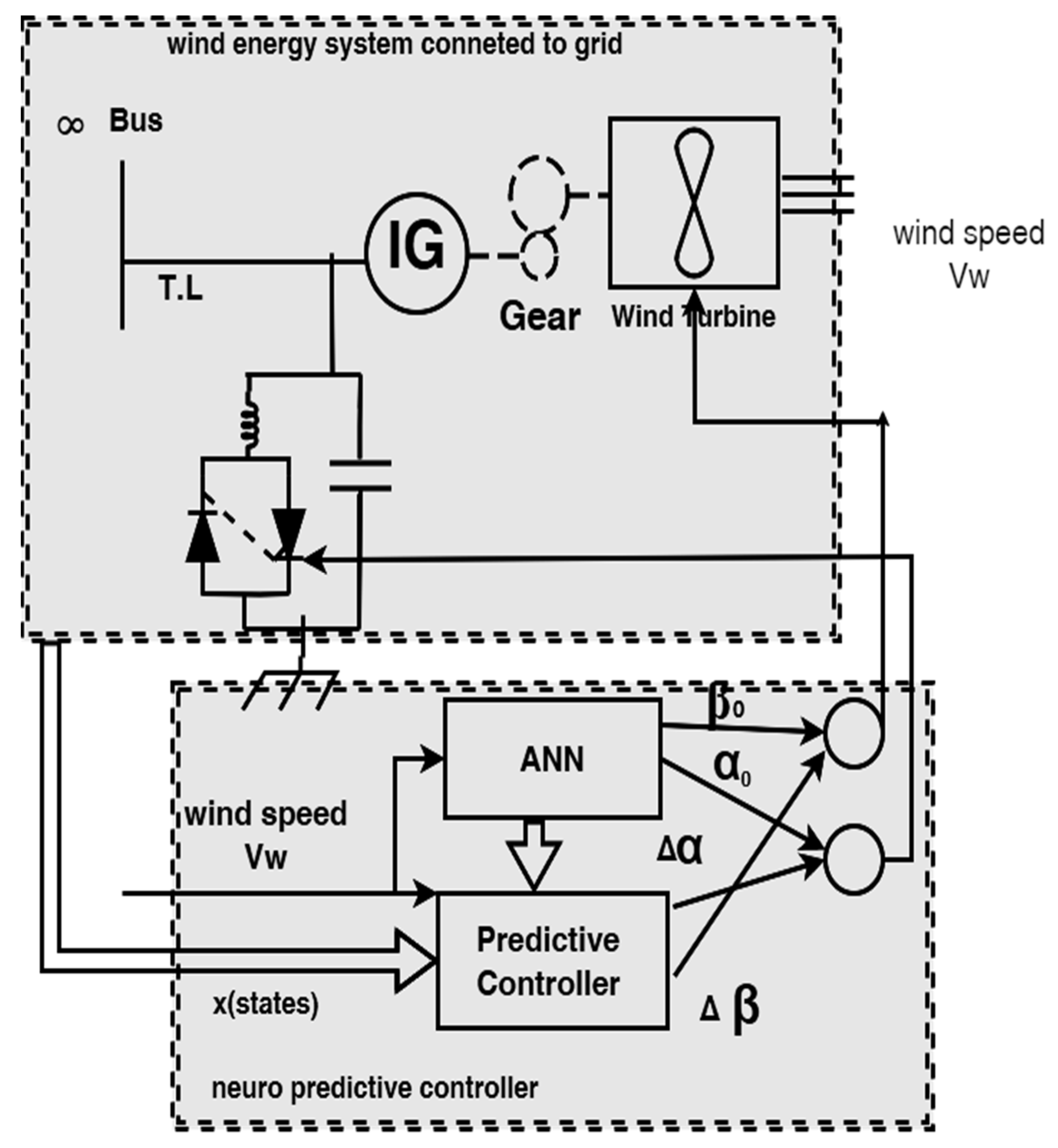
- This paper investigates a new hybrid control via predictive control Laguerre-based MPC and artificial neural network (LMPC-ANN) approaches. To the best of the authors’ knowledge, this scheme was not found in the WEC control systems literature.
- (2)
- Complexity of MPC conventional algorithms is reduced by using MPC Laguerre-based MPC which reduces the computational time and makes it easy to implement.
- (3)
- The integration between ANN and MPC, increases the ability of the proposed control system for smooth tracking, overshoot reduction, optimization, and modeling. In addition, the new control scheme has strongly robust properties. Additionally, it can be applied for uncertainties and disturbances which result from wind speed variation.
- (4)
- The obtained results via the proposed controller show that it stabilizes the system (the type 1 wind energy system connected to the grid, which suffers from instability problems) and manages to render the states of the system the same as the normal operating conditions, despite fluctuating wind speeds.
2. Materials and Methods
2.1. Control Objectives
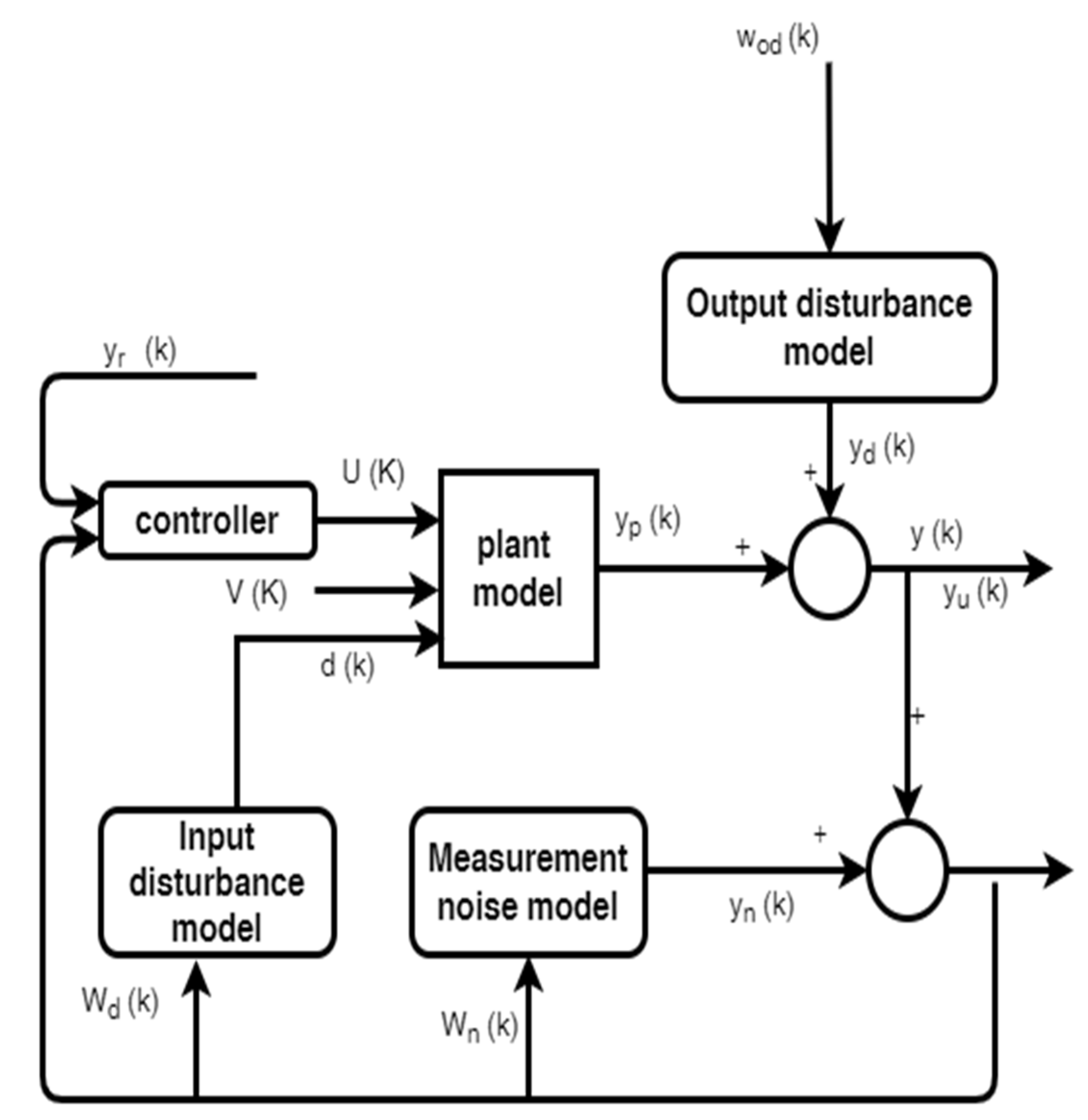
2.2. Modeling of the System
- is the instantaneous average wind speed.
- is the state vector of the systems.
- is the vector of the control inputs.
- are the system matrices given in Appendix A.
- .
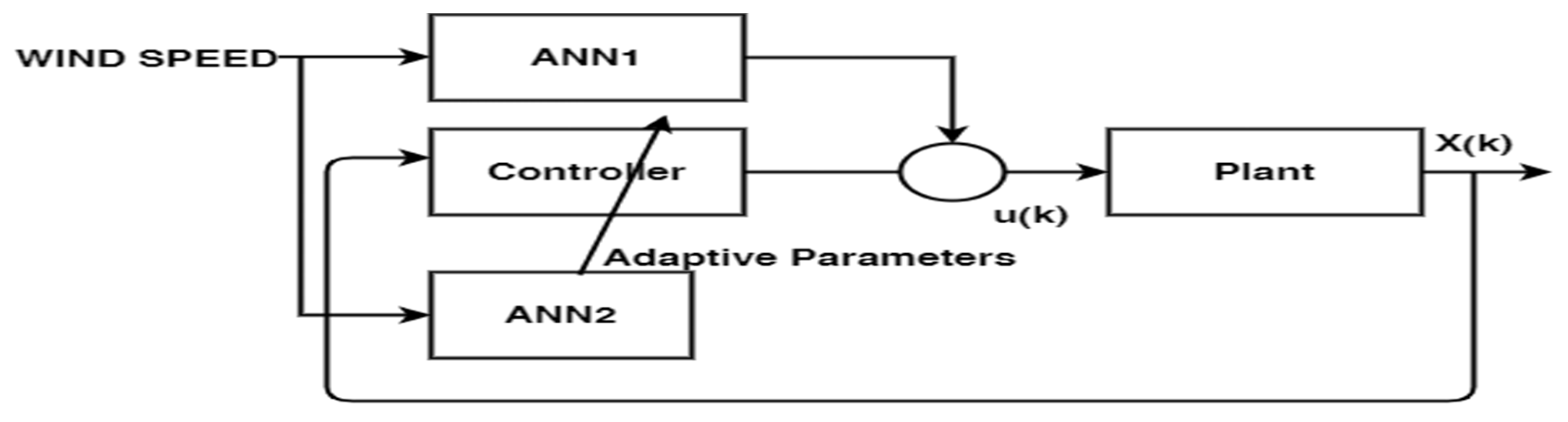
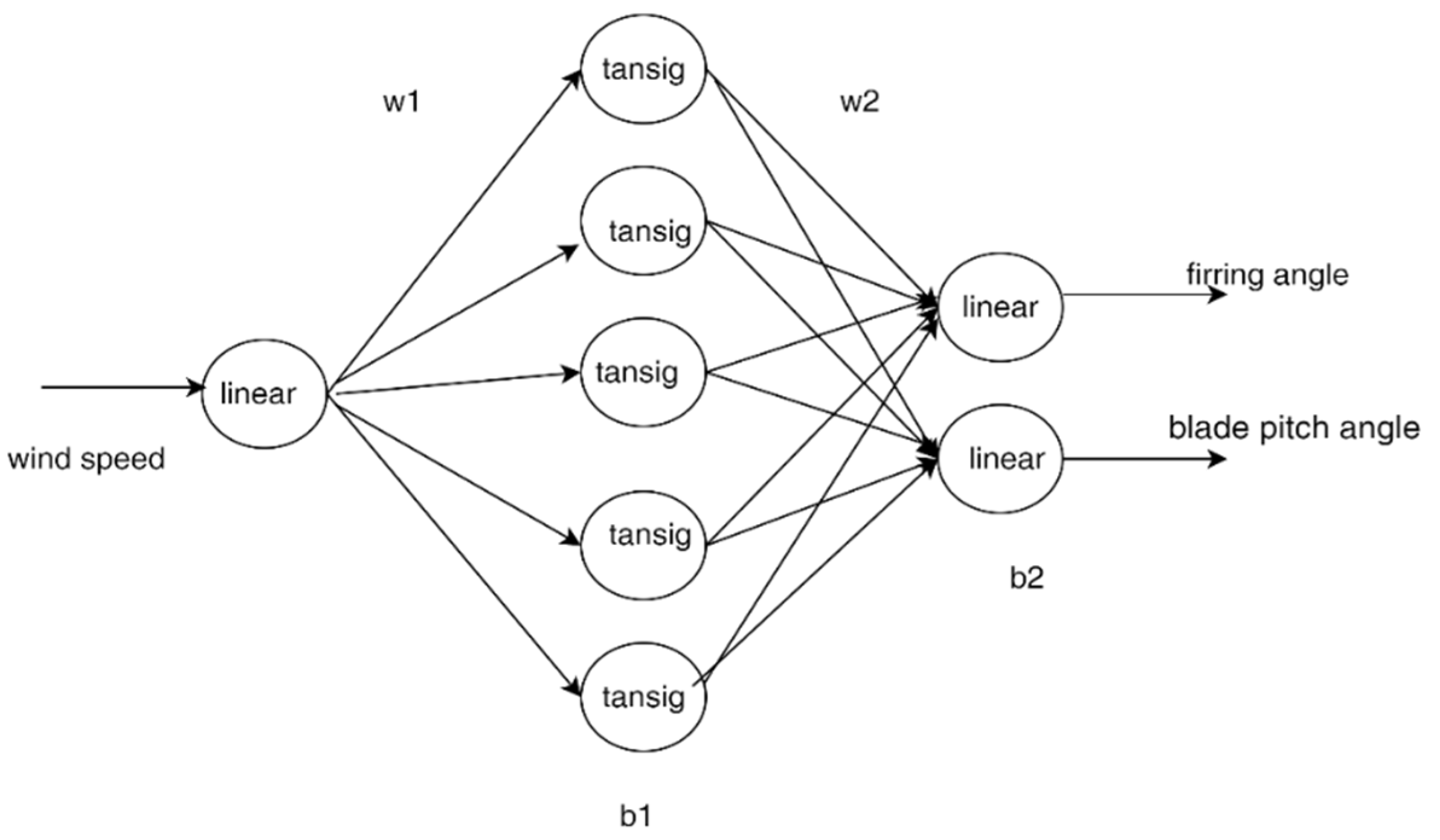
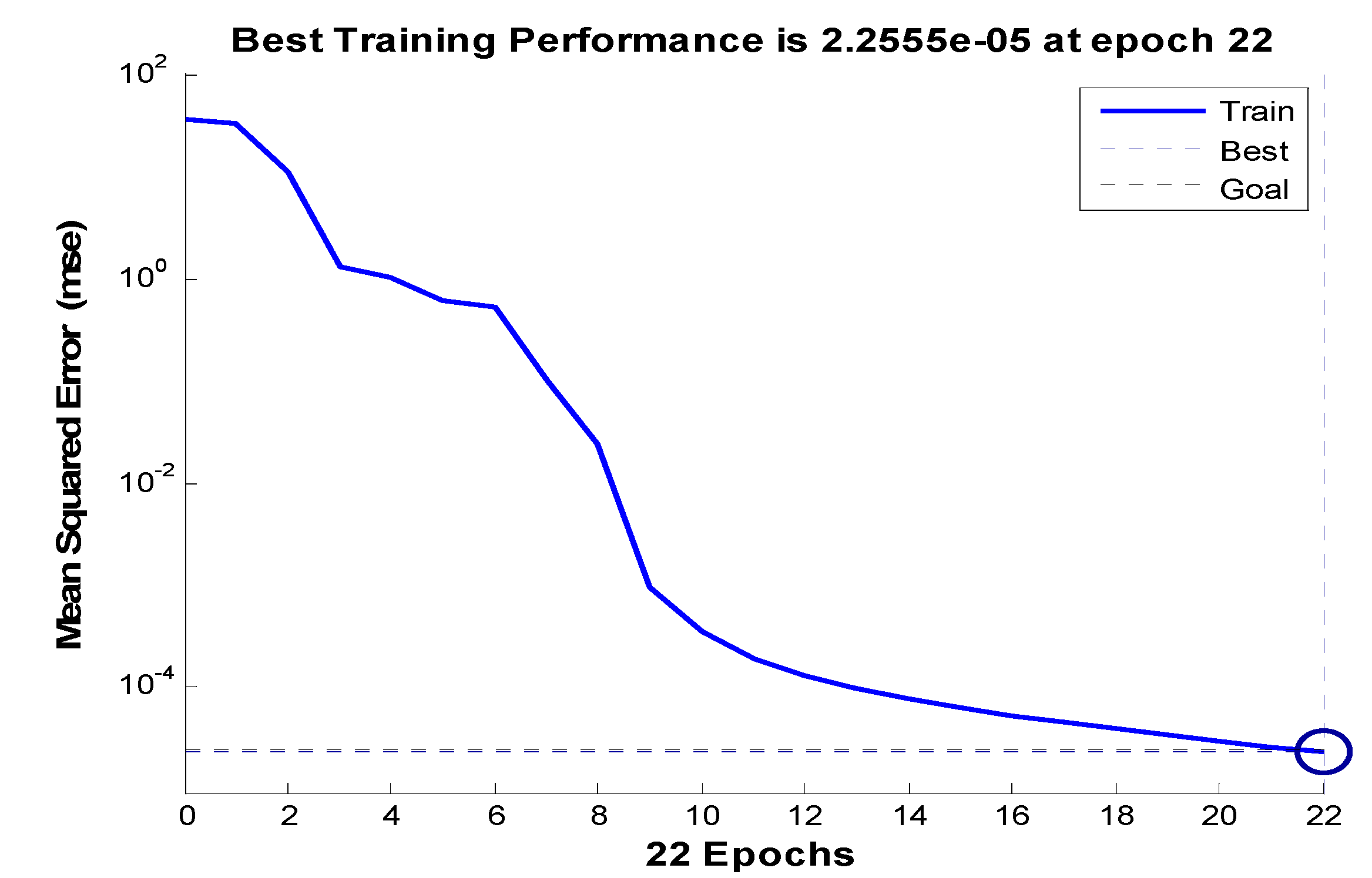
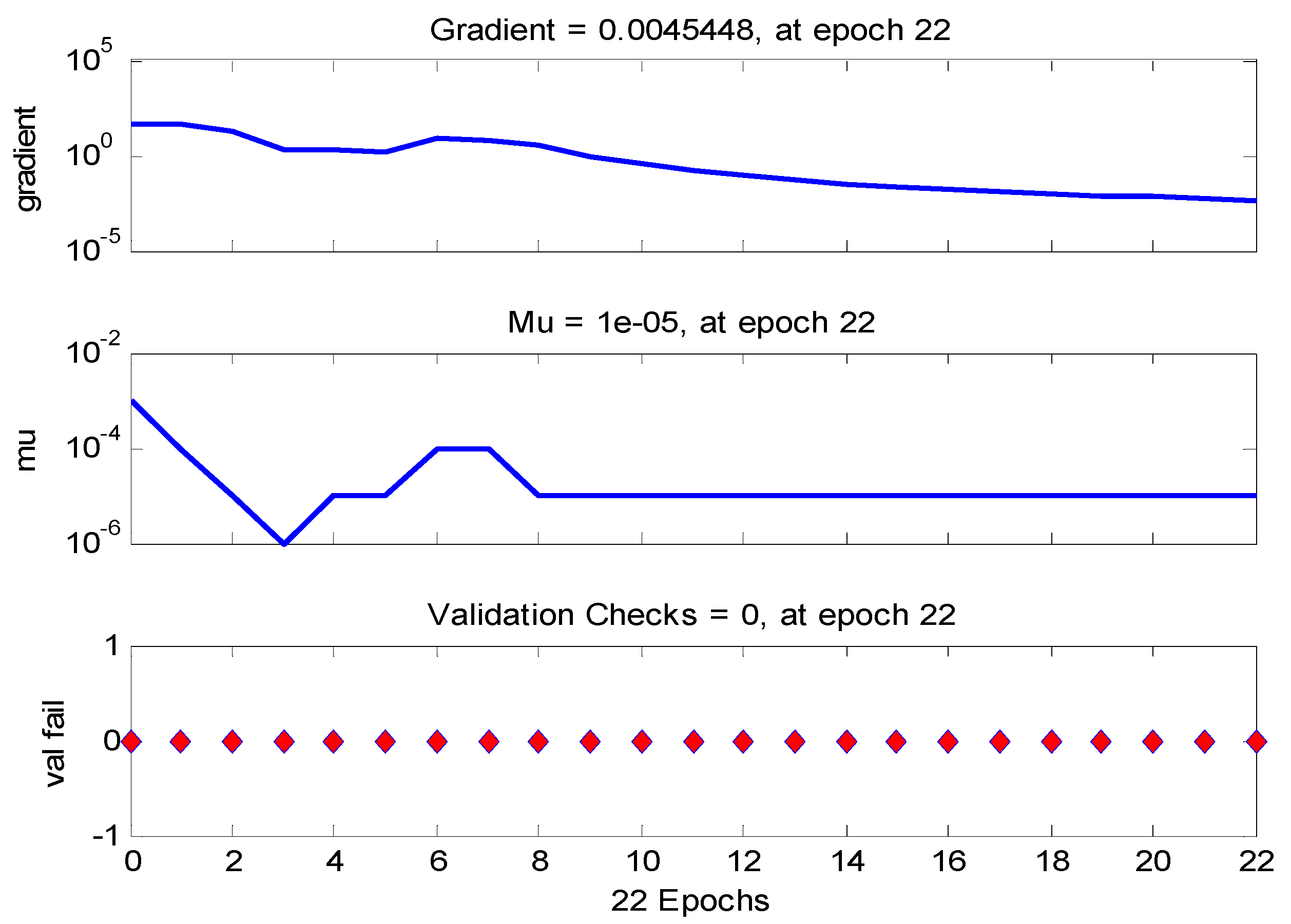
2.3. Training the ANN
2.4. MPC-Based Laguerre Function
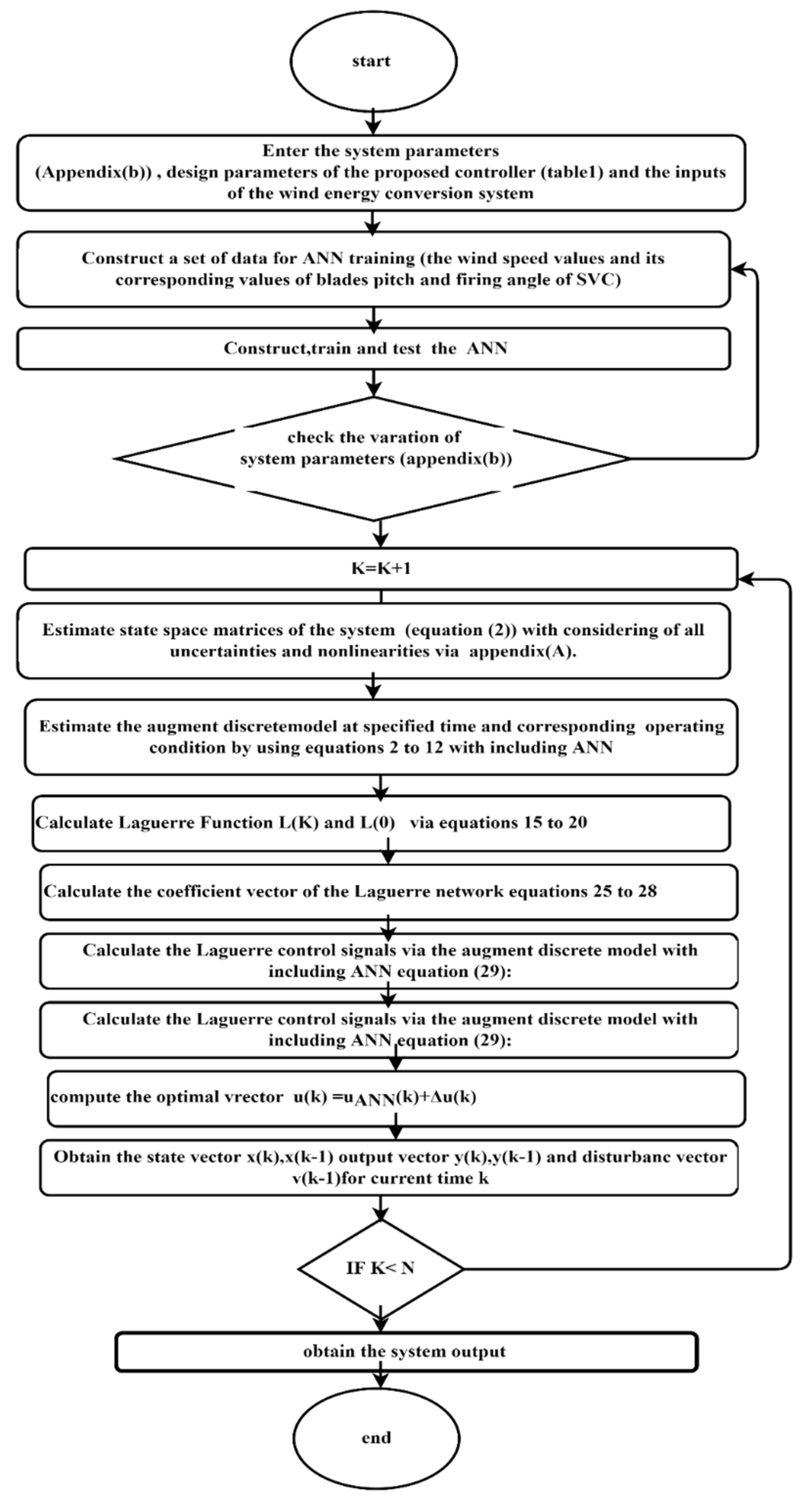
- Step 1:
- Enter the system parameters (Appendix B), design parameters of the proposed controller (Table 1), and the inputs of the wind energy conversion system.
- Step 2:
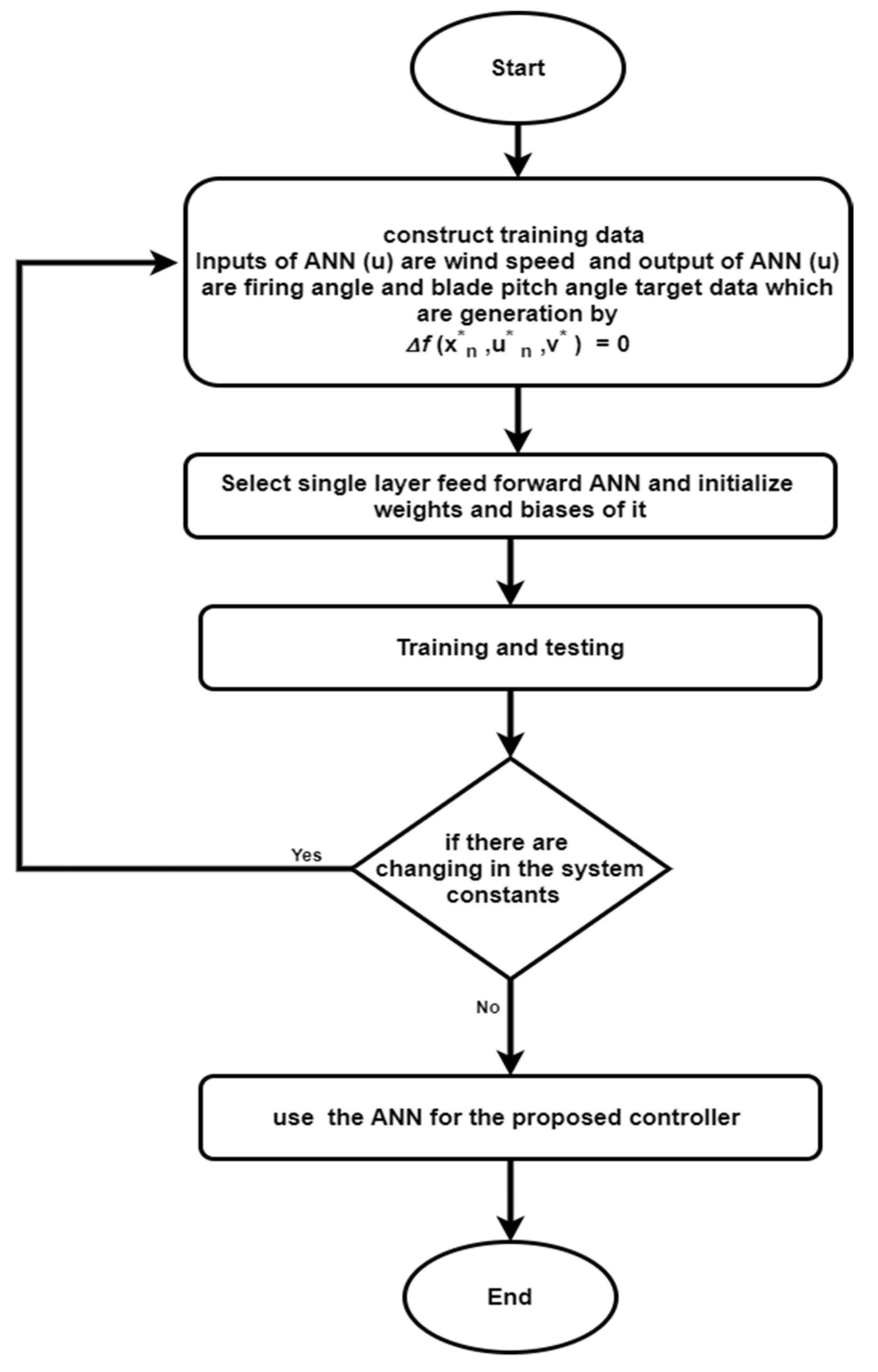
- Construct a set of data that contains the wind speed values and the corresponding values of blades pitch and firing angle of SVC for optimum power and voltage generation.
- Step 3:
- Construct, train, and test an ANN via the set data in step 2.
- Step 4:
- If there is no change in the system parameters go to step 5, or repeat step 2 and step 3.
- Step 5:
- Estimate the mathematical model of the system (Equation (2)) with consideration for all uncertainties and nonlinearities. It is estimated via thirteen differential equations for all system components which are given in Appendix A.
- Step 6:
- Estimate the augment discrete model at specified times and corresponding operating conditions by using step 5 and equations 2 to 12 including ANN.
- Step 7:
- Calculate the Laguerre function L(K) and L(0) via equations 15 to 20.
- Step 8:
- Calculate the coefficient vector of the Laguerre network equations 25 to 28.
- Step 9:
- Calculate the Laguerre control signals via the augment discrete model with including ANN as:
- Step 10:
- Calculate the control signals of ANN
- Step 11:
- Calculate the optimum control signals = +
- Step 12:
- Repeat steps 5 to 10 for the next instant until it reaches the N sample.
- Step 13:
- End.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter for Designing | The Values |
|---|---|
| lambda= | 0.9 |
| alpha | 1.5 |
| Β1 | |
| Time sampling | 0.01 |
| the number of terms for each input (N) | 10 |
| prediction horizon (Np) | 5 |
| contains the Laguerre pole locations for each input (a) | 0.9 |
3. Results and Discussion
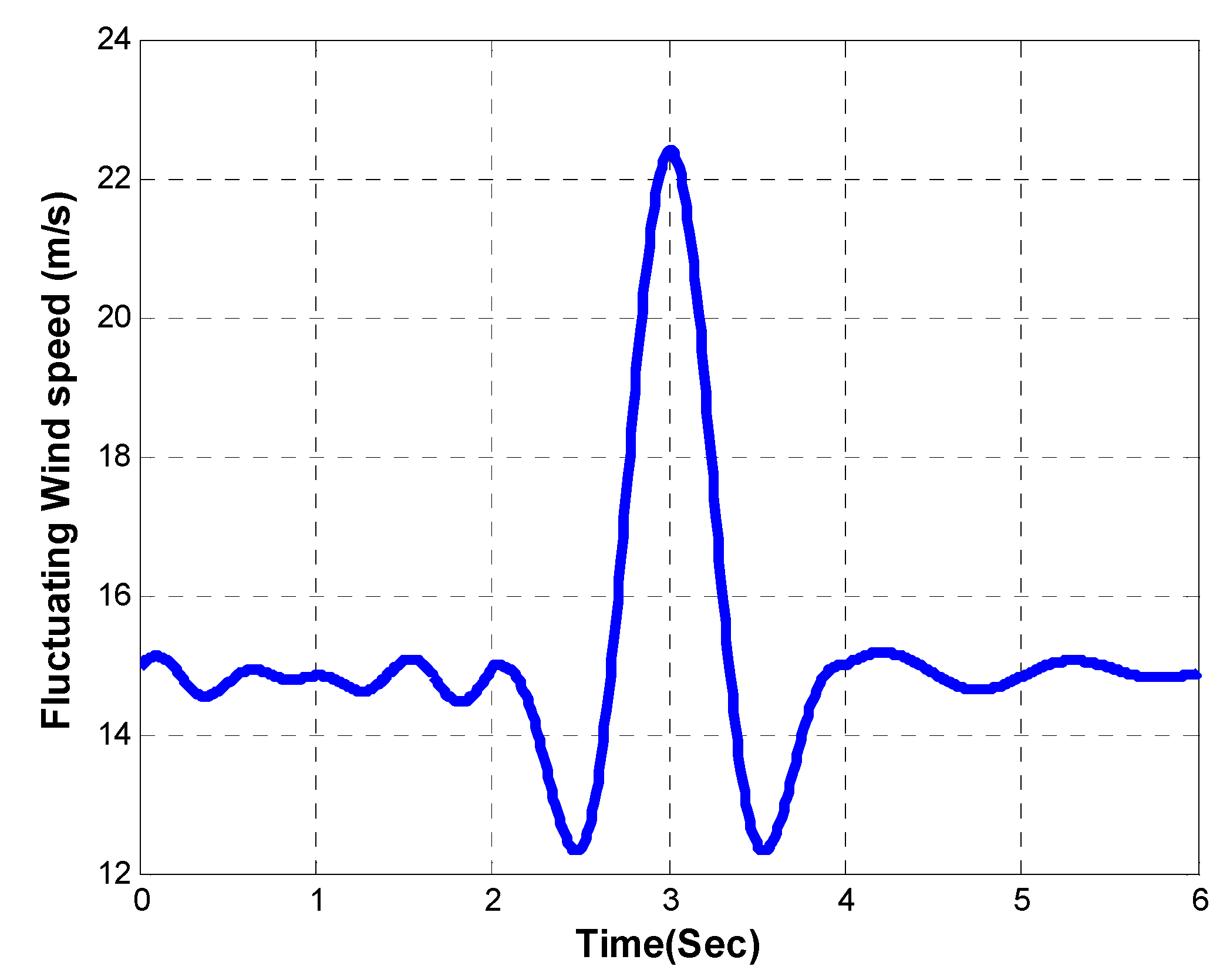
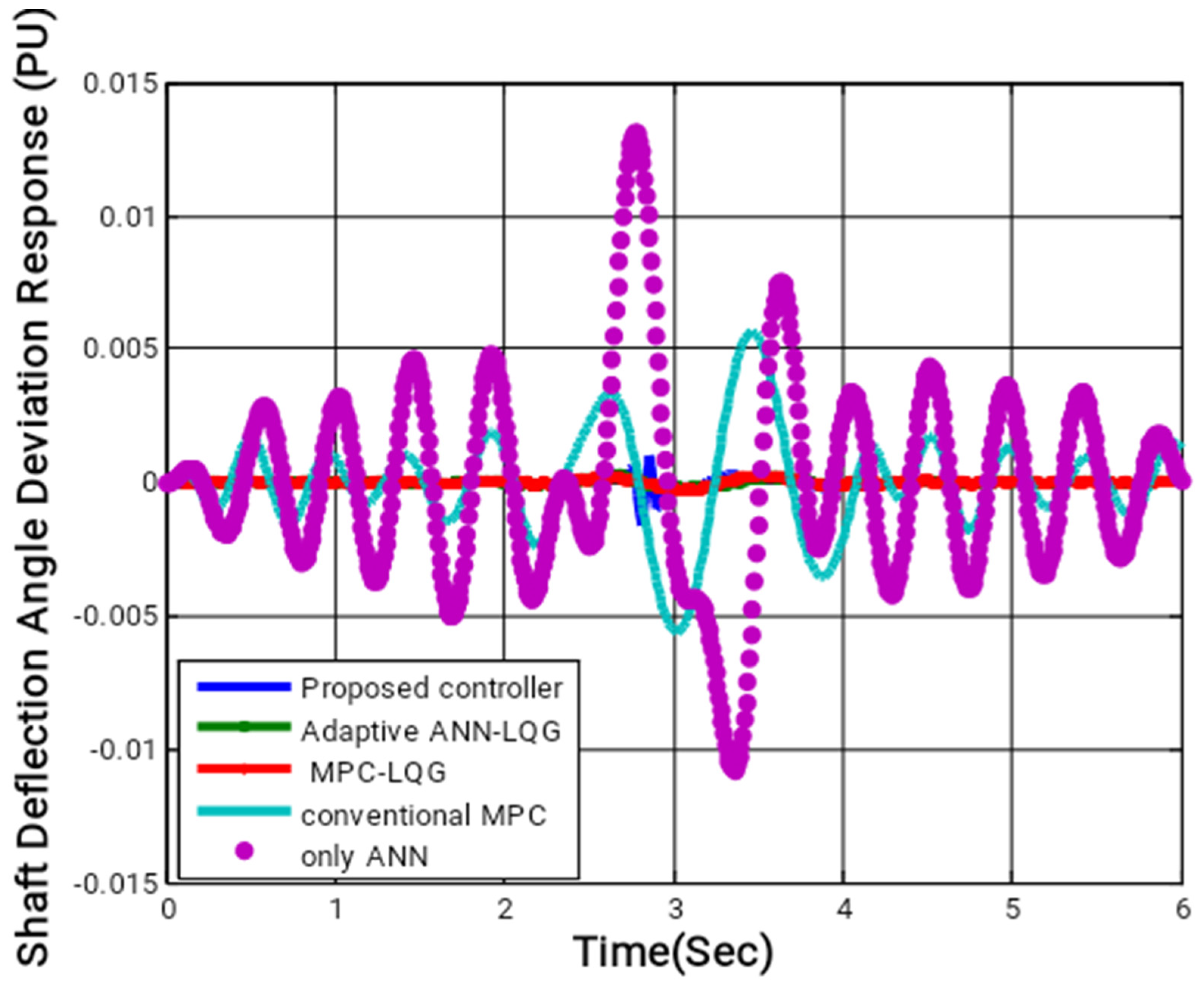
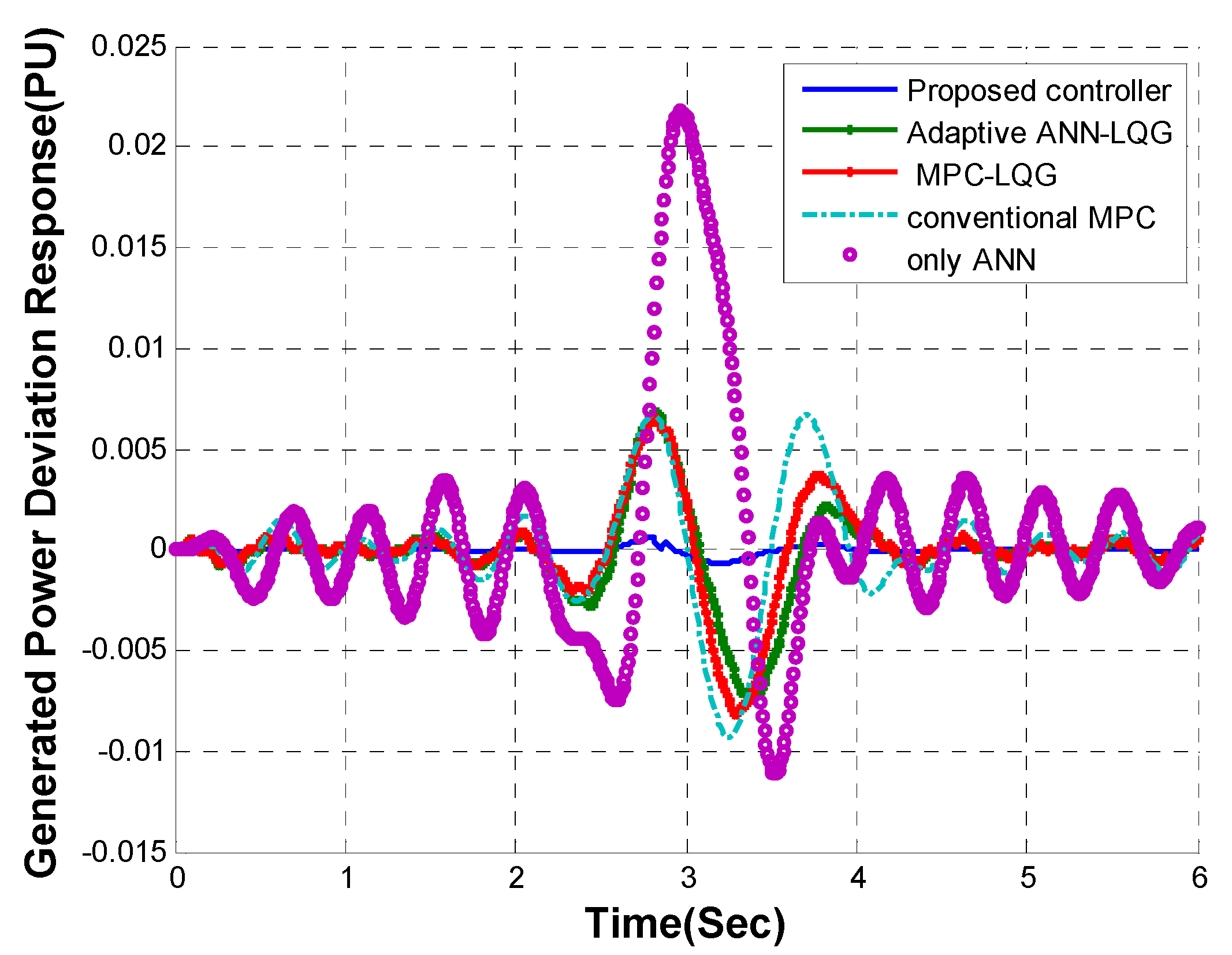
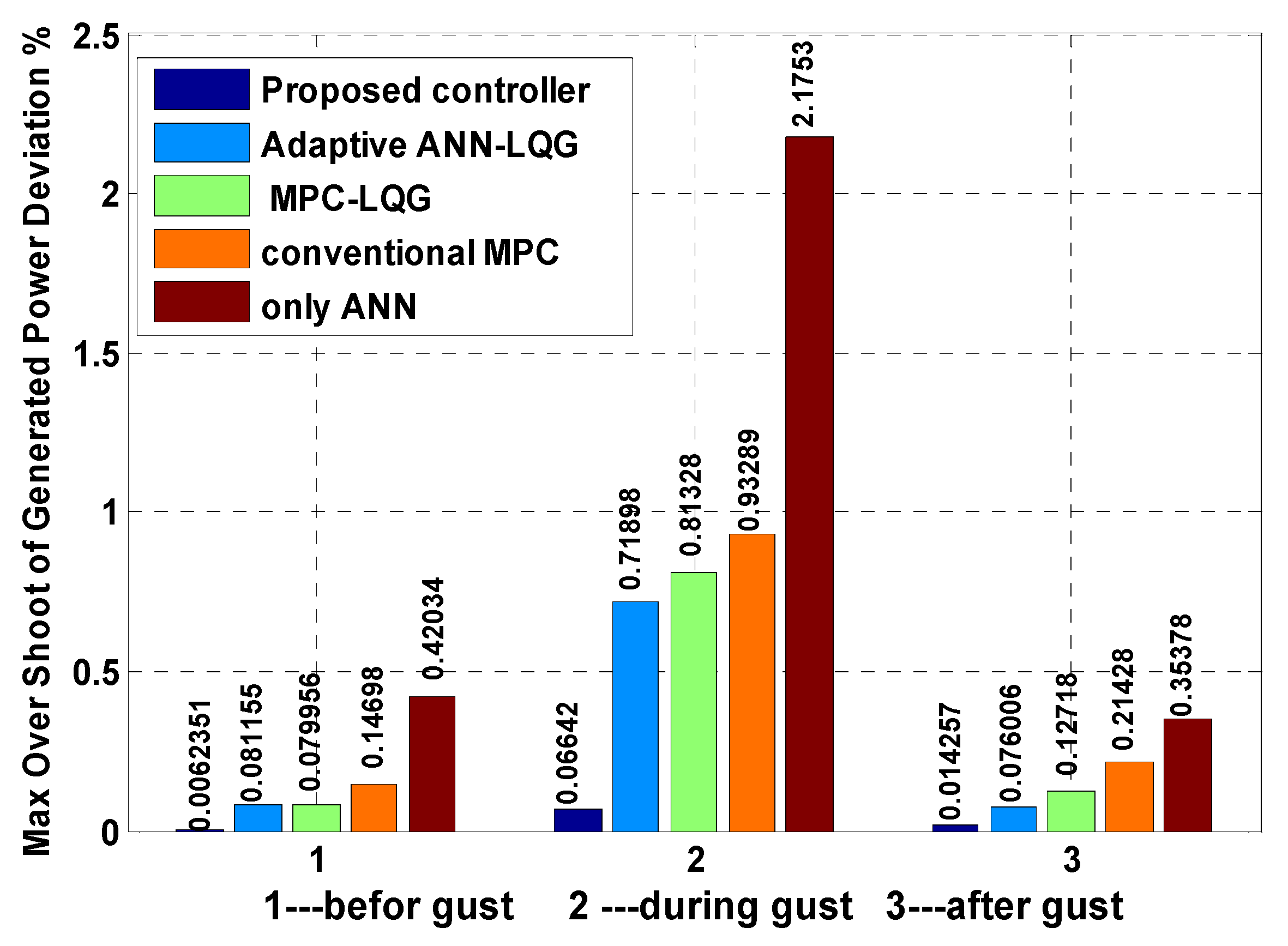
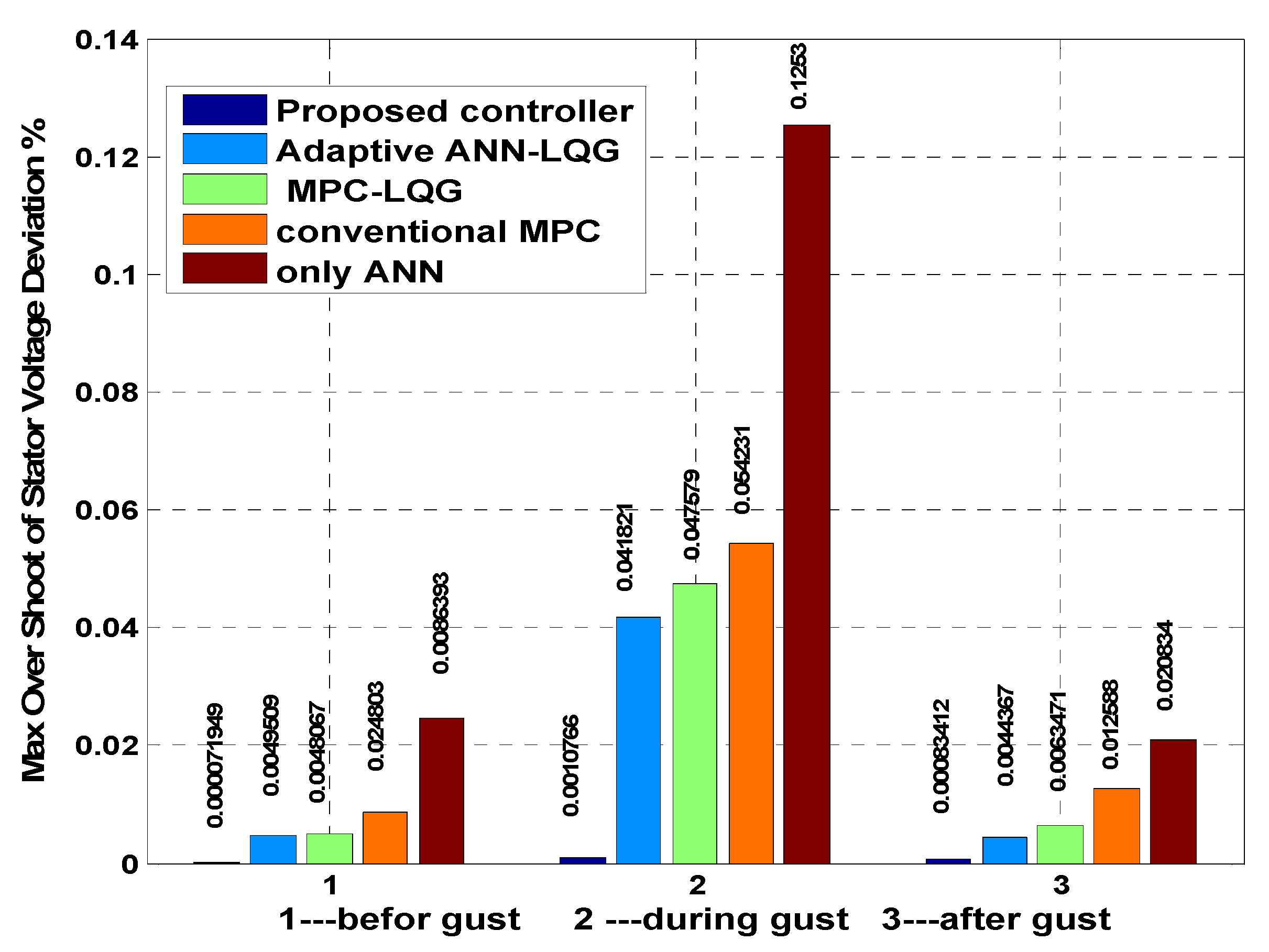
- REGION A (before gust):
- in this region, wind speed values are within a normal variation zone as shown in Figure 7; measurements are taken within the first two seconds.
- REGION B (during gust):
- this region is measured during wind gusts which are sudden variations in the wind speed as shown in Figure 7. Values are between t = 2 to t = 4 in this system.
- REGION C (after gust):
- this region is measured after wind gusts, the value of wind speed returns to the normal variation as is shown in Figure 7; they are measured as between t = 4 s and t = 6 s.
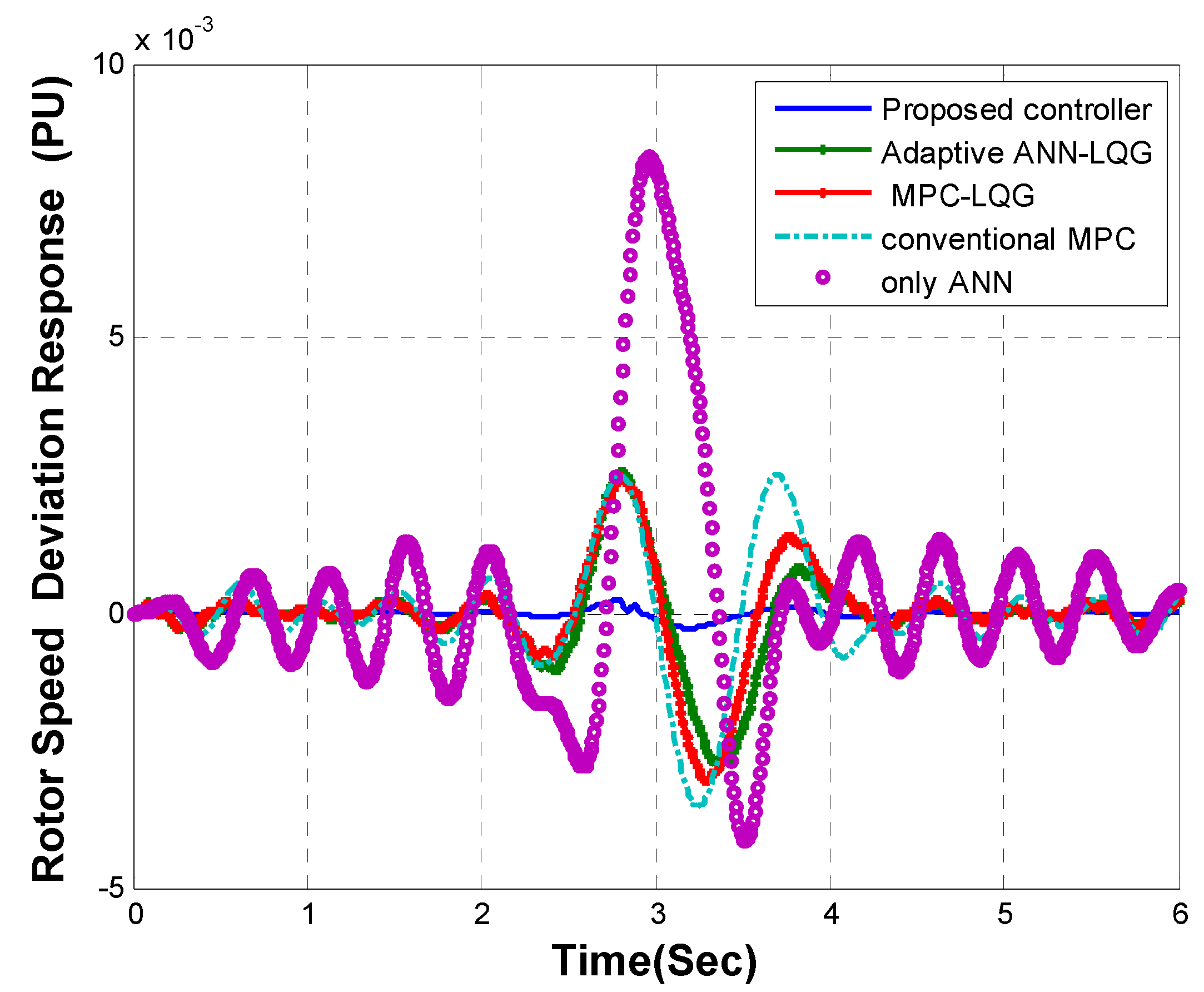
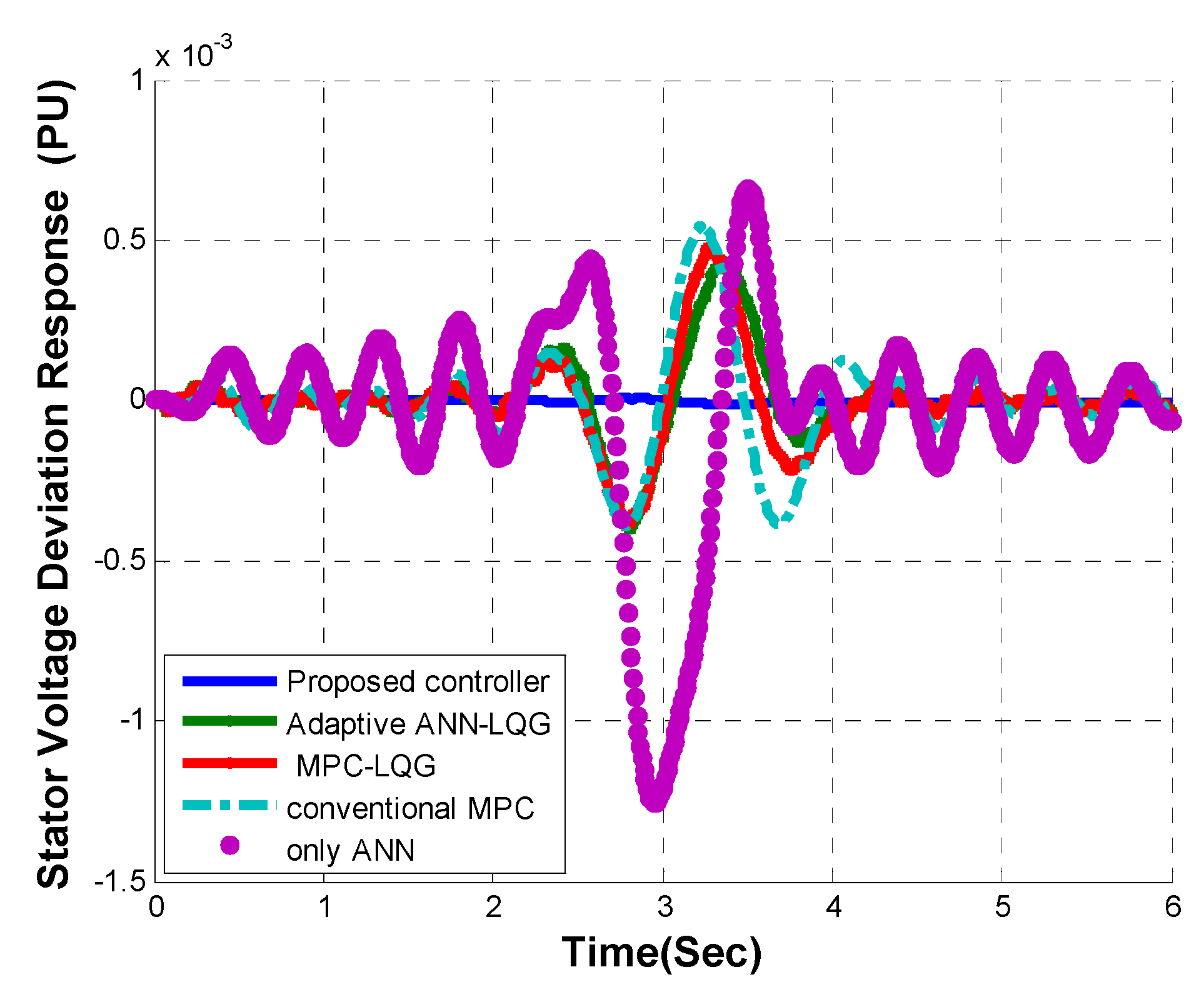
- The ANN only
- Conventional MPC [20] strategy is given in Appendix C
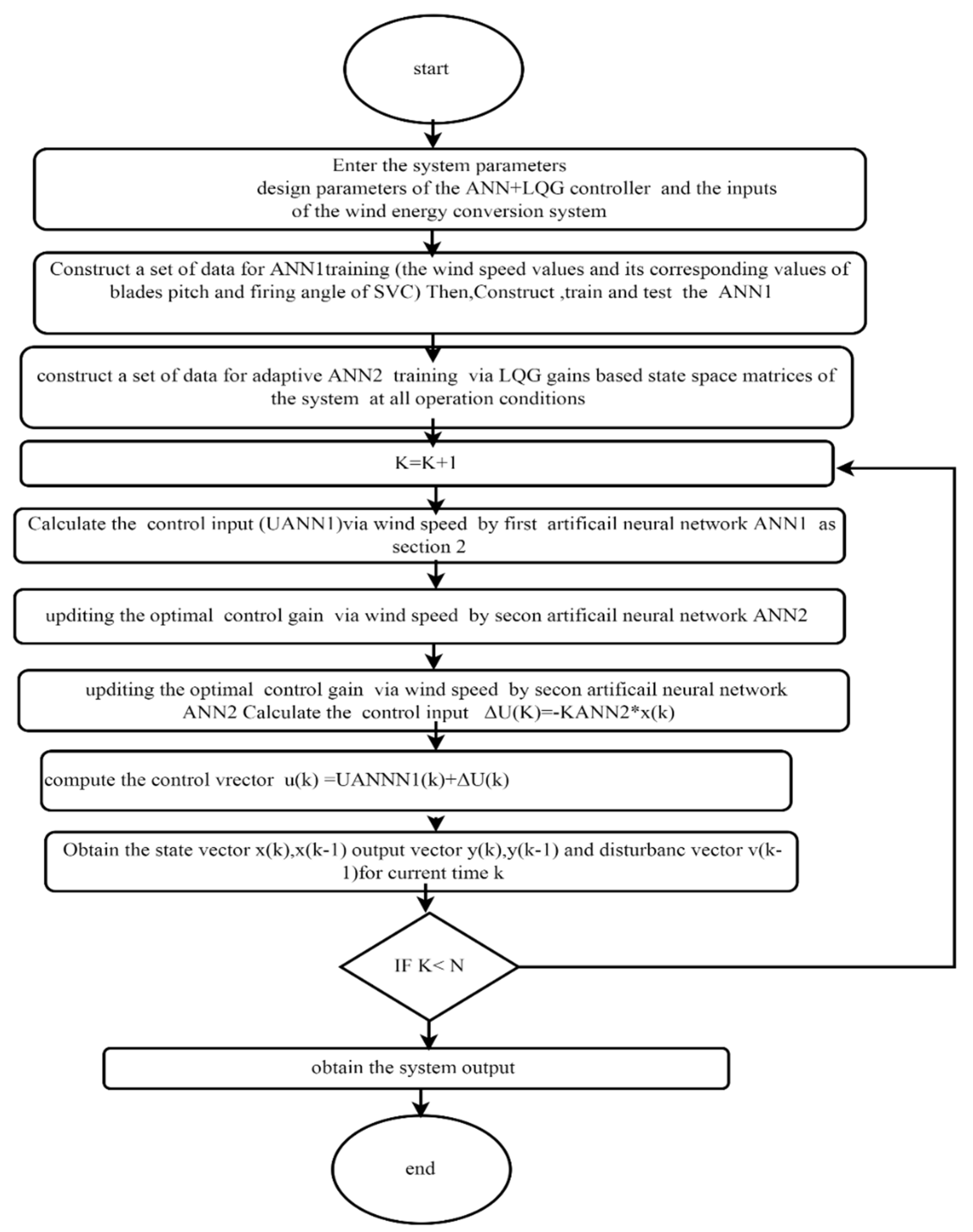
- Adaptive ANN-LQG [36] strategy is given in Appendix C
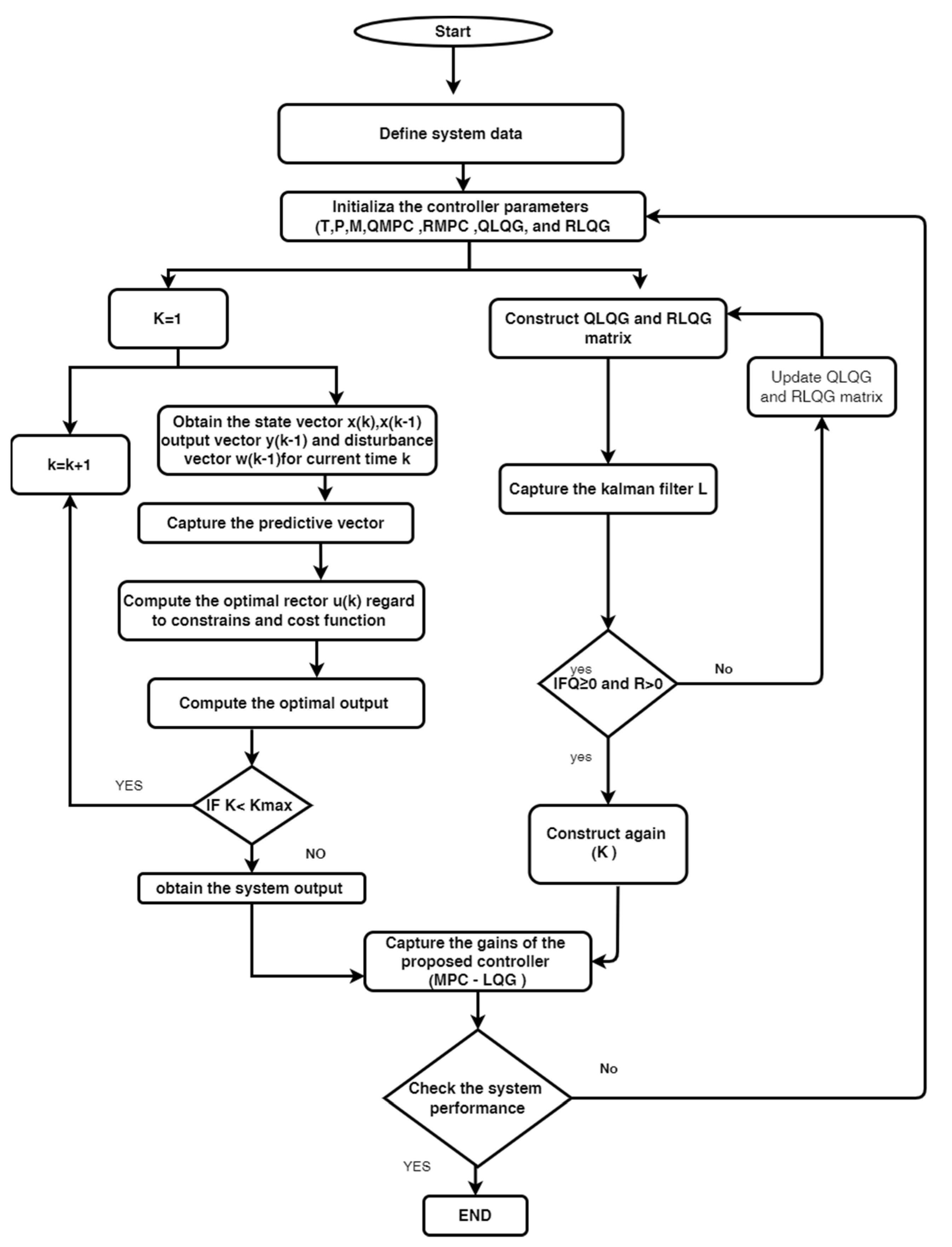
- Conventional MPC-LQG [31] strategy is given in Appendix D
- The proposed controller is neuro-predictive (LMPC-ANN)
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclatures
| SYMPOL | DESCRIBTION |
| (MPC) | Model predictive control |
| (ANN) | Artificial neural network |
| (SVC) | Static VAR compensator |
| (SCIG) | Squirrel cage induction generator |
| (FC-TCR) | Fixed-capacitor Thyristors controlled reactor |
| (WECS) | Wind energy conversion system |
| is the instantaneous average wind speed | |
| is the state vector of the systems | |
| is the vector of the control inputs such | |
| Blades pitch angle | |
| Firing angle | |
| are the system matrices | |
| The d component of stator current | |
| The q component of stator current | |
| The q component of rotor current | |
| Wind turbine angular speed | |
| The d component of TCR current | |
| The q component of TCR current | |
| The d component of T.L current | |
| The q component of T.L current | |
| Magnetizing reactance | |
| Am, Bm, Cm | are the state-space matrices |
| represent, respectively, the identity matrix and a matrix with zero entries with appropriate dimensions. | |
| ΔU | The control sequence |
| Nc | Control horizon |
| Np | Prediction horizon |
| x(ki + m|ki) | Predicted state variable vector at sample time m, given current state x(ki) |
| η | Parameter vector in the Laguerre expansion |
| c1, c2, · · ·,cN | are the coefficients of the Laguerre series expansion. |
| Δ | Deflection angle of the drive shaft, |
| Ψ. Ω | MPC cost function matrices |
| The stator voltage terminal | |
| Pg | generated power |
| Q and R | are used to tune the performance of the controller |
| (FC) | Fixed-capacitor |
| (TCR) | Thyristors controlled reactor |
| Induction generator torque | |
| Neuro-LQR | The conventional controller |
| y | Output signal |
| Damping Ds constant | |
| Gear box ratio | |
| Ks | The spring constant |
| Pairs no of pole | |
| Induction generator angular speed | |
| Entire constant generator | |
| Wind turbine angular speed | |
| Wind turbine torque | |
| Tip speed ratio | |
| Wind speed | |
| Stator speed | |
| Slip of the machine | |
| Equivalent reactance of the transmission line | |
| The d component of stator voltage | |
| Equivalent resistance of the transmission line | |
| The q components of stator voltage | |
| Equivalent reactance of the FC | |
| Equivalent reactance of the TCR | |
| Rotor resistance | |
| Differentiation operator | |
| L | Discrete and continuous-time Laguerre functions in vector form |
Appendix A. Modeling of a Wind Energy System Type 1
Appendix A.1. Wind Turbine
Appendix A.2. The SCIG
Appendix A.3. SVC Model
Appendix A.4. Transmission Line Model
Appendix B. System Parameters Data
Appendix C. MPC-LQG Controller


Appendix D. Adaptive ANN-LQG


Appendix E. Artificial Neural Network for the LMPC-ANN Controller

| Construction | Discerption |
|---|---|
| w1 | hidden and input neurons weight |
| b1 | hidden nodes biases |
| hidden layer output | oh = tansig (w1*in, b11) |
| w2 | Hidden and output weights |
| b2 | output nodes biases |
| The output of ANN | o1 = purelin (w2*oh, b2) |
Parameters Computation for for The LMPC-ANN Controller


References
- Ahmed, S.D.; Al-Ismail, F.S.M.; Shafiullah; Al-Sulaiman, F.A.; El-Amin, I.M. Grid Integration Challenges of Wind Energy: A Review. IEEE Access 2020, 8, 10857–10878. [Google Scholar] [CrossRef]
- Jha, D. A comprehensive review on wind energy systems for electric power generation: Current situation and improved technologies to realize future development. Int. J. Renew. Energy Res. 2017, 7, 1786–1805. [Google Scholar]
- García-Sánchez, T.; Muñoz-Benavente, I.; Gómez-Lázaro, E.; Fernández-Guillamón, A. Modelling Types 1 and 2 Wind Turbines Based on IEC 61400-27-1: Transient Response under Voltage Dips. Energies 2020, 13, 4078. [Google Scholar] [CrossRef]
- International Electrotechnical Commissio. Wind Turbines—Part 21: Measurement and Assessment of Power Quality Characteristics of Grid Connected Wind Turbines; IEC 61400-21; International Electro Technical Commission (IEC): Geneva, Switzerland, 2008. [Google Scholar]
- Tsili, M.; Papathanassiou, S. A review of grid code technical requirements for wind farms. IET Renew. Power Gener. 2009, 3, 308. [Google Scholar] [CrossRef]
- Mayosky, M.; Cancelo, I. Direct adaptive control of wind energy conversion systems using Gaussian networks. IEEE Trans. Neural Netw. 1999, 10, 898–906. [Google Scholar] [CrossRef]
- Dekali, Z.; Baghli, L.; Boumediene, A. Indirect power control for a Grid Connected Double Fed Induction Generator Based Wind Turbine Emulator. In Proceedings of the 2019 International Conference on Advanced Electrical Engineering (ICAEE), Dhaka, Bangladesh, 26–28 September 2019; pp. 1–6. [Google Scholar]
- Abokhalil, A. Grid Connection Control of DFIG for Variable Speed Wind Turbines under Turbulent Conditions. Int. J. Renew. Energy Res. 2019, 9, 1260–1271. [Google Scholar] [CrossRef]
- Chen, J.; Yao, W.; Zhang, C.-K.; Ren, Y.; Jiang, L. Design of robust MPPT controller for grid-connected PMSG-Based wind turbine via perturbation observation based nonlinear adaptive control. Renew. Energy 2018, 134, 478–495. [Google Scholar] [CrossRef]
- Sharaf, A.M.; Wang, G. Wind energy system voltage and energy enhancement using low cost dynamic capacitor compensation scheme. In Proceedings of the International Conference on Electrical, Electronic and Computer Engineering, ICEEC’04, Cairo, Egypt, 5–7 September 2004. [Google Scholar]
- Tamaarat, A.; Benakcha, A. Performance of PI controller for control of active and reactive power in DFIG operating in a grid-connected variable speed wind energy conversion system. Front. Energy 2014, 8, 371–378. [Google Scholar] [CrossRef]
- Zidani, Y.; Zouggar, S.; Elbacha, A. Steady-State Analysis and Voltage Control of the Self-Excited Induction Generator Using Artificial Neural Network and an Active Filter. Iran. J. Sci. Technol. Trans. Electr. Eng. 2017, 42, 41–48. [Google Scholar] [CrossRef]
- Colak, M.; Cetinbas, I.; Demirtas, M. Fuzzy Logic and Artificial Neural Network Based Grid-Interactive Systems for Renewable Energy Sources: A Review. In Proceedings of the 2021 9th International Conference on Smart Grid (icSmartGrid), Setubal, Portugal, 29 June–1 July 2021. [Google Scholar] [CrossRef]
- Sun, H.; Qiu, C.; Lu, L.; Gao, X.; Chen, J.; Yang, H. Wind turbine power modelling and optimization using artificial neural network with wind field experimental data. Appl. Energy 2020, 280, 115880. [Google Scholar] [CrossRef]
- Hosseini, E.; Behzadfar, N.; Hashemi, M.; Moazzami, M.; Dehghani, M. Control of Pitch Angle in Wind Turbine Based on Doubly Fed Induction Generator Using Fuzzy Logic Method. J. Renew. Energy Environ. 2022, 9, 1–7. [Google Scholar]
- Bostani, Y.; Jalilzadeh, S.; Mobayen, S.; Rojsiraphisal, T.; Bartoszewicz, A. Damping of Subsynchronous Resonance in Utility DFIG-Based Wind Farms Using Wide-Area Fuzzy Control Approach. Energies 2022, 15, 1787. [Google Scholar] [CrossRef]
- Shaukat, N.; Khan, B.; Ali, S.M.; Waseem, A. A Control Approach Based on Fuzzy Logic for Grid-Interfaced Wind Energy Conversion System. In Proceedings of the 2021 International Conference on Engineering and Emerging Technologies (ICEET), Istanbul, Turkey, 27–28 October 2021. [Google Scholar] [CrossRef]
- Mousavi, Y.; Bevan, G.; Kucukdemiral, I.B.; Fekih, A. Sliding mode control of wind energy conversion systems: Trends and applications. Renew. Sustain. Energy Rev. 2022, 167, 112734. [Google Scholar] [CrossRef]
- Aziz, D.; Jamal, B.; Othmane, Z.; Khalid, M.; Bossoufi, B. Implementation and validation of backstepping control for PMSG wind turbine using ds PACE controller board. Energy Rep. 2019, 5, 807–821. [Google Scholar]
- Yaramasu, V.; Kouro, S.; Dekka, A.; Alepuz, S.; Rodriguez, J.; Duran, M. Power conversion and predictive control of wind energy conversion systems. In Advanced Control and Optimization Paradigms for Wind Energy Systems; Springer: Singapore, 2019; pp. 113–139. [Google Scholar] [CrossRef]
- Yessef, M.; Bossoufi, B.; Taoussi, M.; Lagrioui, A.; Chojaa, H. Overview of control strategies for wind turbines: ANNC, FLC, SMC, BSC, and PI controllers. Wind. Eng. 2022, 0309524X221109512. [Google Scholar] [CrossRef]
- Reddy, Y.-S.; Hur, S.-H. Comparison of Optimal Control Designs for a 5 MW Wind Turbine. Appl. Sci. 2021, 11, 8774. [Google Scholar] [CrossRef]
- Sahoo, S.; Subudhi, B.; Panda, G. Comparison of Output Power Control Performance of Wind Turbine using PI, Fuzzy Logic and Model Predictive Controllers. Int. J. Renew. Energy Res. 2018, 8, 1062–1070. [Google Scholar] [CrossRef]
- Sahu, S.; Behera, S. A review on modern control applications in wind energy conversion system. Energy Environ. 2022, 33, 223–262. [Google Scholar] [CrossRef]
- Wei, J.; Wu, Q.; Li, C.; Huang, S.; Zhou, B.; Chen, D. Hierarchical Event-Triggered MPC-Based Coordinated Control for HVRT and Voltage Restoration of Large-Scale Wind Farm. IEEE Trans. Sustain. Energy 2022, 13, 1819–1829. [Google Scholar] [CrossRef]
- Hu, J.; Li, Y.; Zhu, J. Multi-objective model predictive control of doubly-fed induction generators for wind energy conversion. IET Gener. Transm. Distrib. 2019, 13, 21–29. [Google Scholar] [CrossRef]
- Kong, X.; Wang, X.; Abdelbaky, M.A.; Liu, X.; Lee, K.Y. Nonlinear MPC for DFIG-based wind power generation under unbalanced grid conditions. Int. J. Electr. Power Energy Syst. 2021, 134, 107416. [Google Scholar] [CrossRef]
- Kong, X.; Ma, L.; Wang, C.; Guo, S.; Abdelbaky, M.A.; Liu, X.; Lee, K.Y. Large-scale wind farm control using distributed economic model predictive scheme. Renew. Energy 2021, 181, 581–591. [Google Scholar] [CrossRef]
- Dashtdar, M.; Flah, A.; El-Bayeh, C.Z.; Tostado-Véliz, M.; Al Durra, A.; Abdel Aleem, S.H.; Ali, Z.M. Frequency control of the islanded micro grid based on optimized model predictive control by PSO. IET Renew. Power Gener. 2022, 16, 2088–2100. [Google Scholar] [CrossRef]
- Mohamed, M.A.; Diab, A.A.Z.; Rezk, H.; Jin, T. A novel adaptive model predictive controller for load frequency control of power systems integrated with DFIG wind turbines. Neural Comput. Appl. 2019, 32, 7171–7181. [Google Scholar] [CrossRef]
- Khamies, M.; Magdy, G.; Kamel, S.; Khan, B. Optimal model predictive and linear quadratic Gaussian control for frequency sta-bility of power systems considering wind energy. IEEE Access 2021, 9, 116453–116474. [Google Scholar] [CrossRef]
- Wang, L. Discrete model predictive controller design using Laguerre functions. J. Process Control 2004, 14, 131–142. [Google Scholar] [CrossRef]
- Wang, L. Model Predictive Control System Design and Implementation Using MATLAB®. In Advances in Industrial Control, 2nd ed.; Springer-Verlag: London, UK, 2009. [Google Scholar]
- Wahlberg, B. System identification using Laguerre models. IEEE Trans. Autom. Control 1991, 36, 551–562. [Google Scholar] [CrossRef]
- Pinheiro, T.C.F.; Silveira, A.S. Constrained discrete model predictive control of an arm-manipulator using Laguerre function. Optim. Control Appl. Methods 2020, 42, 160–179. [Google Scholar] [CrossRef]
- Jamsheed, F.; Iqbal, S.J. An Adaptive Neural Network-Based Controller to Stabilize Power Oscillations in Wind-integrated Power Systems. IFAC-PapersOnLine 2022, 55, 740–745. [Google Scholar] [CrossRef]
- Boukhezzar, B.; Siguerdidjane, H. Nonlinear Control of a Variable-Speed Wind Turbine Using a Two-Mass Model. IEEE Trans. Energy Convers. 2010, 26, 149–162. [Google Scholar] [CrossRef]
- Rasila, M. Torque-and Speed Control of a Pitch Regulated Wind Turbine. Master’s Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2003. [Google Scholar]
- Ezzeldin, S.A.; Xu, W. Control Design and Dynamic Performance Analysis of a Wind Turbine-Induction Generator Unit. IEEE Trans. Energy Convers. 2000, 15, 73–78. [Google Scholar]
- Jovcic, D.; Pahalawaththa, N.; Zavahir, M.; Hassan, H. SVC dynamic analytical model. IEEE Trans. Power Deliv. 2003, 18, 1455–1461. [Google Scholar] [CrossRef]













| Strategies | System with a ANN Only | System with a Conventional MPC | System with a ANN + LQG | System with a MPC + LQG | System with Proposed Controller | |
|---|---|---|---|---|---|---|
| Modes | ||||||
| Before gust | 0.420343 | 0.146984 | 0.081155 | 0.079956 | 6.24 × 10−3 | |
| During gust | 2.175327 | 0.932889 | 0.813277 | 0.718984 | 0.06642 | |
| Under guest | 0.353782 | 0.214282 | 0.127183 | 0.076006 | 0.014257 | |
| Strategies | System with a ANN only | System with a Conventional MPC | System with a ANN + LQG | System with a MPC + LQG | System with Proposed Controller | |
|---|---|---|---|---|---|---|
| Modes | ||||||
| Before gust | 0.024803 | 0.008639 | 0.004951 | 8.85 × 10−5 | 7.741 ×10−5 | |
| During gust | 0.125297 | 0.054231 | 0.047579 | 0.000287 | 0.00162 | |
| Under guest | 0.020834 | 0.012588 | 0.006347 | 6.26552 × 10−5 | 0.000171 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohamed, M.A.-E.-H.; Abbas, H.S.; Shouran, M.; Kamel, S. A Neuro-Predictive Controller Scheme for Integration of a Basic Wind Energy Generation Unit with an Electrical Power System. Energies 2022, 15, 5839. https://0-doi-org.brum.beds.ac.uk/10.3390/en15165839
Mohamed MA-E-H, Abbas HS, Shouran M, Kamel S. A Neuro-Predictive Controller Scheme for Integration of a Basic Wind Energy Generation Unit with an Electrical Power System. Energies. 2022; 15(16):5839. https://0-doi-org.brum.beds.ac.uk/10.3390/en15165839
Chicago/Turabian StyleMohamed, Mohamed Abd-El-Hakeem, Hossam Seddik Abbas, Mokhtar Shouran, and Salah Kamel. 2022. "A Neuro-Predictive Controller Scheme for Integration of a Basic Wind Energy Generation Unit with an Electrical Power System" Energies 15, no. 16: 5839. https://0-doi-org.brum.beds.ac.uk/10.3390/en15165839