Reconstruction and Nowcasting of Rainfall Field by Oblique Earth-Space Links Network: Preliminary Results from Numerical Simulation


Abstract
:
1. Introduction
- (1)
- Large spatial region. The reconstruction of rainfall field with 1×1 km2 resolution is performed in the Jiangning district of Nanjing, China, whose area is approximately 1225 km2. The experimental results show the great potential of the OELs network in large scale rainfall monitoring.
- (2)
- Lots of data validations. Except for the validation of rain intensity inversion by a single link, the performance of the OELs network for rainfall field reconstruction is validated by using the satellite data during the plum rain season from 2016 to 2019.
- (3)
- Accurate rainfall field prediction. The designed deep learning network is used to achieve rainfall field nowcasting based on the observations of the OELs network. In validation experiment, the sequential change of rainfall field is predicted successfully.
2. Field Measurement of Mainfall from OEL
2.1. Inversion of Rain Intensity by a Single OEL
2.2. Experimental Setup
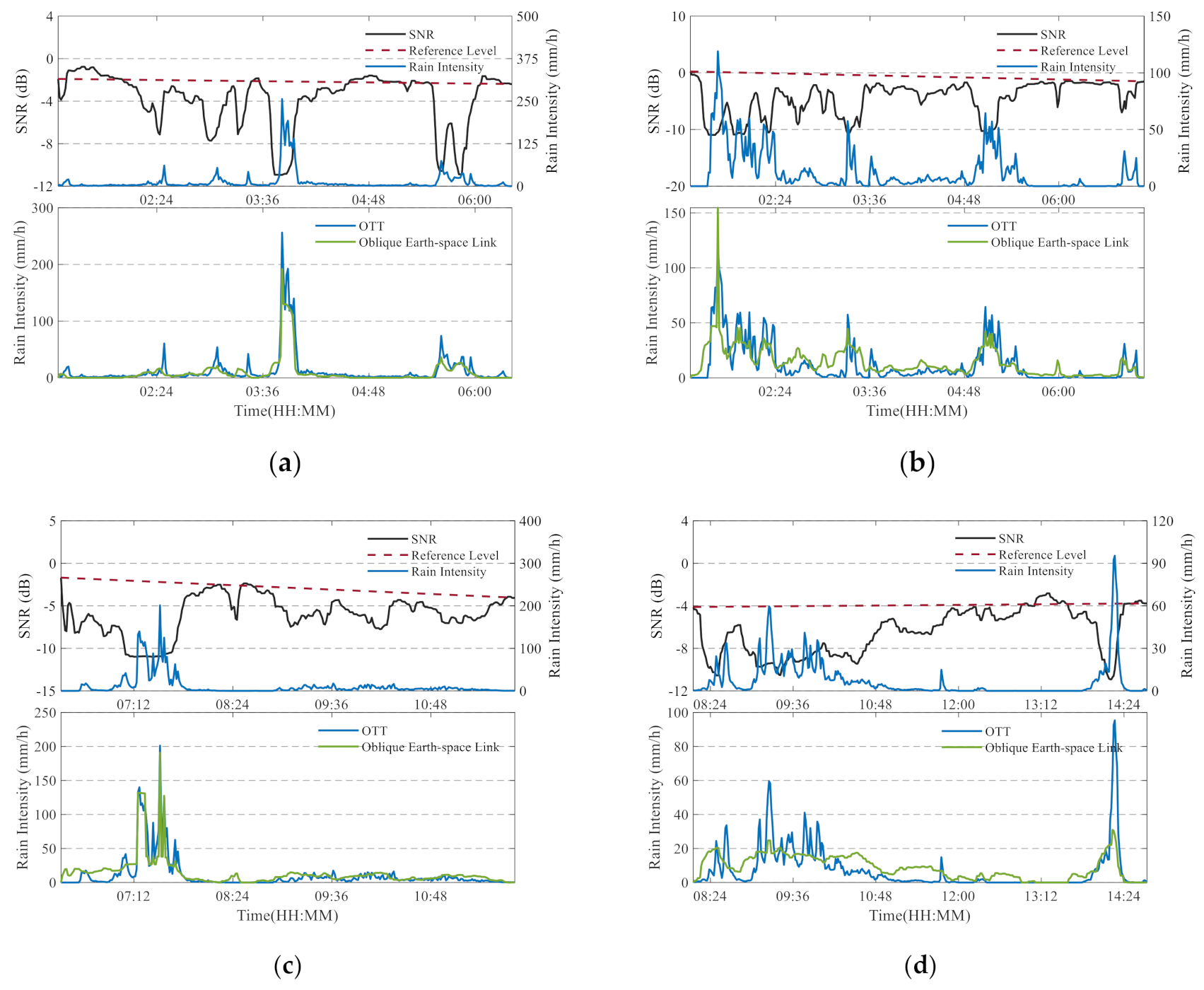
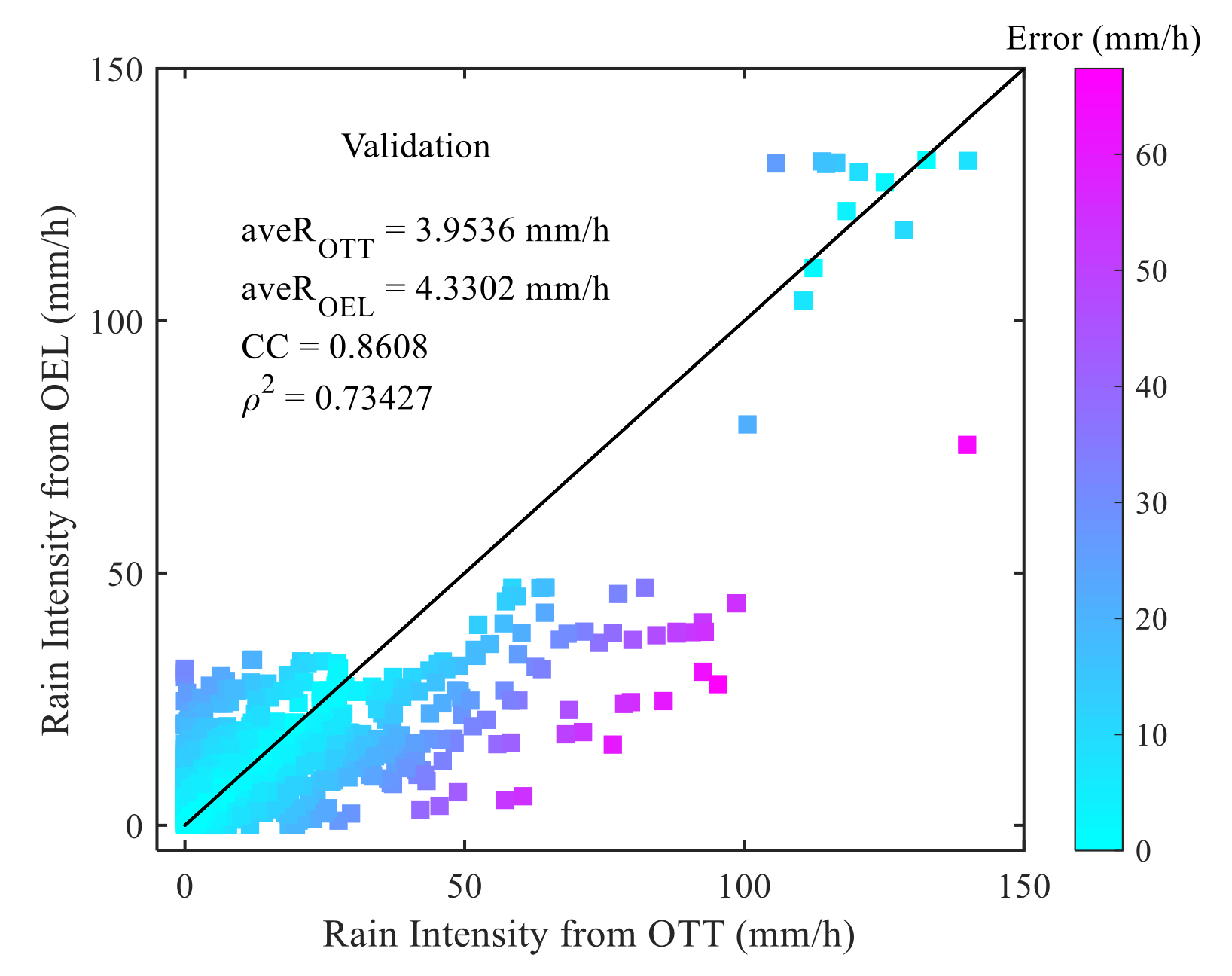
2.3. Validation of Rainfall Inversion
3. Reconstruction of Rainfall Field by OELs Network
3.1. Reconstuction Algorithm
3.2. Simulation Experiment
3.3. Performance of Rainfall Field Reconstruction
4. Nowcasting of Rainfall Field
4.1. Nowcasting of Rainfall Field Based on Deep Learning
4.2. Result of Rainfall Field Nowcasting
- (1)
- Long duration. Because the time interval of CMORPH measurements is only 30 min, a shorter duration may not reflect the detailed spatiotemporal change of rain intensity in a rainfall event. The duration of selected rainfall event exceeds 4 h which means that an event includes at least eight continuous rainfall fields.
- (2)
- Heavy rainfall intensity. The aim of this work is to achieve the nowcasting of heavy rainfall that closely relates to instantaneous natural disaster, whose intensity is higher than 10 mm/h according to the WMO Guide to Meteorological Instruments and Methods of Observation (WMO-No.8, the CIMO Guide). Therefore, the maximum rain intensity in each rainfall event is higher than 10 mm/h.
5. Discussion
5.1. The Evaluation of Rainfall Inversion from OEL
5.2. The Stability of Reconstruction Method
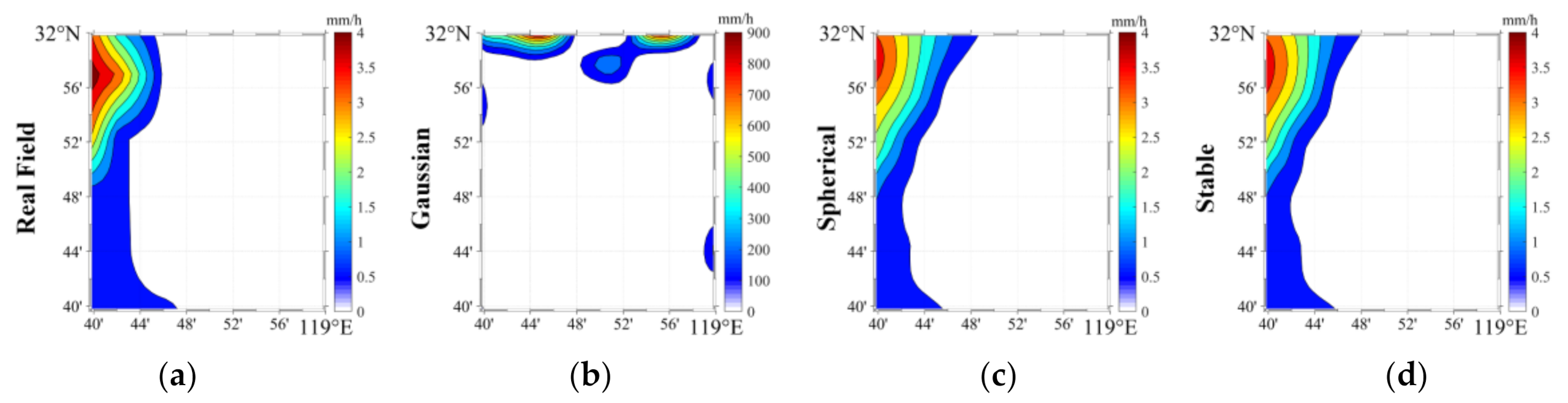
5.3. The Selection of Variogram Model
6. Conclusions
- (1)
- For the rainfall inversion by a single OEL, the results have a good agreement with OTT measurements. In terms of the extreme rainfall event from June 13 to 16, 2020, the RMSE is lower than 12 mm/h and CC is higher than 0.68. According to a year of statistical measurements, the inversion results have a reliable performance which associates with higher values of CC (0.86) and ρ2 (0.73). However, the OLE often underestimates the peak rain intensity of heavy- and extreme rainfall because its observation space is different from OTT and the height of the 0 °C isotherm is not known well.
- (2)
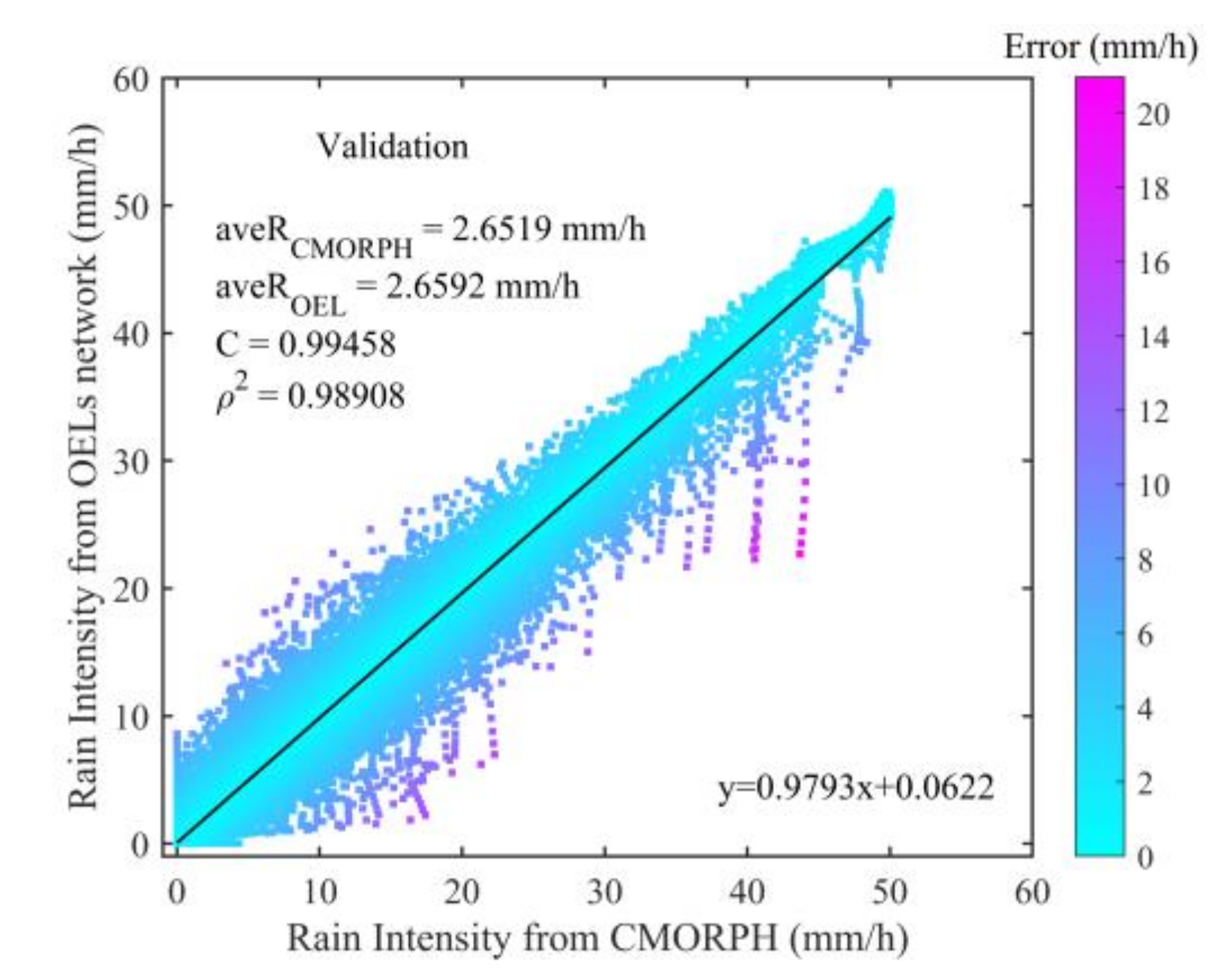
- For the reconstruction of rainfall field, inversed results are strongly correlated with the measurements from CMORPH. It can be seen from the performances of OELs network during plum rain season of 2016, 2017, 2018 and 2019 that the increasing (or decreasing) trend of accumulated rain and the position of maximum (or minimum) value are reproduced accurately. In total, the OELs network can give reliable reconstructed rainfall fields with RMSE lower than 3.46 mm/h and CC higher than 0.80.
- (3)
- For the nowcasting of rainfall field, the motion of rain cell and peak rain intensity are predicted successfully, which is of great significance for natural disaster alerts. For given two examples, the values of RMSE is lower than 3.5 mm/h and CC is higher than 0.77. It is also noted that the learning network has a poor performance on predictions for light rain events (0~2.5 mm/h) due to the lack of corresponding samples in the training set.
- (1)
- Assessing the uncertainty caused by the representativeness of OEL inversed rain intensity. In the process of rainfall field reconstruction, we assume that the path-average rain intensity is equal to the value in the middle of link. This may be not reasonable for the cases when precipitation has significant spatial heterogeneity. The sophisticated tomography reconstruction techniques, such as simultaneous algebra reconstruction technique (SART) and compressed sensing (CS), can be considered.
- (2)
- Assessing the errors introduced by the melting layer attenuation. The frequency of OEL for rainfall inversion is usually in the Ku- or Ka-band. For the signal above 10 GHz, melting layer attenuation is comparable to path-integrated rain attenuation, especially for low elevation OEL whose propagation path in melting layer is relatively long. Therefore, the issue of distinguishing melting layer attenuation from that of precipitation, needs to be addressed.
- (3)
- Assessing the variance of the variogram model. It has been shown that the estimator of semi-variance often exhibits an obvious variability and so can give estimations with large uncertainty [54]. Therefore, it is necessary to find an advanced method to reduce this effect. For example, climacogram has a better performance than conventional autocovariance and variogram, which can give more accurate results by removing the bias from estimation [55].
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Abbot, C. Precipitation Cycles. Science 1949, 110, 148. [Google Scholar] [CrossRef] [PubMed]
- Guo, B.; Zhang, J.; Meng, X.; Xu, T.; Song, Y. Long-term spatio-temporal precipitation variations in China with precipitation surface interpolated by ANUSPLIN. Sci. Rep. 2020, 10, 81. [Google Scholar] [CrossRef] [PubMed]
- Mishra, A.; Kumar, G. Climate change will affect global water availability through compounding changes in seasonal precipitation and evaporation. Nat. Commun. 2020, 11, 3044. [Google Scholar] [CrossRef]
- Alpert, P.; Rubin, Y. First Daily Mapping of Surface Moisture from Cellular Network Data and Comparison with Both Observations/ECMWF Product. Geophysical Res. Lett. 2018, 45, 8619–8628. [Google Scholar] [CrossRef]
- McCabe, M.F.; Rodell, M.; Alsdorf, D.E.; Miralles, D.G.; Uijlenhoet, R.; Wagner, W.; Lucieer, A.; Houborg, R.; Verhoest, N.E.C.; Franz, T.E.; et al. The Future of Earth Observation in Hydrology. Hydrol. Earth Syst. Sci. 2017, 21, 3879–3914. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, X.; He, B.; Zhao, S.; Hu, S.; Liu, L. Comparative measurement of rainfall with a precipitation micro-physical characteristics sensor, a 2D video disdrometer, an OTT PARSIVEL disdrometer, and a rain gauge. Atmos. Res. 2019, 229, 100–114. [Google Scholar] [CrossRef]
- Zeng, Q.; Zhang, Y.; Lei, H.; Xie, Y.; Gao, T.; Zhang, L.; Wang, C.; Huang, Y. Microphysical Characteristics of Precipitation during Pre-monsoon, Monsoon, and Post-monsoon Periods over the South China Sea. Adv. Atmos. Sci. 2019, 36, 10. [Google Scholar] [CrossRef]
- Matrosov, S.Y. Dual-frequency radar ratio of nonspherical atmospheric hydrometeors. Geophys. Res. Lett. 2005, 32, 1–4. [Google Scholar] [CrossRef] [Green Version]
- Ulbrich, C.; Lee, L. Rainfall Measurement Error by WSR-88D Radars due to Variations in Z R Law Parameters and the Radar Constant. J. Atmos. Ocean. Technol. 1999, 16, 1017–1024. [Google Scholar] [CrossRef]
- Germann, U.; Galli, G.; Boscacci, M.; Bolliger, M. Radar Precipitation Measurement in a Mountainous Region. Q. J. R. Meteorol. Soc. 2007, 132, 1669–1692. [Google Scholar] [CrossRef]
- Wagner, A.; Seltmann, J.; Kunstmann, H. Joint statistical correction of clutters, spokes and beam height for a radar derived precipitation climatology in southern Germany. Hydrol. Earth Syst. Sci. 2012, 16, 4101–4117. [Google Scholar] [CrossRef] [Green Version]
- Messer, H.; Zinevich, A.; Alpert, P. Environmental Monitoring by Wireless Communication Networks. Science 2006, 312, 713. [Google Scholar] [CrossRef] [Green Version]
- Fencl, M.; Rieckermann, J.; Schleiss, M.; Stransky, D.; Bares, V. Assessing the potential of using telecommunication microwave links in urban drainage modelling. Water Sci. Technol. 2013, 68, 1810–1818. [Google Scholar] [CrossRef] [PubMed]
- Overeem, A.; Leijnse, H.; Uijlenhoet, R. Retrieval algorithm for rainfall mapping from microwave links in a cellular communication network. Atmos. Meas. Tech. 2016, 9, 2425–2444. [Google Scholar] [CrossRef] [Green Version]
- Minda, H.; Nakamura, K. High Temporal Resolution Path-Average Rain Gauge with 50GHz Band Microwave. J. Atmos. Ocean. Technol. 2005, 22, 165–179. [Google Scholar] [CrossRef]
- Goldshtein, O.; Messer, H.; Zinevich, A. Rain Rate Estimation Using Measurements From Commercial Telecommunications Links. IEEE Trans. Signal Process. 2009, 57, 1616–1625. [Google Scholar] [CrossRef]
- Overeem, A.; Leijnse, H.; Uijlenhoet, R. Country-wide rainfall maps from cellular communication networks. Proc. Natl. Acad. Sci. USA 2013, 110, 2741–2745. [Google Scholar] [CrossRef] [Green Version]
- Han, C.; Huo, J.; Gao, Q.; Su, G.; Wang, H. Rainfall Monitoring Based on Next-Generation Millimeter-Wave Backhaul Technologies in a Dense Urban Environment. Remote Sensing 2020, 12, 1045. [Google Scholar] [CrossRef] [Green Version]
- Pu, K.; Liu, X.; Xian, M.; Gao, T. Machine Learning Classification of Rainfall Types Based on the Differential Attenuation of Multiple Frequency Microwave Links. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6888–6899. [Google Scholar] [CrossRef]
- Song, K.; Liu, X.; Gao, T.; He, B. Raindrop Size Distribution Retrieval Using Joint Dual-Frequency and Dual-Polarization Microwave Links. Adv. Meteorol. 2019, 2019, 1–11. [Google Scholar] [CrossRef]
- Rahimi, A.R.; Holt, A.R.; Upton, G.J.G.; Krämer, S.; Redder, A.; Verworn, H.-R. Attenuation Calibration of an X-Band Weather Radar Using a Microwave Link. Am. Meteorol. Soc. 2006, 23, 395–405. [Google Scholar] [CrossRef]
- Barthès, L.; Mallet, C. Rainfall measurement from the opportunistic use of an Earth–space link in the Ku band. Atmos. Meas. Tech. 2013, 6, 2181–2193. [Google Scholar] [CrossRef] [Green Version]
- Colli, M.; Stagnaro, M.; Caridi, A.; Lanza, L.G.; Randazzo, A.; Pastorino, M.; Caviglia, D.D.; Delucchi, A. A Field Assessment of a Rain Estimation System Based on Satellite-to-Earth Microwave Links. IEEE Trans. Geosci. Remote Sens. 2019, 57, 2864–2875. [Google Scholar] [CrossRef]
- Mugnai, C.; Sermi, F.; Cuccoli, F.; Facheris, L. Rainfall Estimation with a Commercial Tool for Satellite Internet in KA Band: Model Evolution and Results. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium, Milan, Italy, 26–31 July 2015; pp. 890–893. [Google Scholar] [CrossRef]
- Giannetti, F.; Moretti, M.; Reggiannini, R.; Vaccaro, A. The NEFOCAST System for Detection and Estimation of Rainfall Fields by the Opportunistic Use of Broadcast Satellite Signals. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 16–27. [Google Scholar] [CrossRef]
- Giannetti, F.; Reggiannini, R.; Moretti, M.; Adirosi, E.; Baldini, L.; Facheris, L.; Antonini, A.; Melani, S.; Bacci, G.; Petrolino, A.; et al. Real-Time Rain Rate Evaluation via Satellite Downlink Signal Attenuation Measurement. Sensors 2017, 17, 1864. [Google Scholar] [CrossRef]
- Dissanayake, A.; Allnutt, J.; Haidara, F. A prediction model that combines rain attenuation and other propagation impairments along Earth-satellite paths. IEEE Trans. Antennas Propag. 1997, 45, 1546–1588. [Google Scholar] [CrossRef]
- Xian, M.; Liu, X.; Yin, M.; Song, K.; Zhao, S.; Gao, T. Rainfall Monitoring Based on Machine Learning by Earth-space Link in the Ku Band. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 3656–3668. [Google Scholar] [CrossRef]
- SpaceX. Starlink Mission. Available online: https://www.spacex.com/webcast (accessed on 20 March 2020).
- OneWeb. OneWeb. Available online: https://www.oneweb.world/ (accessed on 31 March 2020).
- Xian, M.; Liu, X.; Yin, M.; Song, K.; Gao, T. Inversion of vertical rainfall field based on earth-space links. Acta Phys. Sin. 2020, 69, 1–11. [Google Scholar] [CrossRef]
- Huang, D.; Xu, L.; Feng, X. A hypothesis of 3D rainfall tomography using satellite signals. J. Commun. Inf. Netw. 2016, 1, 134–142. [Google Scholar] [CrossRef]
- Mishchenko, M.I.; Travis, L.D.; Lacis, A.A. Scattering, Absorption, and Emission by Small Particle; Cambridge University Press: New York, NY, USA, 2002; p. 462. [Google Scholar]
- Mishra, K.V.; Gharanjik, A.; Shankar, M.R.B.; Ottersten, B. Deep Learning Framework for Precipitation Retrievals from Communication Satellites. In Proceedings of the 10th European Conference on Radar in Meteorology & Hydrology, Ede-Wageningen, The Netherlands; 2018; pp. 1–9. [Google Scholar]
- Mercier, F.; Barthes, L.; Mallet, C. Estimation of Finescale Rainfall Fields Using Broadcast TV Satellite Links and a 4DVAR Assimilation Method. J. Atmos. Ocean. Technol. 2015, 32, 1709–1728. [Google Scholar] [CrossRef] [Green Version]
- Colli, M.; Cassola, F.; Martina, F.; Trovatore, E.; Delucchi, A.; Maggiolo, S.; Caviglia, D.D. Rainfall Fields Monitoring Based on Satellite Microwave Down-Links and Traditional Techniques in the City of Genoa. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6266–6280. [Google Scholar] [CrossRef]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.-Y.; Wong, W.-K.; Woo, W.-C. Convolutional LSTM Network: A Machine Learning Approach for Precipitation Nowcasting. arXiv 2015, arXiv:1506.04214. [Google Scholar]
- Ho, C.; Slobin, S.; Gritton, K. Atmospheric Noise Temperature Induced by Clouds and Other Weather Phenomena at SHF Band (1-45 GHz). Available online: https://descanso.jpl.nasa.gov/propagation/Ka_Band/JPL-D32584_1.pdf (accessed on 15 July 2020).
- ITU. Recommendation ITU-R P.525-4 Calculation of Free-Space Attenuation; ITU: Geneva, Switzerland, 2019. [Google Scholar]
- ITU. Recommendation ITU-R P.838-3 Specific Attenuation Model for Rain for Use in Prediction Methods; ITU: Geneva, Switzerland, 2005. [Google Scholar]
- Dowd, P. The Variogram and Kriging: Robust and Resistant Estimators; Springer: Dordrecht, The Netherlands, 1983; Volume 1. [Google Scholar]
- Webster, R.; Oliver, M.A. Geostatistics for Environmental Scientist, 2nd ed.; WILEY: Hoboken, NJ, USA, 2008; p. 330. [Google Scholar]
- Joyce, R.; Janowiak, J.; Arkin, P.; Xie, P. CMORPH: A Method That Produces Global Precipitation Estimates From Passive Microwave and Infrared Data at High Spatial and Temporal Resolution. J. Hydrometeorol. 2004, 5, 487–503. [Google Scholar] [CrossRef]
- Mahajan, M.; Jyoti, R.; Sood, K.; Bhushan, S. A Method of Generating Simultaneous Contoured and Pencil Beams From Single Shaped Reflector Antenna. IEEE Trans. Antennas Propag. 2013, 61, 5297–5301. [Google Scholar] [CrossRef]
- Warnick, K.F.; Ivashina, M.V.; Maaskant, R.; Woestenburg, B. Unified Definitions of Efficiencies and System Noise Temperature for Receiving Antenna Arrays. IEEE Trans. Antennas Propag. 2020, 58, 2121–2125. [Google Scholar] [CrossRef]
- Singh, M.S.J.; Hassan, S.I.S.; Ain, M.F.; Igarashi, K.; Tanaka, K.; Iida, M. Analysis of Tropospheric Scintillation Intensity on Earth to Space in Malaysia. Am. J. Appl. Sci. 2006, 3, 2029–2032. [Google Scholar] [CrossRef]
- ITU. Recommendation ITU-R P.679-4 Propagation Data Required for the Design of Broadcasting-Satellite Systems; ITU: Geneva, Switzerland, 2015; pp. 1–6. [Google Scholar]
- Rm, G.; Cm, T. PCM Data Reliability Monitoring Through Estimation of Signal-to-Noise Ratio. IEEE Trans. Commun. Technol. 1968, 16, 479–486. [Google Scholar] [CrossRef]
- Reimers, U. Digital video broadcasting. IEEE Commun. Mag. 1998, 36, 104–110. [Google Scholar] [CrossRef]
- ITU. Recommendation ITU-R P.530-17 Propagation Data and Prediction Methods Required for the Design of Terrestrial Line-of-Sight Systems; ITU: Geneva, Switzerland, 2017; pp. 1–57. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory(LSTM). Nerual Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Nurmi, P. Recommendations on the Verification of Local Weather Forecasts. In ECMWF Technical Memoranda; ECMWF: Shinfield Park, UK, 2003. [Google Scholar] [CrossRef]
- Koutsoyiannis, D.; Paschalis, A.; Theodoratos, N. Two-dimensional Hurst–Kolmogorov process and its application to rainfall fields. J. Hydrol. 2011, 398, 91–100. [Google Scholar] [CrossRef]
- Dimitriadis, P.; Koutsoyiannis, D. Climacogram versus autocovariance and power spectrum in stochastic modelling for Markovian and Hurst–Kolmogorov processes. Stoch. Environ. Res. Risk Assess. 2015, 29, 1649–1669. [Google Scholar] [CrossRef]
- Dimitriadis, P.; Koutsoyiannis, K.T.D.; Tyralis, H.; Kalamioti, A.; Lerias, E.; Voudouris, P. Stochastic investigation of long-term persistence in two-dimensional images of rocks. Spat. Stat. 2019, 29, 177–191. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellites | Elevation (°) | Azimuth (°) | Frequency (GHz) | α (\) | β (\) | Quantities (\) |
|---|---|---|---|---|---|---|
| ApStar7 | 31.5 | 240 | 12.55 | 0.0287 | 1.1119 | 17 |
| AsiaSat5 | 47.87 | 212 | 12.32 | 0.0267 | 1.1276 | 18 |
| ChinaSat10 | 51.75 | 195 | 12.59 | 0.0288 | 1.1216 | 16 |
| AsiaSat9 | 52.67 | 174 | 12.52 | 0.0282 | 1.1242 | 18 |
| ApStar9 | 45.17 | 141 | 11.56 | 0.0212 | 1.1523 | 24 |
| CC (/) | RMSE (mm/h) | S (/) | |||||
|---|---|---|---|---|---|---|---|
| Date | IDW | OK | IDW | OK | CMORPH 1 | IDW | OK |
| May 25 | 0.899 | 0.979 | 0.482 | 0.190 | 1.000 | 1.000 | 1.000 |
| June 29 | 0.912 | 0.979 | 0.659 | 0.281 | 0.881 | 0.958 | 0.909 |
| July 11 | 0.926 | 0.974 | 0.361 | 0.163 | 0.999 | 1.000 | 0.999 |
| August 10 | 0.962 | 0.990 | 1.529 | 0.665 | 0.984 | 0.991 | 0.985 |
| Date | Metrics | 1st | 2nd | 3rd | 4th | 5th |
|---|---|---|---|---|---|---|
| 31 May 2016 20:00–23:00 | RMSE (mm/h) | 1.252 | 1.483 | 1.692 | 1.422 | 1.241 |
| CC (\) | 0.980 | 0.960 | 0.979 | 0.969 | 0.965 | |
| 2 August 2016 10:00–13:00 | RMSE (mm/h) | 2.033 | 1.690 | 1.738 | 1.845 | 1.202 |
| CC (\) | 0.874 | 0.779 | 0.851 | 0.931 | 0.959 |
| Heavy Rainfall Prediction (\) | Heavy Rainfall Measurement (\) | ||
|---|---|---|---|
| Yes | No | Total (\) | |
| Yes | TH = 15,144 | FH = 815 | 15,959 |
| No | FN = 630 | TN = 7911 | 8541 |
| Total (\) | 15,774 | 9726 | 24,500 |
| 1 PC = (TH + TN)/(TH + FH + FN + TN) = 0.94; POD = TH/(TH + FN) = 0.96; FAR = FH/(TH + FH) = 0.051; FBI = (TH + FH)/(TH + FN) = 1.01 | |||
| CC | RMSE | Maximum (mm) | Average (mm) | |||
|---|---|---|---|---|---|---|
| Year | (\) | (mm) | CMORPH | OELs | CMORPH | OELs |
| 2016 | 0.993 | 8.321 | 860.07 | 853.46 | 785.23 | 788.89 |
| 2017 | 0.988 | 3.851 | 355.42 | 352.16 | 292.87 | 292.73 |
| 2018 | 0.988 | 3.983 | 481.72 | 474.98 | 377.59 | 377.18 |
| 2019 | 0.975 | 4.073 | 425.74 | 419.56 | 384.85 | 386.56 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xian, M.; Liu, X.; Song, K.; Gao, T. Reconstruction and Nowcasting of Rainfall Field by Oblique Earth-Space Links Network: Preliminary Results from Numerical Simulation. Remote Sens. 2020, 12, 3598. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12213598
Xian M, Liu X, Song K, Gao T. Reconstruction and Nowcasting of Rainfall Field by Oblique Earth-Space Links Network: Preliminary Results from Numerical Simulation. Remote Sensing. 2020; 12(21):3598. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12213598
Chicago/Turabian StyleXian, Minghao, Xichuan Liu, Kun Song, and Taichang Gao. 2020. "Reconstruction and Nowcasting of Rainfall Field by Oblique Earth-Space Links Network: Preliminary Results from Numerical Simulation" Remote Sensing 12, no. 21: 3598. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12213598