
A New Systematic Framework for Optimization of Multi-Temporal Terrestrial LiDAR Surveys over Complex Gully Morphology





Abstract
:
1. Introduction
- (A)
- Development of a new systematic framework for optimization of multi-temporal terrestrial LiDAR surveys;
- (B)
- Application and validation of performance of the developed systematic framework over chosen complex gully morphology;
- (C)
- Use of data collected through carried multi-temporal TLS surveys for detection of soil erosion induced STCs.
2. Materials and Methods
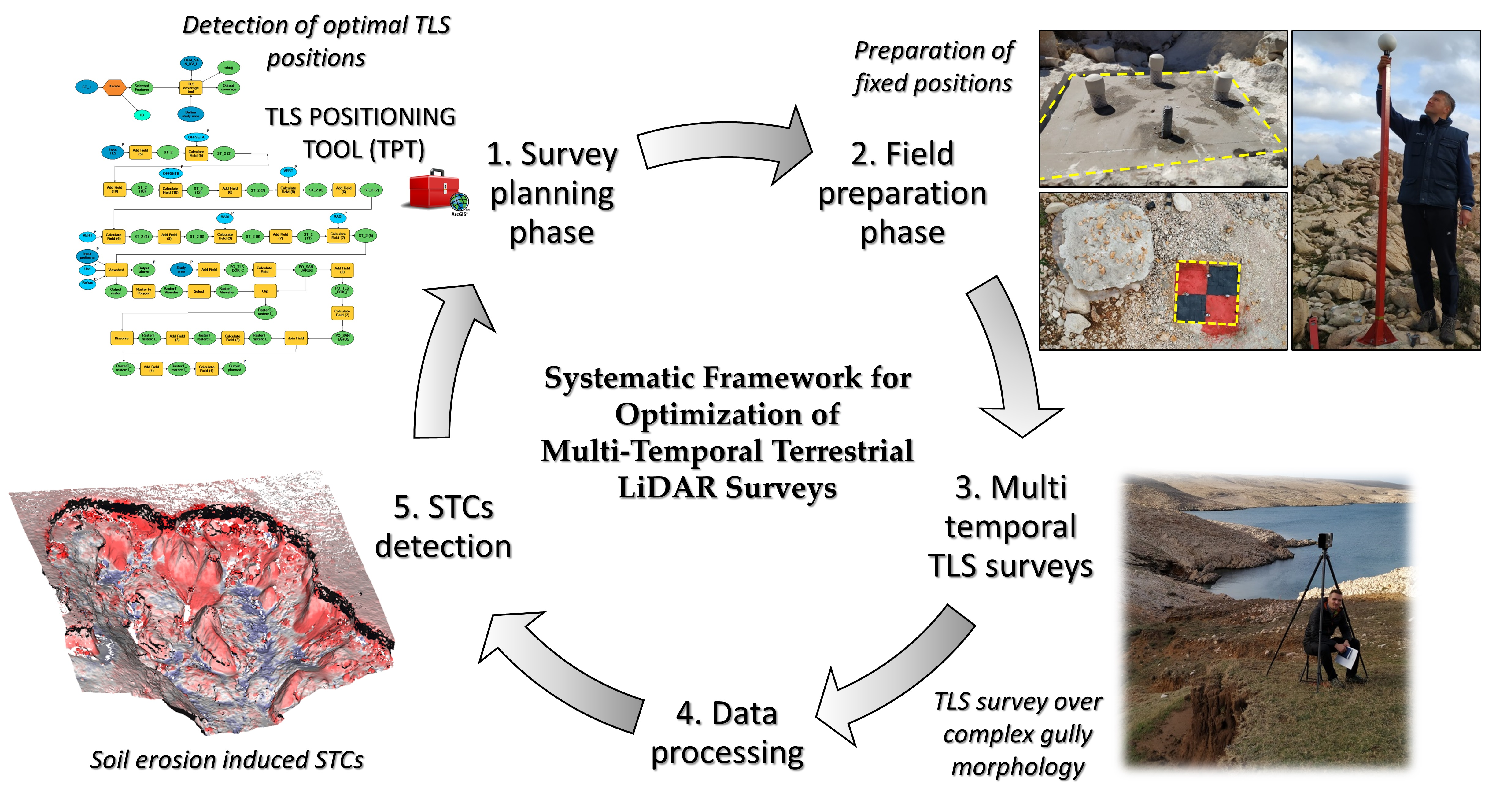
2.1. Study Area
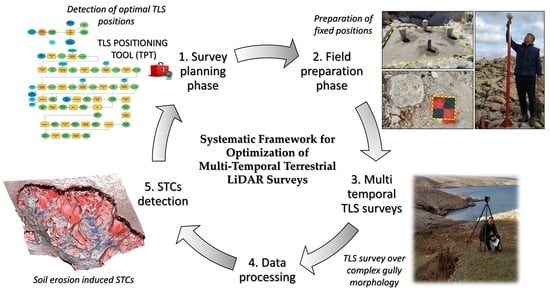
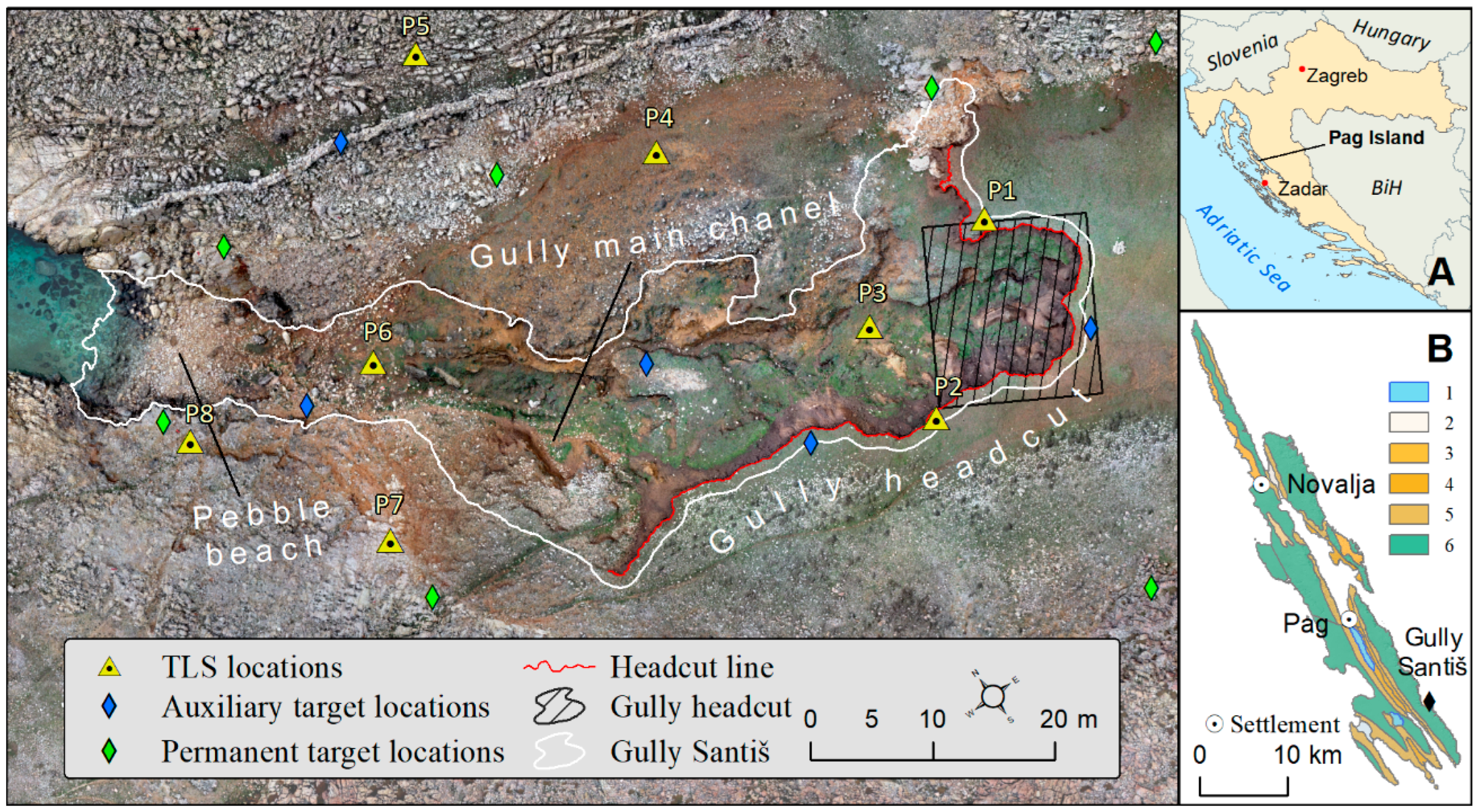
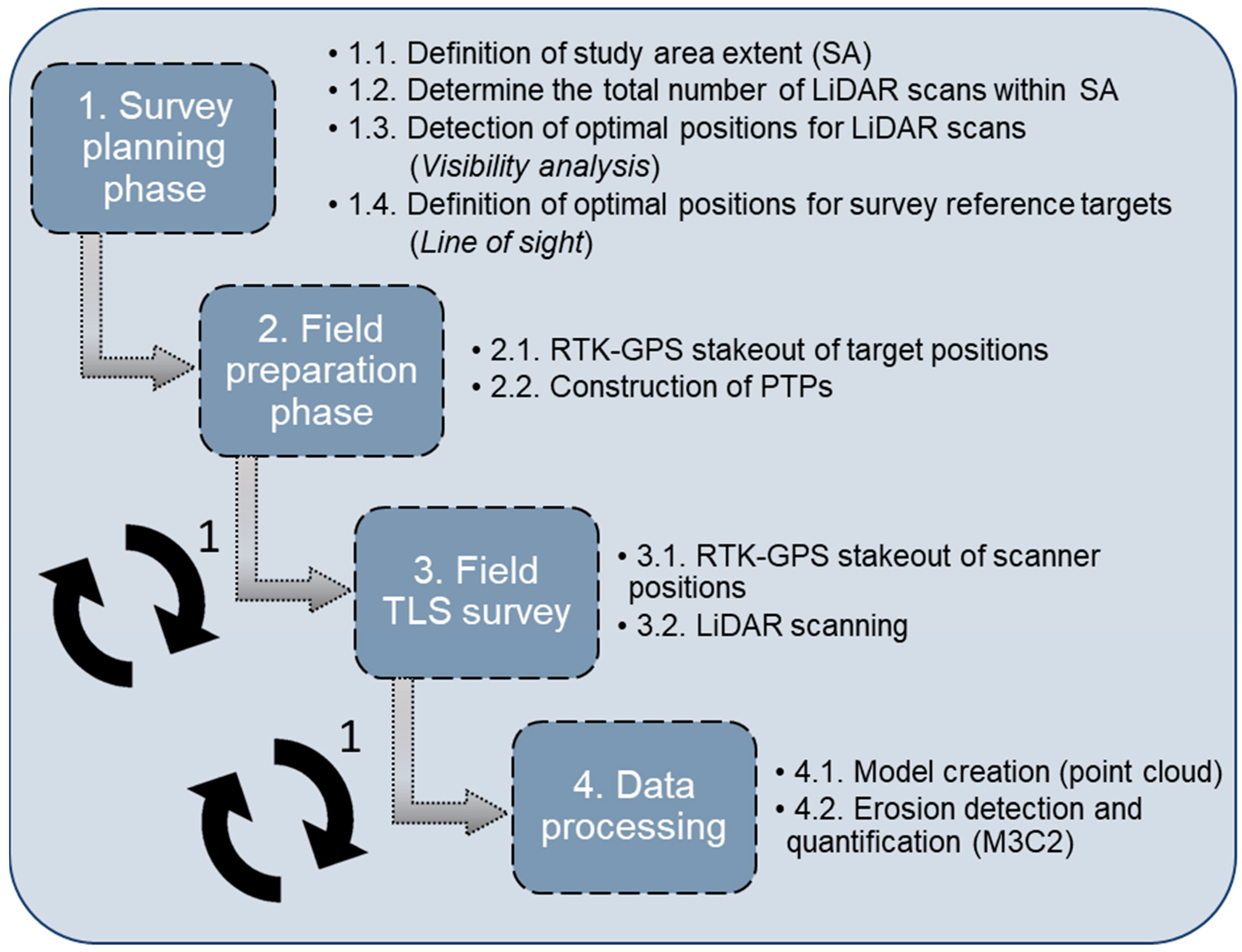
2.2. Systematic Optimization of Multi-Temporal TLS Surveys
- Survey planning phase
- 2.
- Field preparation phase
- 3.
- Multi-temporal field LiDAR surveys
- 4.
- Data processing and model creation
2.3. Validation of Performance of Developed Framework in Comparison to Non-Systematic TLS Survey Approach
2.4. Detection of Spatio-Temporal Changes within Gully Headcut
3. Results
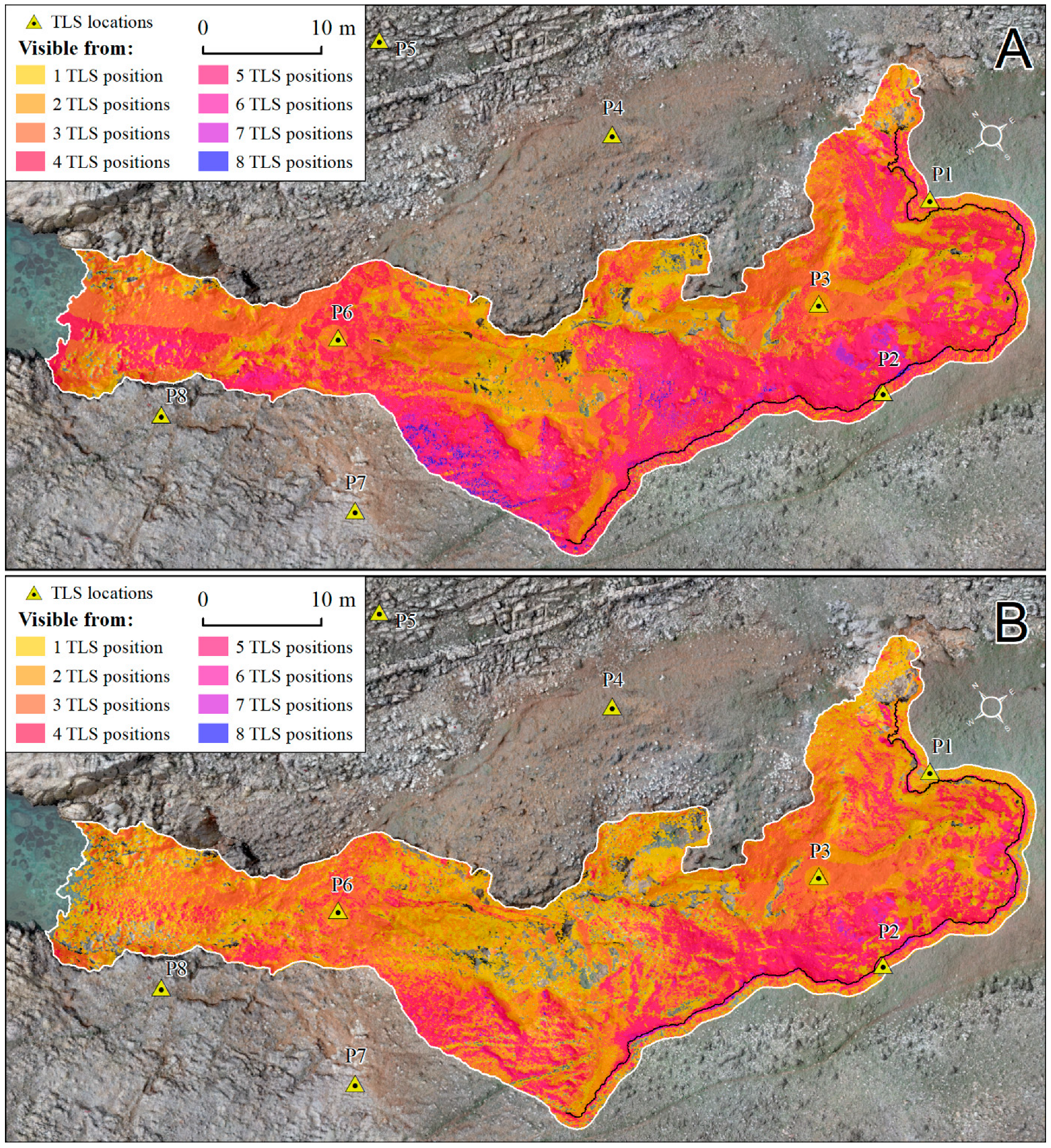
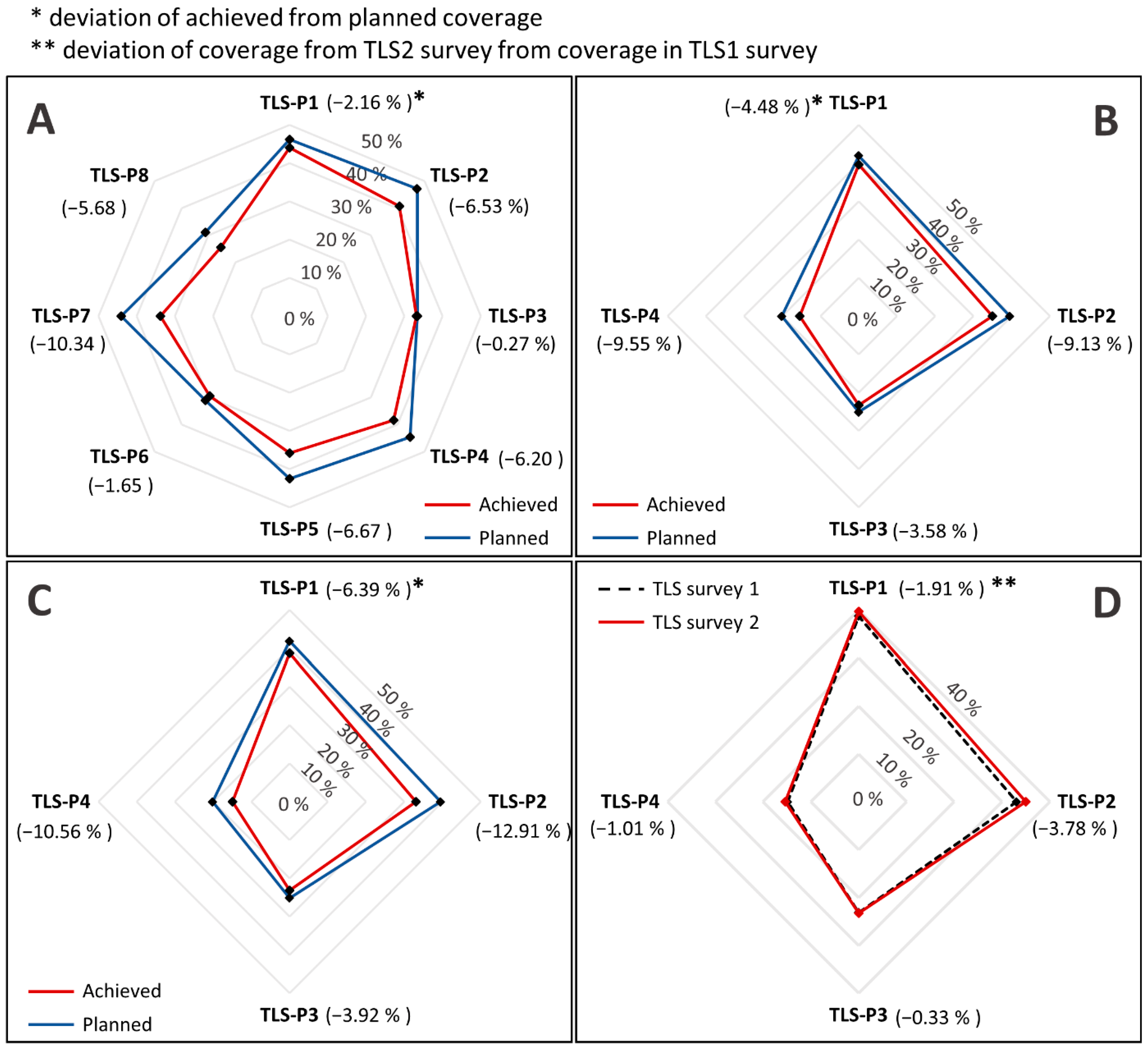
3.1. Comparison between Planned and Achieved Coverage of Study Area with Optimized TLS Surveys
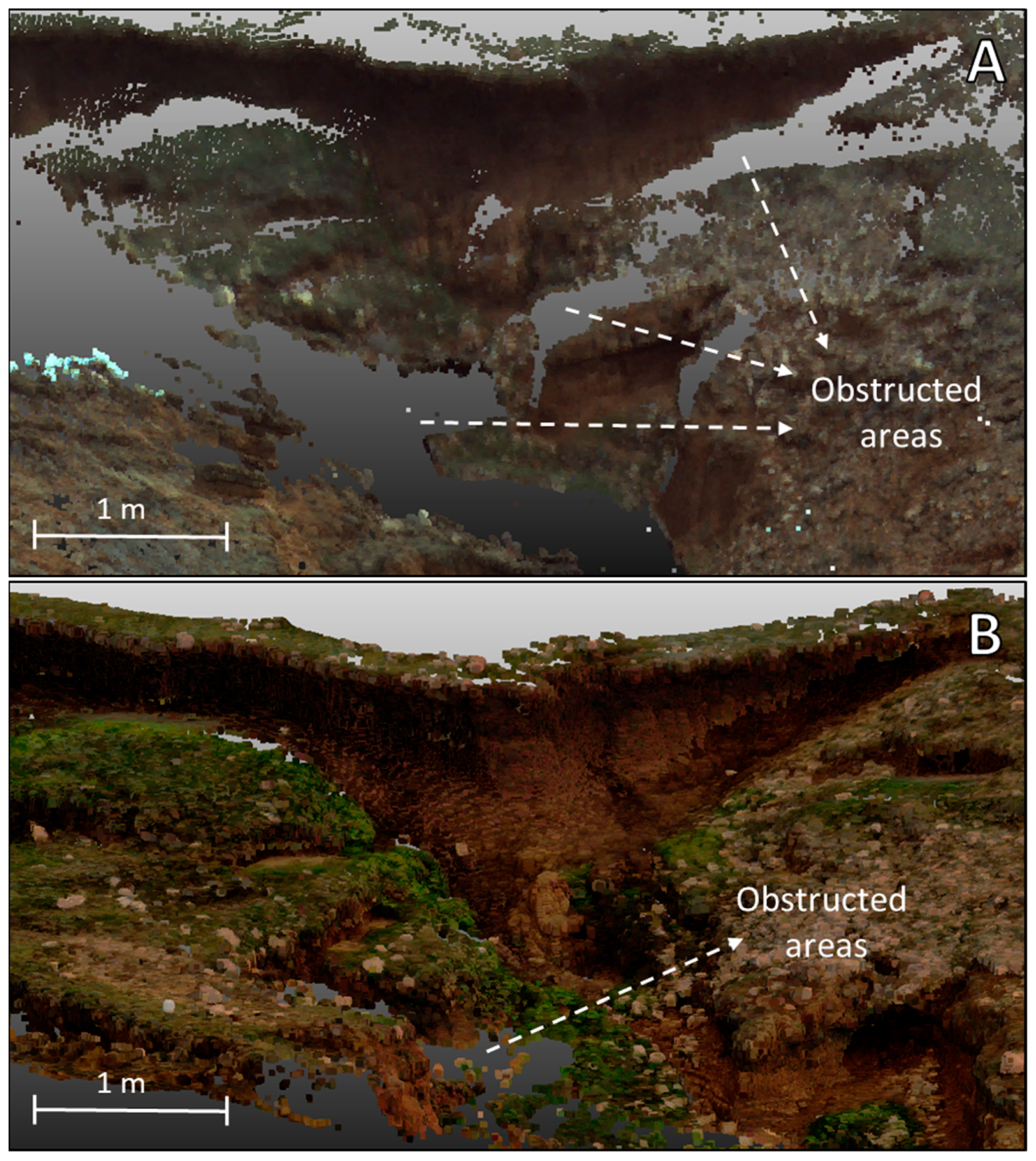
3.2. Comparison with Coverage Achieved through the Non-Systematic TLS Survey Approach
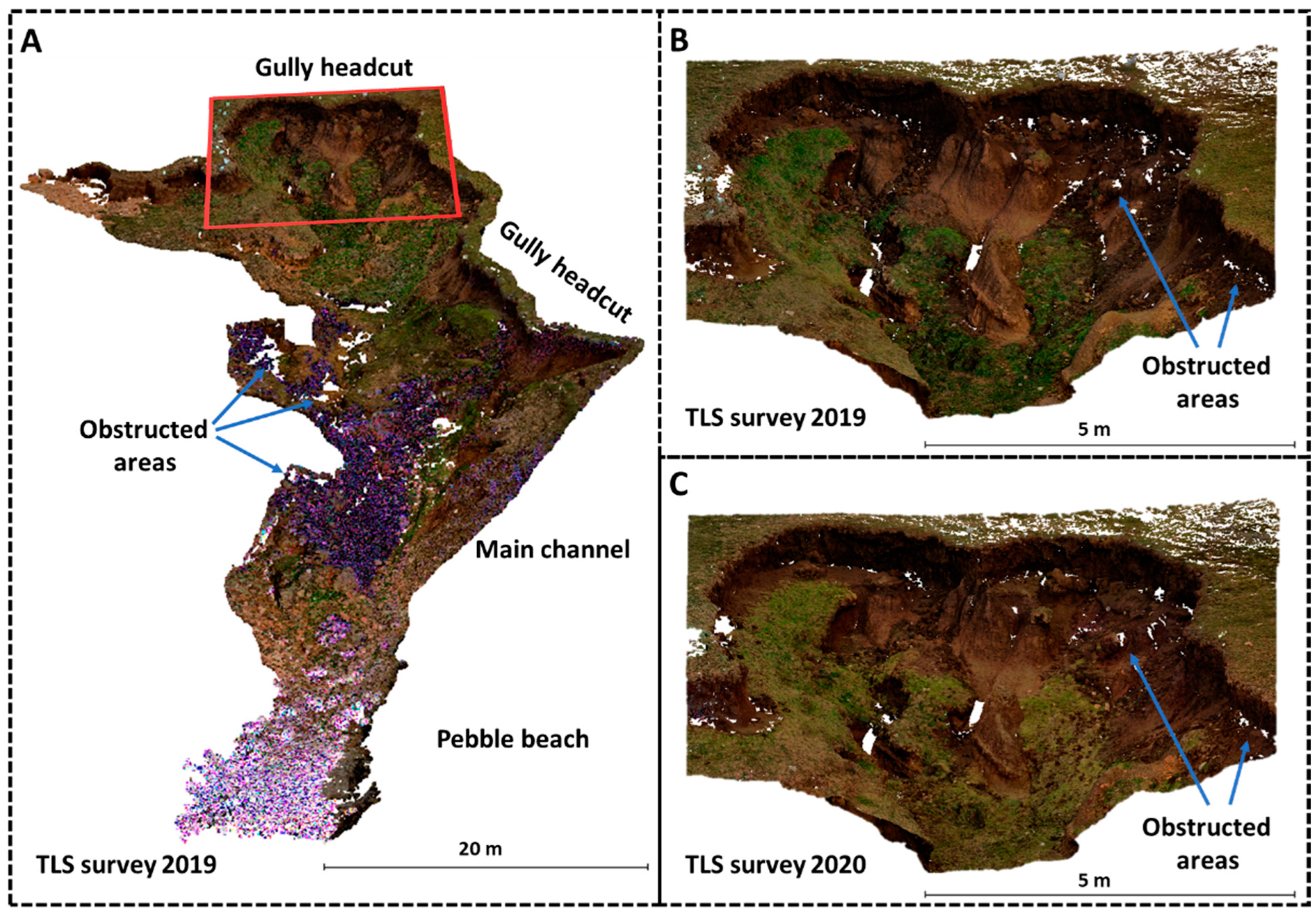
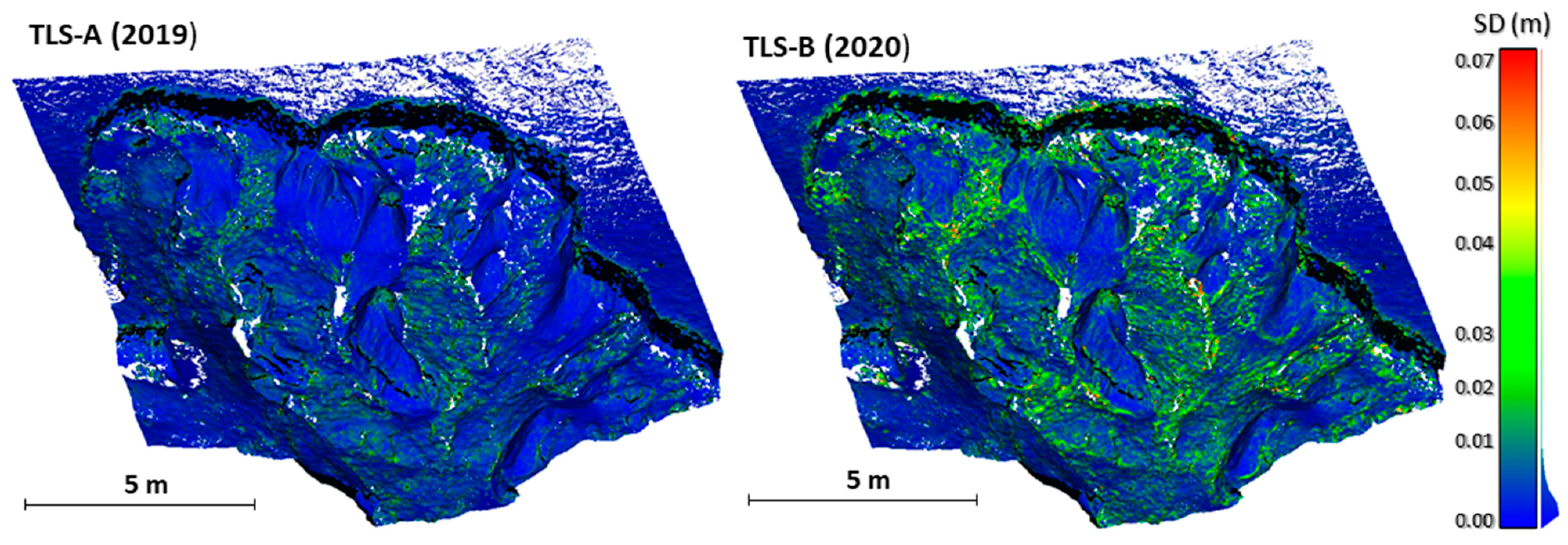
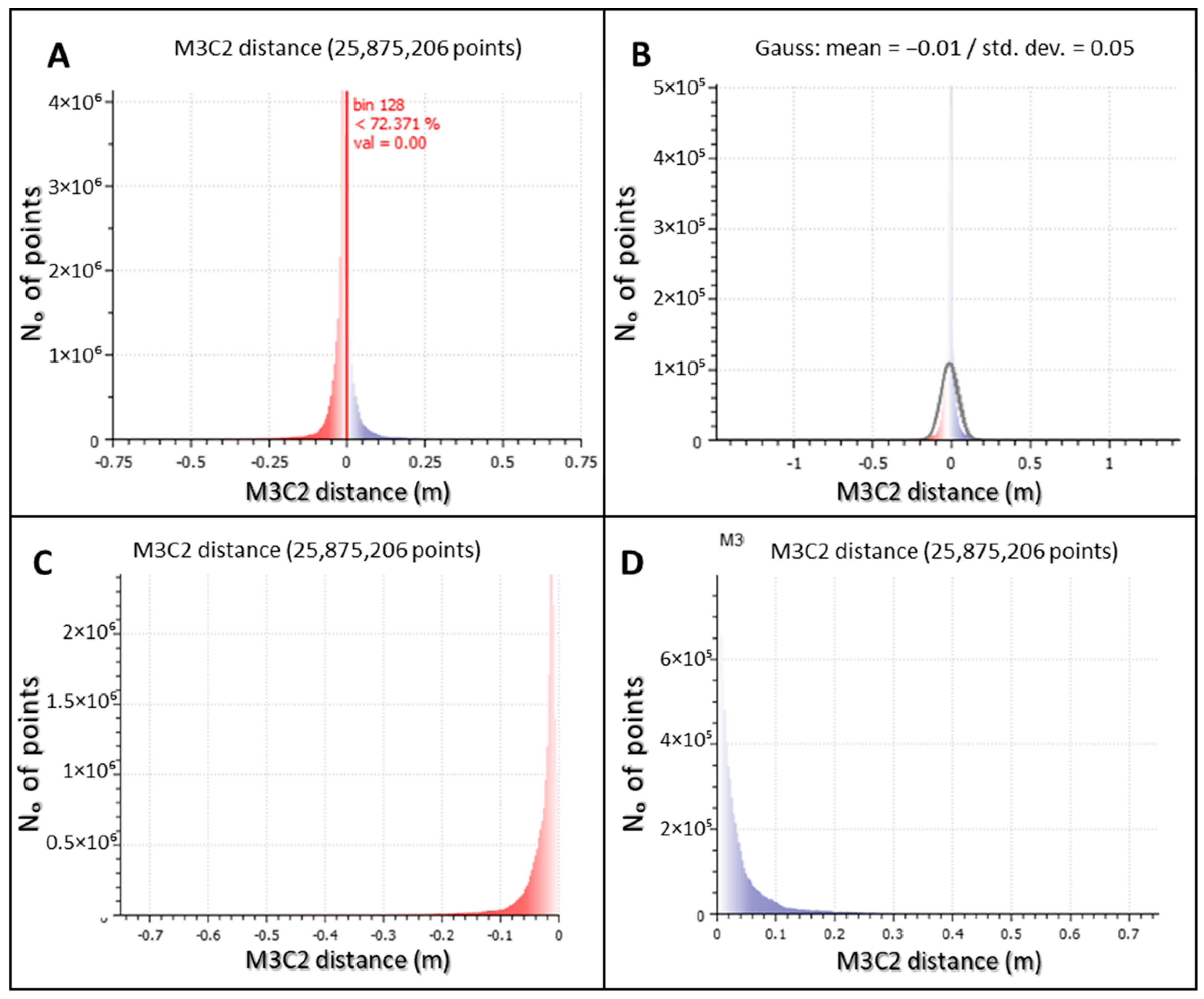
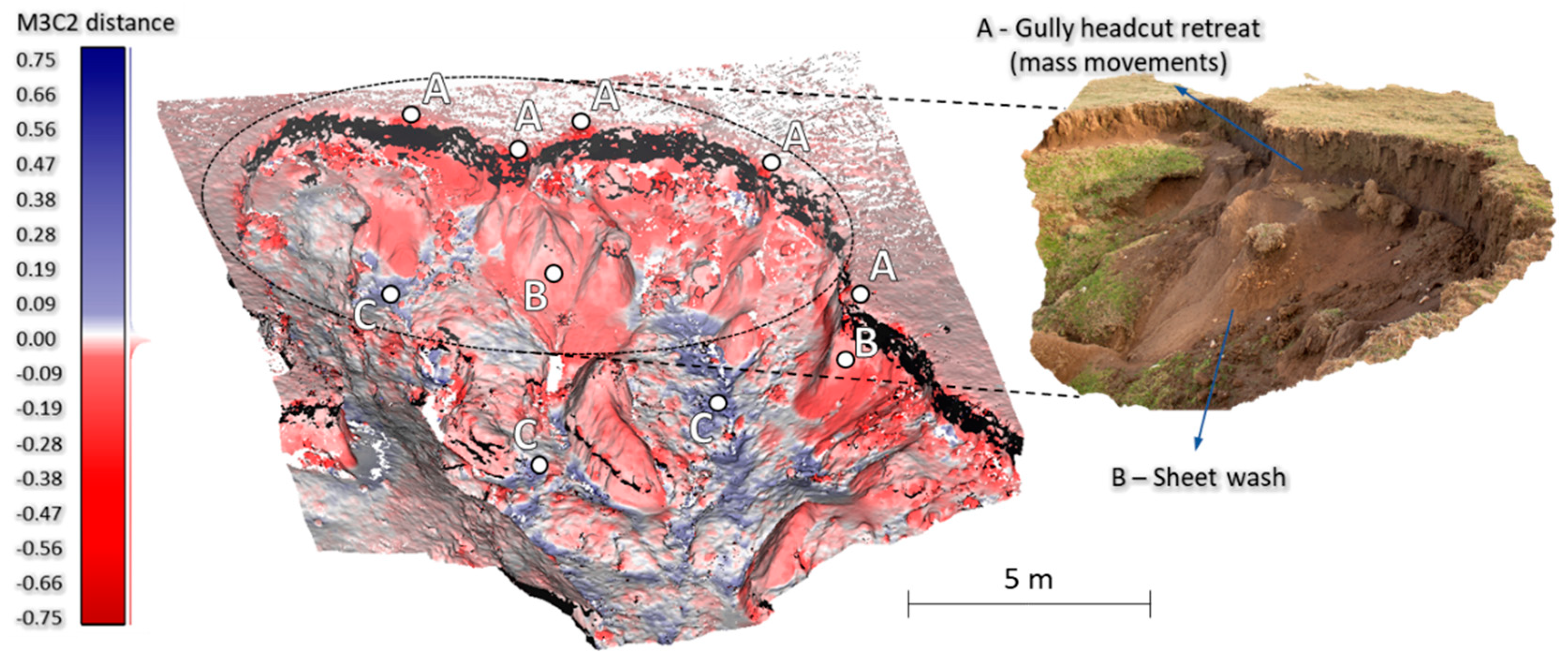
3.3. Detected Spatio-Temporal Changes within Gully Headcut (SA-2)
4. Discussion
4.1. Advantages of the Developed Framework over the Non-Systematic TLS Survey Approach
4.2. Geomorphic Implications of the Detected Erosion Induced STCs
5. Conclusions
- (1)
- The developed systematic framework significantly facilitated the implementation of multi-temporal TLS surveys over complex gully morphology. Although initially the systematic framework requires detailed planning and field preparation, later implementation of actual field TLS surveys is considerably facilitated.
- (2)
- Deviation of achieved coverage of multi-temporal TLS surveys from planned coverage was minimal within both the whole gully and the chosen part of the complex gully headcut, thus confirming the accuracy of the created survey plan and achieved repeatability of multi-temporal surveys.
- (3)
- A small increase in achieved deviation between planned coverage and achieved coverage was noticed between the two carried out surveys, which could be related to the rapid erosion induced STCs.
- (4)
- Most intense erosion induced STCs were detected within a one-year observed period within the gully headcut, where mass wasting resulted in the gradual uphill retreat of the headcut.
- (5)
- The developed systematic framework is applicable to all studies that require multi-temporal TLS surveys for monitoring of STCs over complex geomorphic features.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Neugirg, F.; Stark, M.; Kaiser, A.; Vlacilova, M.; Della Seta, M.; Vergari, F.; Schmidt, J.; Becht, M.; Haas, F. Erosion processes in calanchi in the Upper Orcia Valley, Southern Tuscany, Italy based on multitemporal high-resolution terrestrial LiDAR and UAV surveys. Geomorphology 2016, 269, 8–22. [Google Scholar] [CrossRef]
- Telling, J.; Lyda, A.; Hartzell, P.; Glennie, C. Review of Earth science research using terrestrial laser scanning. Earth-Sci. Rev. 2017, 169, 35–68. [Google Scholar] [CrossRef] [Green Version]
- Zahs, V.; Hämmerle, M.; Anders, K.; Hecht, S.; Sailer, R.; Rutzinger, M.; Williams, J.G.; Höfle, B. Multi-temporal 3D point cloud-based quantification and analysis of geomorphological activity at an alpine rock glacier using airborne and terrestrial LiDAR. Permafr. Periglac. Processes 2019, 30, 222–238. [Google Scholar] [CrossRef]
- De Oliveira, C.M.M.; Francelino, M.R.; de Mendonça, B.A.F.; Ramos, I.Q. Obtaining morphometric variables from gullies using two methods of interpolation laser scanner data: The case study of Vassouras, Brazil. J. Mt. Sci. 2020, 17, 3012–3023. [Google Scholar] [CrossRef]
- Błaszczyk, M.; Laska, M.; Sivertsen, A.; Jawak, S.D. Combined use of aerial photogrammetry and terrestrial laser scanning for detecting geomorphological changes in Hornsund, Svalbard. Remote Sens. 2022, 14, 601. [Google Scholar] [CrossRef]
- Su, Y.T.; Bethel, J.; Hu, S. Octree-based segmentation for terrestrial LiDAR point cloud data in industrial applications. ISPRS J. Photogramm. Remote Sens. 2016, 113, 59–74. [Google Scholar] [CrossRef]
- Li, P.; Hao, M.; Hu, J.; Gao, C.; Zhao, G.; Chan, F.; Gao, J.; Dang, T.; Mu, X. Spatiotemporal Patterns of Hillslope Erosion Investigated Based on Field Scouring Experiments and Terrestrial Laser Scanning. Remote Sens. 2021, 13, 1674. [Google Scholar] [CrossRef]
- Gao, C.; Li, P.; Hu, J.; Yan, L.; Latifi, H.; Yao, W.; Hao, M.; Gao, J.; Dang, T.; Zhang, S. Development of gully erosion processes: A 3D investigation based on field scouring experiments and laser scanning. Remote Sens. Environ. 2021, 265, 112683. [Google Scholar] [CrossRef]
- Kromer, R.A.; Abellán, A.; Hutchinson, D.J.; Lato, M.; Chanut, M.A.; Dubois, L.; Jaboyedoff, M. Automated terrestrial laser scanning with near-real-time change detection–monitoring of the Séchilienne landslide. Earth Surf. Dyn. 2017, 5, 293–310. [Google Scholar] [CrossRef] [Green Version]
- Jiang, N.; Li, H.; Hu, Y.; Zhang, J.; Dai, W.; Li, C.; Zhou, J.W. A Monitoring Method Integrating Terrestrial Laser Scanning and Unmanned Aerial Vehicles for Different Landslide Deformation Patterns. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 10242–10255. [Google Scholar] [CrossRef]
- Van Veen, M.; Hutchinson, D.J.; Kromer, R.; Lato, M.; Edwards, T. Effects of sampling interval on the frequency-magnitude relationship of rockfalls detected from terrestrial laser scanning using semi-automated methods. Landslides 2017, 14, 1579–1592. [Google Scholar] [CrossRef]
- DiFrancesco, P.M.; Bonneau, D.; Hutchinson, D.J. The implications of M3C2 projection diameter on 3D semi-automated rockfall extraction from sequential terrestrial laser scanning point clouds. Remote Sens. 2020, 12, 1885. [Google Scholar] [CrossRef]
- Fischer, M.; Huss, M.; Kummert, M.; Hoelzle, M. Application and validation of long-range terrestrial laser scanning to monitor the mass balance of very small glaciers in the Swiss Alps. Cryosphere 2016, 10, 1279–1295. [Google Scholar] [CrossRef] [Green Version]
- Fugazza, D.; Scaioni, M.; Corti, M.; D’Agata, C.; Azzoni, R.S.; Cernuschi, M.; Smiraglia, C.; Diolaiuti, G.A. Combination of UAV and terrestrial photogrammetry to assess rapid glacier evolution and map glacier hazards. Nat. Hazards Earth Syst. Sci. 2018, 18, 1055–1071. [Google Scholar] [CrossRef] [Green Version]
- Kociuba, W.; Gajek, G.; Franczak, Ł. A Short-Time Repeat TLS Survey to Estimate Rates of Glacier Retreat and Patterns of Forefield Development (Case Study: Scottbreen, SW Svalbard). Resources 2020, 10, 2. [Google Scholar] [CrossRef]
- Westoby, M.J.; Lim, M.; Hogg, M.; Pound, M.J.; Dunlop, L.; Woodward, J. Cost-effective erosion monitoring of coastal cliffs. Coast. Eng. 2018, 138, 152–164. [Google Scholar] [CrossRef]
- Hilgendorf, Z.; Marvin, M.C.; Turner, C.M.; Walker, I.J. Assessing geomorphic change in restored coastal dune ecosystems using a multi-platform aerial approach. Remote Sens. 2021, 13, 354. [Google Scholar] [CrossRef]
- Mavroulis, S.; Vassilakis, E.; Diakakis, M.; Konsolaki, A.; Kaviris, G.; Kotsi, E.; Kapetanidis, V.; Sakkas, V.; Alexopoulos, J.D.; Lekkas, E.; et al. The Use of Innovative Techniques for Management of High-Risk Coastal Areas, Mitigation of Earthquake-Triggered Landslide Risk and Responsible Coastal Development. Appl. Sci. 2022, 12, 2193. [Google Scholar] [CrossRef]
- Jones, L.K.; Kyle, P.R.; Oppenheimer, C.; Frechette, J.D.; Okal, M.H. Terrestrial laser scanning observations of geomorphic changes and varying lava lake levels at Erebus volcano, Antarctica. J. Volcanol. Geotherm. Res. 2015, 295, 43–54. [Google Scholar] [CrossRef] [Green Version]
- De Zeeuw-van Dalfsen, E.; Richter, N.; González, G.; Walter, T.R. Geomorphology and structural development of the nested summit crater of Láscar Volcano studied with Terrestrial Laser Scanner data and analogue modelling. J. Volcanol. Geotherm. Res. 2017, 329, 1–12. [Google Scholar] [CrossRef]
- Santagata, T. Monitoring of the Nirano Mud Volcanoes Regional Natural Reserve (North Italy) using unmanned aerial vehicles and terrestrial laser scanning. J. Imaging 2017, 3, 42. [Google Scholar] [CrossRef] [Green Version]
- Eltner, A.; Mulsow, C.; Maas, H.G. Quantitative measurement of soil erosion from TLS and UAV data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 40, 4–6. [Google Scholar] [CrossRef] [Green Version]
- Vinci, A.; Brigante, R.; Todisco, F.; Mannocchi, F.; Radicioni, F. Measuring rill erosion by laser scanning. Catena 2015, 124, 97–108. [Google Scholar] [CrossRef]
- Sun, L.; Wu, S.; Zhang, B.; Lei, Q. Development of rill erosion and its simulation with cellular automata-rill model in Chinese Loess Plateau. Arch. Agron. Soil Sci. 2021, 68, 823–837. [Google Scholar] [CrossRef]
- Li, Y.; Lu, X.; Washington-Allen, R.A.; Li, Y. Microtopographic Controls on Erosion and Deposition of a Rilled Hillslope in Eastern Tennessee, USA. Remote Sens. 2022, 14, 1315. [Google Scholar] [CrossRef]
- Perroy, R.L.; Bookhagen, B.; Asner, G.P.; Chadwick, O.A. Comparison of gully erosion estimates using airborne and ground-based LiDAR on Santa Cruz Island, California. Geomorphology 2010, 118, 288–300. [Google Scholar] [CrossRef]
- Rengers, F.K.; Tucker, G.E. The evolution of gully headcut morphology: A case study using terrestrial laser scanning and hydrological monitoring. Earth Surf. Processes Landf. 2015, 40, 1304–1317. [Google Scholar] [CrossRef]
- Goodwin, N.R.; Armston, J.; Stiller, I.; Muir, J. Assessing the repeatability of terrestrial laser scanning for monitoring gully topography: A case study from Aratula, Queensland, Australia. Geomorphology 2016, 262, 24–36. [Google Scholar] [CrossRef]
- Goodwin, N.R.; Armston, J.D.; Muir, J.; Stiller, I. Monitoring gully change: A comparison of airborne and terrestrial laser scanning using a case study from Aratula, Queensland. Geomorphology 2017, 282, 195–208. [Google Scholar] [CrossRef]
- Castillo, C.; Pérez, R.; James, M.R.; Quinton, J.N.; Taguas, E.V.; Gómez, J.A. Comparing the accuracy of several field methods for measuring gully erosion. Soil Sci. Soc. Am. J. 2012, 76, 1319–1332. [Google Scholar] [CrossRef] [Green Version]
- Taylor, R.J.; Massey, C.; Fuller, I.C.; Marden, M.; Archibald, G.; Ries, W. Quantifying sediment connectivity in an actively eroding gully complex, Waipaoa catchment, New Zealand. Geomorphology 2018, 307, 24–37. [Google Scholar] [CrossRef]
- Vericat, D.; Smith, M.W.; Brasington, J. Patterns of topographic change in sub-humid badlands determined by high resolution multi-temporal topographic surveys. Catena 2014, 120, 164–176. [Google Scholar] [CrossRef]
- Marsico, A.; De Santis, V.; Capolongo, D. Erosion Rate of the Aliano Biancana Badlands Based on a 3D Multi-Temporal High-Resolution Survey and Implications for Wind-Driven Rain. Land 2021, 10, 828. [Google Scholar] [CrossRef]
- Camera, C.; Djuma, H.; Bruggeman, A.; Zoumides, C.; Eliades, M.; Charalambous, K.; Abate, D.; Faka, M. Quantifying the effectiveness of mountain terraces on soil erosion protection with sediment traps and dry-stone wall laser scans. Catena 2018, 171, 251–264. [Google Scholar] [CrossRef]
- Meinen, B.U.; Robinson, D.T. Where did the soil go? Quantifying one year of soil erosion on a steep tile-drained agricultural field. Sci. Total Environ. 2020, 729, 138320. [Google Scholar] [CrossRef]
- Neugirg, F.; Kaiser, A.; Huber, A.; Heckmann, T.; Schindewolf, M.; Schmidt, J.; Becht, M.; Haas, F. Using terrestrial LiDAR data to analyse morphodynamics on steep unvegetated slopes driven by different geomorphic processes. Catena 2016, 142, 269–280. [Google Scholar] [CrossRef]
- Kasperski, J.; Delacourt, C.; Allemand, P.; Potherat, P.; Jaud, M.; Varrel, E. Application of a terrestrial laser scanner (TLS) to the study of the Séchilienne Landslide (Isère, France). Remote Sens. 2010, 2, 2785–2802. [Google Scholar] [CrossRef] [Green Version]
- Bremer, M.; Sass, O. Combining airborne and terrestrial laser scanning for quantifying erosion and deposition by a debris flow event. Geomorphology 2012, 138, 49–60. [Google Scholar] [CrossRef]
- Alexiou, S.; Deligiannakis, G.; Pallikarakis, A.; Papanikolaou, I.; Psomiadis, E.; Reicherter, K. Comparing high accuracy t-LiDAR and UAV-SfM derived point clouds for geomorphological change detection. ISPRS Int. J. Geo-Inf. 2021, 10, 367. [Google Scholar] [CrossRef]
- Li, Y.; McNelis, J.J.; Washington-Allen, R.A. Quantifying Short-Term Erosion and Deposition in an Active Gully Using Terrestrial Laser Scanning: A Case Study from West Tennessee, USA. Front. Earth Sci. 2020, 8, 481. [Google Scholar] [CrossRef]
- Gómez-Gutiérrez, Á.; Biggs, T.; Gudino-Elizondo, N.; Errea, P.; Alonso-González, E.; Nadal Romero, E.; de Sanjosé Blasco, J.J. Using visibility analysis to improve point density and processing time of SfM-MVS techniques for 3D reconstruction of landforms. Earth Surf. Processes Landf. 2020, 45, 2524–2539. [Google Scholar] [CrossRef]
- Lončar, N. Geomorphologic regionalization of the central and southern parts of Pag Island. Geoadria 2009, 14, 5–25. [Google Scholar] [CrossRef]
- Šiljeg, A.; Domazetović, F.; Marić, I.; Lončar, N.; Panđa, L. New method for automated quantification of vertical spatio-temporal changes within gully cross-sections based on very-high-resolution models. Remote Sens. 2021, 13, 321. [Google Scholar] [CrossRef]
- Domazetović, F.; Šiljeg, A.; Lončar, N.; Marić, I. Development of automated multicriteria GIS analysis of gully erosion susceptibility. Appl. Geogr. 2019, 112, 102083. [Google Scholar] [CrossRef]
- Carr, S.; Douglas, B.; Phillips, D. Terrestrial Laser Scanning (TLS) Field Camp Manual; UNAVCO: Boulder, CO, USA, 2013. [Google Scholar]
- Faro. Technical Specification Sheet for the Focus Laser Scanner. 2022. Available online: https://knowledge.faro.com/Hardware/3D_Scanners/Focus/Technical_Specification_Sheet_for_the_Focus_Laser_Scanner (accessed on 25 April 2022).
- ESRI. Using Viewshed and Observer Points for Visibility Analysis. 2022. Available online: https://pro.arcgis.com/en/pro-app/2.8/tool-reference/3d-analyst/using-viewshed-and-observer-points-for-visibility.htm (accessed on 30 April 2022).
- Wu, H.; Pan, M.; Yao, L.; Luo, B. A partition-based serial algorithm for generating viewshed on massive DEMs. Int. J. Geogr. Inf. Sci. 2007, 21, 955–964. [Google Scholar] [CrossRef]
- Lee, S.B.; Ryu, J.R.; Choo, S.Y.; Woo, S.H.; Seo, J.H.; Jo, J.S. A Study on Viewshed Frequency Analysis for Establishing Viewpoints. In Proceedings of the FUTURE CITIES 28th eCAADe Conference Proceedings, Zurich, Switzerland, 15–18 September 2010. [Google Scholar]
- Cook, K.L. An evaluation of the effectiveness of low-cost UAVs and structure from motion for geomorphic change detection. Geomorphology 2017, 278, 195–208. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; Smith, M.W. 3-D uncertainty-based topographic change detection with structure-from-motion photogrammetry: Precision maps for ground control and directly georeferenced surveys. Earth Surf. Processes Landf. 2017, 42, 1769–1788. [Google Scholar] [CrossRef]
- Cândido, B.M.; James, M.; Quinton, J.; Lima, W.D.; Silva, M.L.N. Sediment source and volume of soil erosion in a gully system using UAV photogrammetry. Rev. Bras. De Ciência Do Solo 2020, 44, 1–14. [Google Scholar] [CrossRef]
- Bailey, G.; Li, Y.; McKinney, N.; Yoder, D.; Wright, W.; Washington-Allen, R. Las2DoD: Change Detection Based on Digital Elevation Models Derived from Dense Point Clouds with Spatially Varied Uncertainty. Remote Sens. 2022, 14, 1537. [Google Scholar] [CrossRef]
- Williams, J.G.; Anders, K.; Winiwarter, L.; Zahs, V.; Höfle, B. Multi-directional change detection between point clouds. ISPRS J. Photogramm. Remote Sens. 2021, 172, 95–113. [Google Scholar] [CrossRef]
- Winiwarter, L.; Anders, K.; Höfle, B. M3C2-EP: Pushing the limits of 3D topographic point cloud change detection by error propagation. ISPRS J. Photogramm. Remote Sens. 2021, 178, 240–258. [Google Scholar] [CrossRef]
- Zahs, V.; Winiwarter, L.; Anders, K.; Williams, J.G.; Rutzinger, M.; Höfle, B. Correspondence-driven plane-based M3C2 for lower uncertainty in 3D topographic change quantification. ISPRS J. Photogramm. Remote Sens. 2022, 183, 541–559. [Google Scholar] [CrossRef]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (NZ). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef] [Green Version]
- Barnhart, T.B.; Crosby, B.T. Comparing two methods of surface change detection on an evolving thermokarst using high-temporal-frequency terrestrial laser scanning, Selawik River, Alaska. Remote Sens. 2013, 5, 2813–2837. [Google Scholar] [CrossRef] [Green Version]
- Gomez-Gutierrez, A.; Schnabel, S.; Berenguer-Sempere, F.; Lavado-Contador, F.; Rubio-Delgado, J. Using 3D photo-reconstruction methods to estimate gully headcut erosion. Catena 2014, 120, 91–101. [Google Scholar] [CrossRef]
- Gómez-Gutiérrez, Á.; Gonçalves, G.R. Surveying coastal cliffs using two UAV platforms (multirotor and fixed-wing) and three different approaches for the estimation of volumetric changes. Int. J. Remote Sens. 2020, 41, 8143–8175. [Google Scholar] [CrossRef]
- Kromer, R.A.; Abellán, A.; Hutchinson, D.J.; Lato, M.; Edwards, T.; Jaboyedoff, M. A 4D filtering and calibration technique for small-scale point cloud change detection with a terrestrial laser scanner. Remote Sens. 2015, 7, 13029–13052. [Google Scholar] [CrossRef] [Green Version]
- Duffy, J.P.; Shutler, J.D.; Witt, M.J.; DeBell, L.; Anderson, K. Tracking fine-scale structural changes in coastal dune morphology using kite aerial photography and uncertainty-assessed structure-from-motion photogrammetry. Remote Sens. 2018, 10, 1494. [Google Scholar] [CrossRef] [Green Version]
- Esposito, G.; Mastrorocco, G.; Salvini, R.; Oliveti, M.; Starita, P. Application of UAV photogrammetry for the multi-temporal estimation of surface extent and volumetric excavation in the Sa Pigada Bianca open-pit mine, Sardinia, Italy. Environ. Earth Sci. 2017, 76, 1–16. [Google Scholar] [CrossRef]
- Riverscapes Consortium. Geomorphic Change Detection Software. 2020. Available online: http://gcd.riverscapes.xyz/ (accessed on 18 September 2020).
- Wheaton, J.M.; Brasington, J.; Darby, S.E.; Sear, D.A. Accounting for uncertainty in DEMs from repeat topographic surveys: Improved sediment budgets. Earth surface processes and landforms. J. Br. Geomorphol. Res. Group 2010, 35, 136–156. [Google Scholar] [CrossRef]
- Williams, R. DEMs of difference. Geomorphol. Tech. 2012, 2, 1–17. [Google Scholar]
- Alfonso-Torreño, A.; Schnabel, S.; Gómez-Gutiérrez, Á.; Crema, S.; Cavalli, M. Effects of gully control measures on sediment yield and connectivity in wooded rangelands. Catena 2022, 214, 106259. [Google Scholar] [CrossRef]
- Gutiérrez, Á.G.; Schnabel, S.; Contador, F.L. Gully erosion, land use and topographical thresholds during the last 60 years in a small rangeland catchment in SW Spain. Land Degrad. Dev. 2009, 20, 535–550. [Google Scholar] [CrossRef]
- Vanmaercke, M.; Poesen, J.; Van Mele, B.; Demuzere, M.; Bruynseels, A.; Golosov, V.; Bezerra, J.F.R.; Bolysov, S.; Dvinskih, A.; Frankl, A.; et al. How fast do gully headcuts retreat? Earth-Sci. Rev. 2016, 154, 336–355. [Google Scholar] [CrossRef]
- Castillo, C.; Gómez, J.A. A century of gully erosion research: Urgency, complexity and study approaches. Earth-Sci. Rev. 2016, 160, 300–319. [Google Scholar] [CrossRef]
- Ran, Q.; Su, D.; Li, P.; He, Z. Experimental study of the impact of rainfall characteristics on runoff generation and soil erosion. J. Hydrol. 2012, 424, 99–111. [Google Scholar] [CrossRef]
- Samani, A.N.; Ahmadi, H.; Jafari, M.; Boggs, G.; Ghoddousi, J.; Malekian, A. Geomorphic threshold conditions for gully erosion in Southwestern Iran (Boushehr-Samal watershed). J. Asian Earth Sci. 2009, 35, 180–189. [Google Scholar] [CrossRef]
- Bora, M.J.; Bordoloi, S.; Pekkat, S.; Garg, A.; Sekharan, S.; Rakesh, R.R. Assessment of soil erosion models for predicting soil loss in cracked vegetated compacted surface layer. Acta Geophys. 2022, 70, 333–347. [Google Scholar] [CrossRef]
- Kirkby, M.J.; Bracken, L.J. Gully processes and gully dynamics. Earth Surf. Processes Landf. J. Br. Geomorphol. Res. Group 2009, 34, 1841–1851. [Google Scholar] [CrossRef]
- Chaplot, V. Impact of terrain attributes, parent material and soil types on gully erosion. Geomorphology 2013, 186, 1–11. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Survey Positions 1 | Gully Coverage (m2) | Percentage (%) | Gully Headcut Coverage (m2) | Percentage (%) |
|---|---|---|---|---|
| TLS position 1 | 566.96 | 46.21 | 167.14 | 83.89 |
| TLS position 2 | 578.94 | 47.18 | 157.37 | 78.99 |
| TLS position 3 | 410.50 | 33.46 | 99.93 | 50.16 |
| TLS position 4 | 547.85 | 44.65 | 80.23 | 40.27 |
| TLS position 5 | 521.01 | 42.46 | - | - |
| TLS position 6 | 382.25 | 31.15 | - | - |
| TLS position 7 | 540.96 | 44.09 | - | - |
| TLS position 8 | 381.63 | 31.10 | - | - |
| Total coverage | 1190.04 | 96.99 | 193.49 | 97.12 |
| Survey Positions | Planned Coverage | Achieved Coverage | ||
|---|---|---|---|---|
| Gully Coverage (m2) | Percentage (%) | Gully Coverage (m2) | Percentage (%) | |
| TLS position 1 | 566.96 | 46.21 | 540.47 | 44.05 |
| TLS position 2 | 578.94 | 47.18 | 498.81 | 40.65 |
| TLS position 3 | 410.50 | 33.46 | 407.18 | 33.19 |
| TLS position 4 | 547.85 | 44.65 | 471.72 | 38.45 |
| TLS position 5 | 521.01 | 42.46 | 439.18 | 35.79 |
| TLS position 6 | 382.25 | 31.15 | 361.94 | 29.50 |
| TLS position 7 | 540.96 | 44.09 | 414.11 | 33.75 |
| TLS position 8 | 381.63 | 31.10 | 311.86 | 25.42 |
| Total coverage | 1190.04 | 96.99 | 1181.07 | 96.26 |
| Gully Headcut | TLS Positions | Total Area (m2) | No of Points | Covered Area (m2) | Covered Area (%) |
|---|---|---|---|---|---|
| Planned coverage | P1–P4 | 199.23 | - | 197.43 | 99.10 |
| TLS survey 1 | P1–P4 | 199.23 | 25,875,206 | 195.70 | 98.23 |
| TLS survey 2 | P1–P4 | 199.23 | 2,665,029 | 193.49 | 97.12 |
| Survey | Point Cloud Characteristics | |||
|---|---|---|---|---|
| Total Number of Points | Average Point Density (No/m2) | SD (RMSE) | Mean TLS Survey Error | |
| TLS-2019 | 25,875,206 | 92,411.45 | 0.4 (0.7) cm | 1.29 cm |
| TLS-2020 | 2,665,029 | 95,179.63 | 1.5 (1.8) cm | 1.37 cm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Domazetović, F.; Šiljeg, A.; Marić, I.; Panđa, L. A New Systematic Framework for Optimization of Multi-Temporal Terrestrial LiDAR Surveys over Complex Gully Morphology. Remote Sens. 2022, 14, 3366. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14143366
Domazetović F, Šiljeg A, Marić I, Panđa L. A New Systematic Framework for Optimization of Multi-Temporal Terrestrial LiDAR Surveys over Complex Gully Morphology. Remote Sensing. 2022; 14(14):3366. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14143366
Chicago/Turabian StyleDomazetović, Fran, Ante Šiljeg, Ivan Marić, and Lovre Panđa. 2022. "A New Systematic Framework for Optimization of Multi-Temporal Terrestrial LiDAR Surveys over Complex Gully Morphology" Remote Sensing 14, no. 14: 3366. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14143366