
Virtual Level Analysis Applied to Wave Flume Experiments: The Case of Waves-Cubipod Homogeneous Low-Crested Structure Interaction





Abstract
:1. Introduction
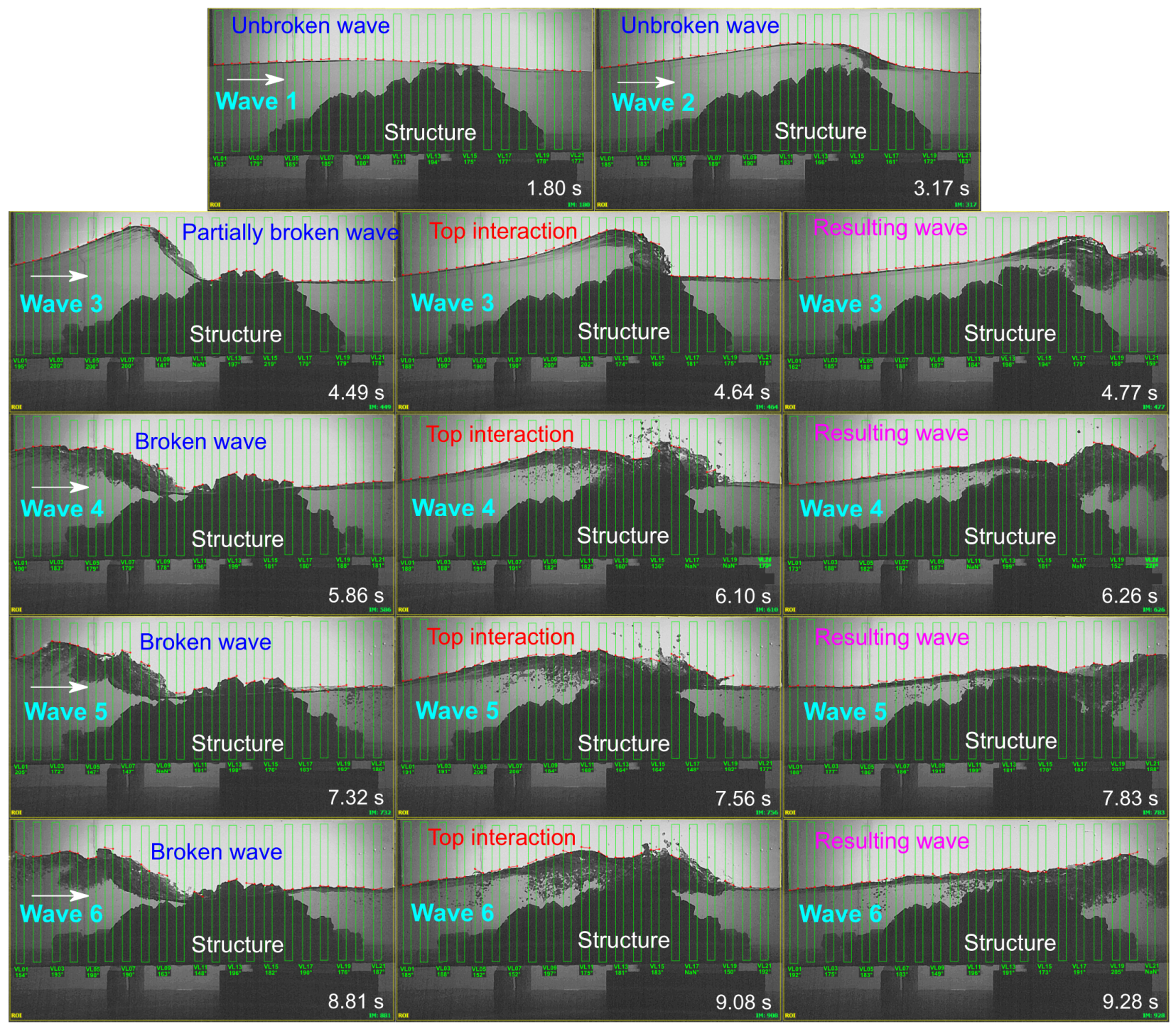
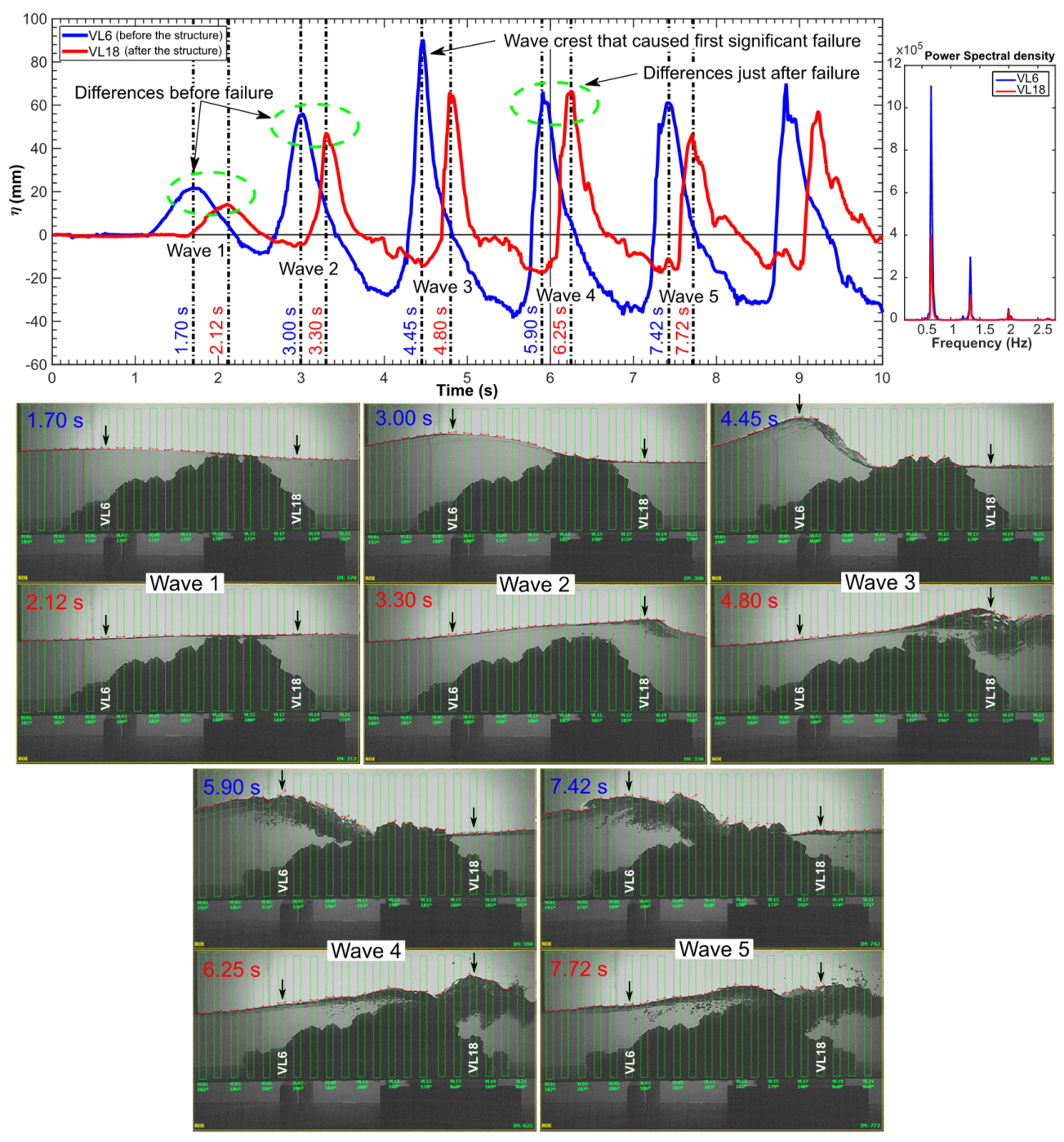
- Details of the violent interaction of breaking waves with a Cubipod HLCS, which are critical conditions at which they can be subjected, were investigated.
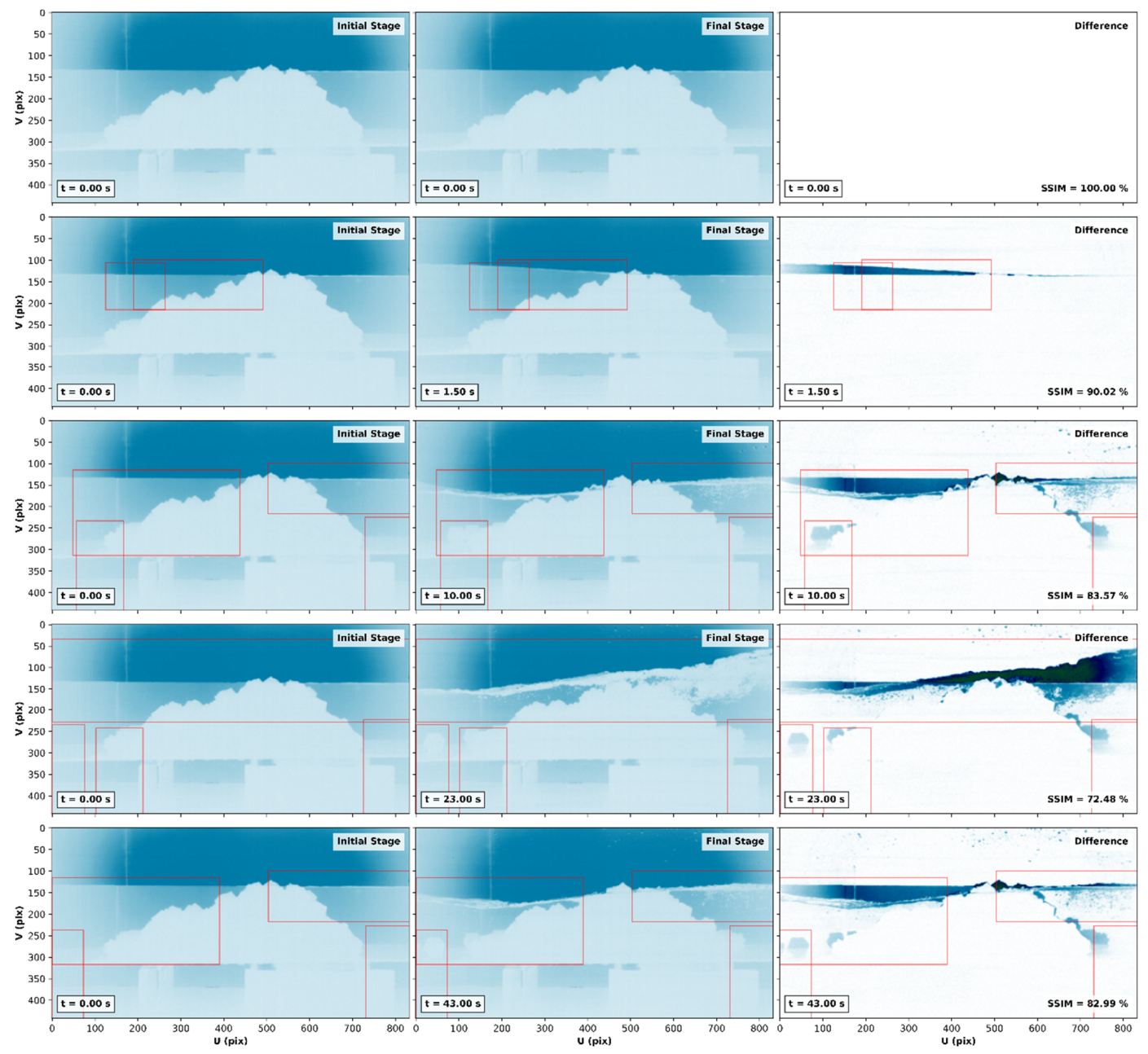
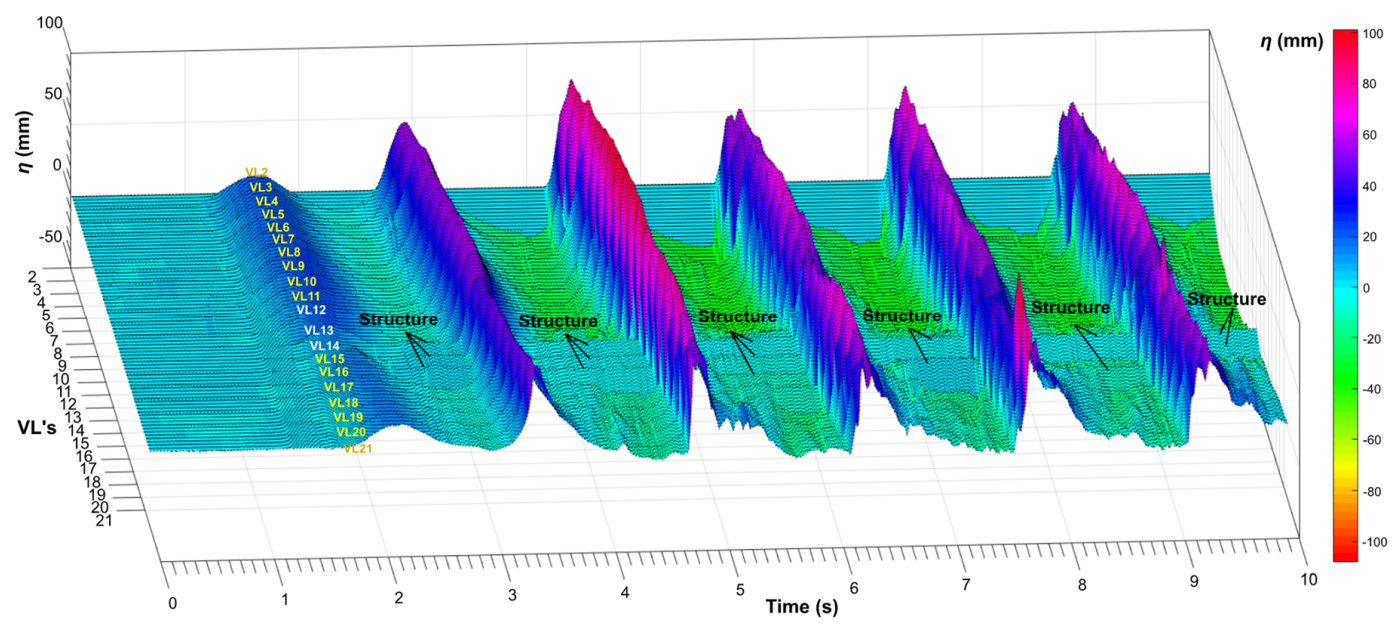
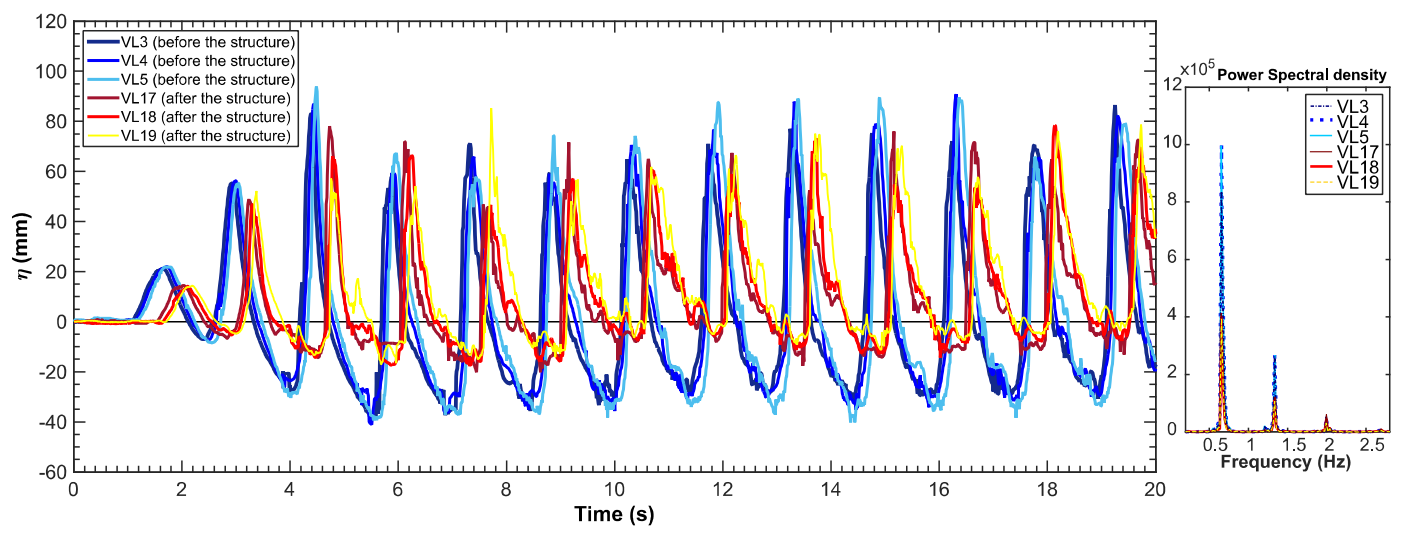
- We investigated the spatio-temporal evolution of water elevations before and after interaction of the incident waves with the structure following a 2D assumption. This approach can provide useful data for detailed model validations in this type of research.
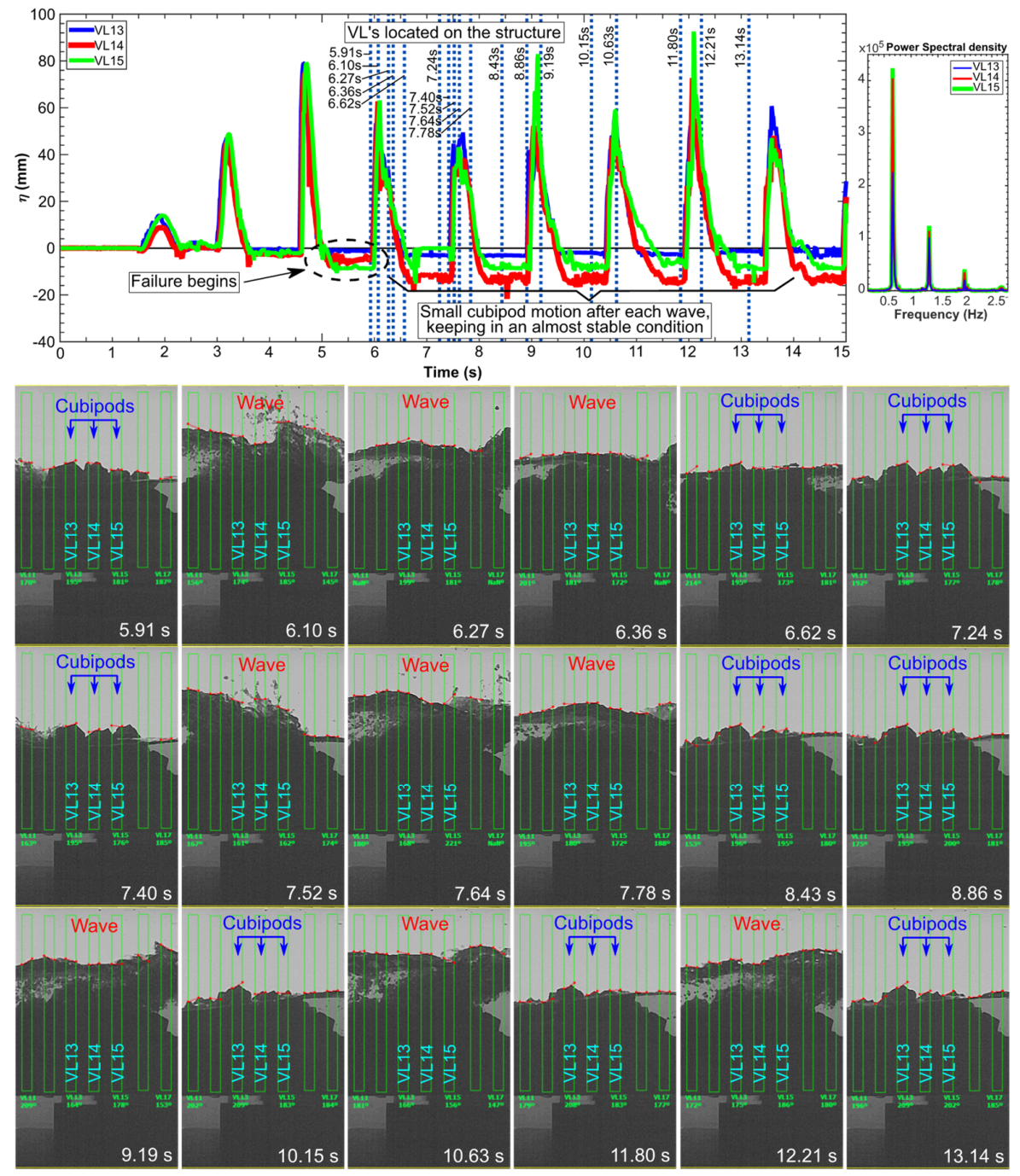
- With the use of VL measurements, it was possible to track slight variations of Cubipods located above the water free surface, identifying the instants of failure of the top of the structure during the wave interactions.
2. Physical Tests
2.1. Experimental Set Up
2.2. Case Study
3. Image-Based Approaches
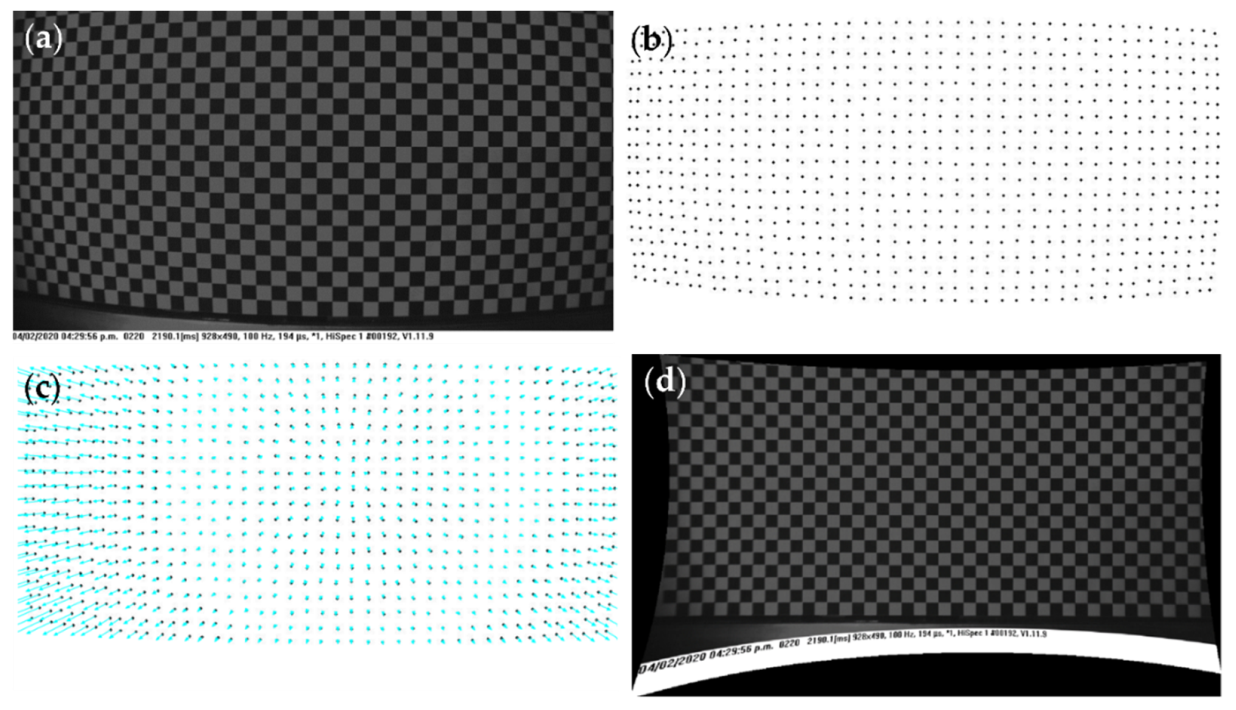
3.1. Stage 1: Calibration and Rectification
3.1.1. Image Calibration
3.1.2. Image Rectification
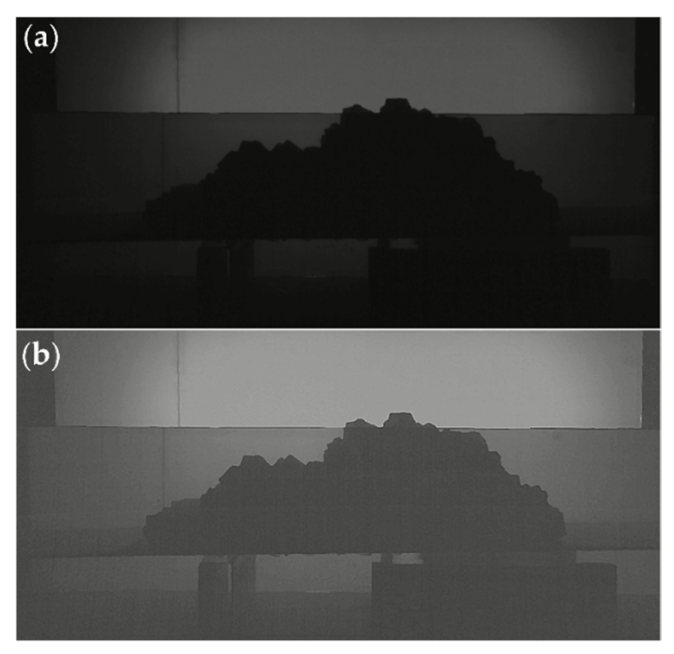
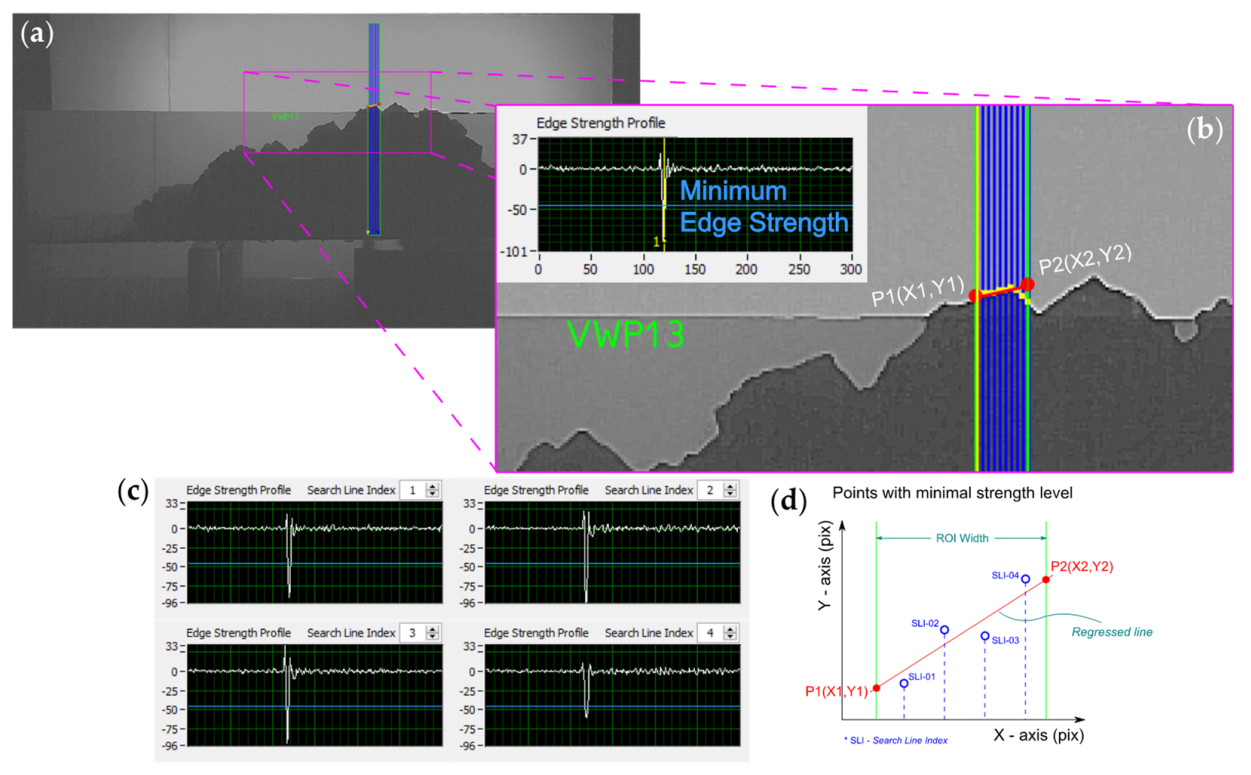
3.2. Image Processing
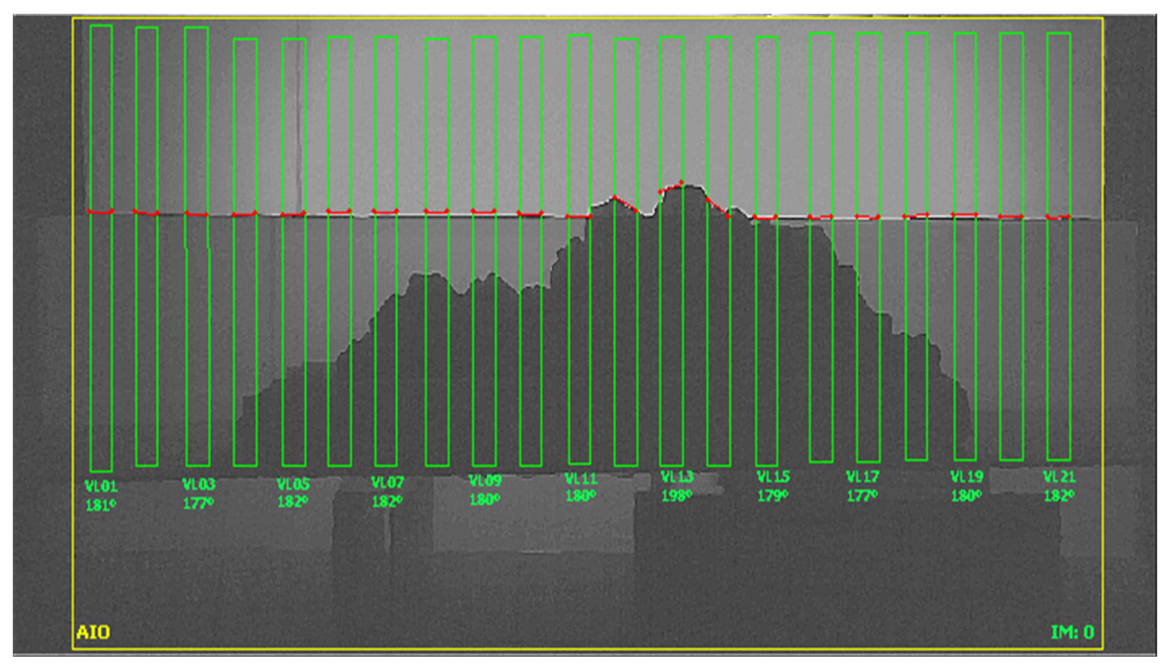
3.3. Image Analysis
4. Results and Discussion
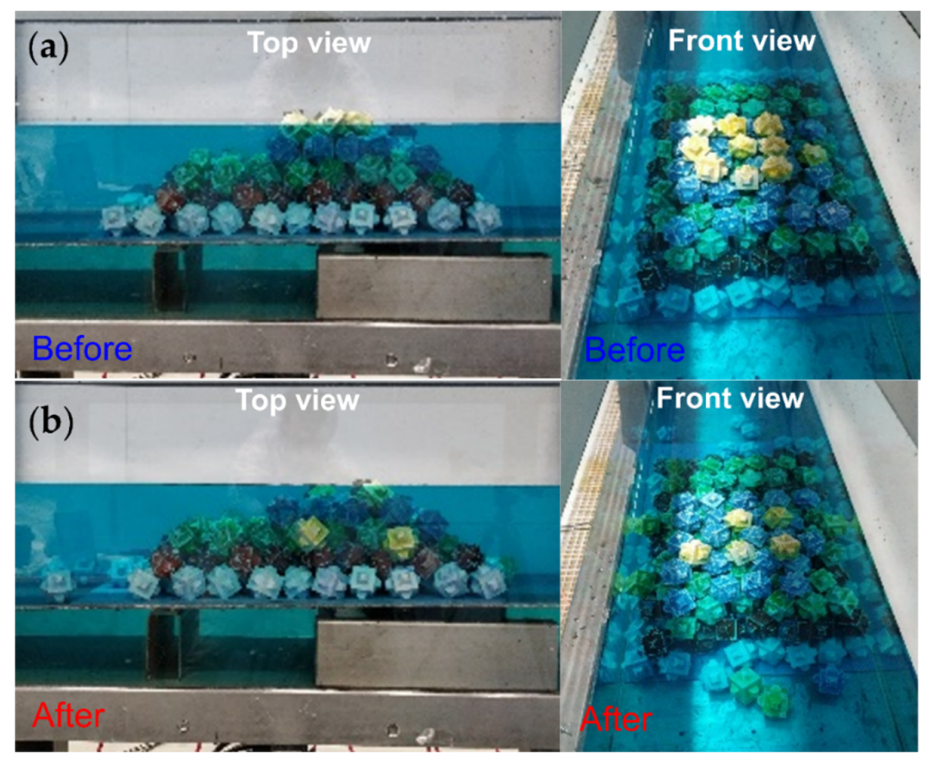
4.1. Qualitative Analysis of the Experiments
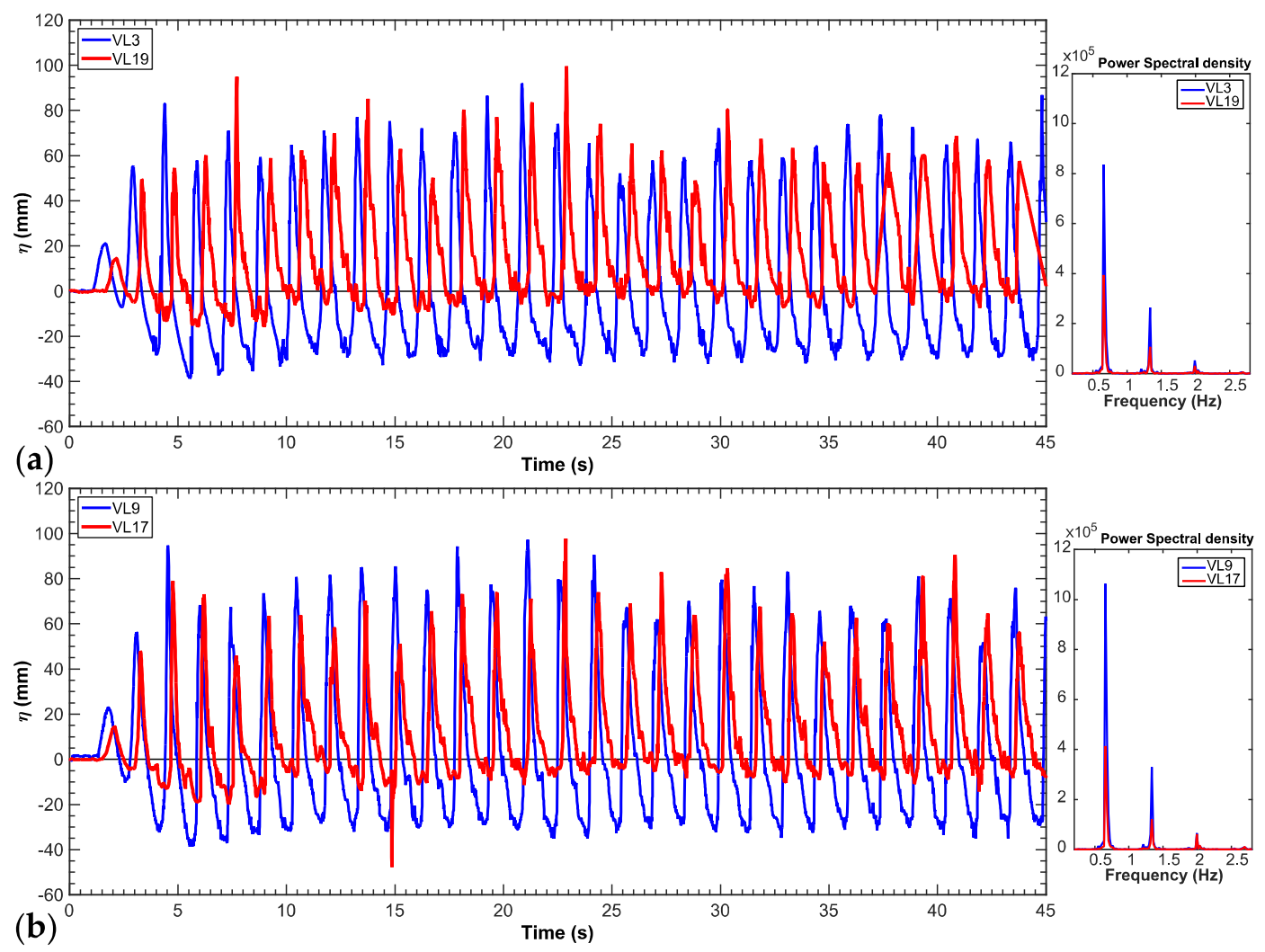
4.2. Water Elevation Analysis
4.3. Identification of Structure Failure
5. Conclusions
- Drastic changes identified in the levels of the Cubipods interfaces (edges) can be useful to investigate failure modes in similar structure configurations.
- The failure of the Cubipods at the crest showed the decreased performance of the structure to reduce the incoming wave elevations.
- The water elevation data that can be obtained with this approach before and after the structure can be useful to perform comparisons with analytical or numerical models.
- Although it is complex to build identical structure models as the one presented in this work, limiting systematic analysis, the present image-based approach can be extended to analyze a wide range of wave flume configurations. In this research, the internal memory of the camera was used. By increasing this memory, the approach can be further used to analyze breakwater behavior in irregular sea.
- The use of color cameras, the application of improved image enhancement methods, and the definition of VLs of different sizes at specific locations could be helpful to identify and monitor the displacement of different interfaces.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Virtual Level Definition

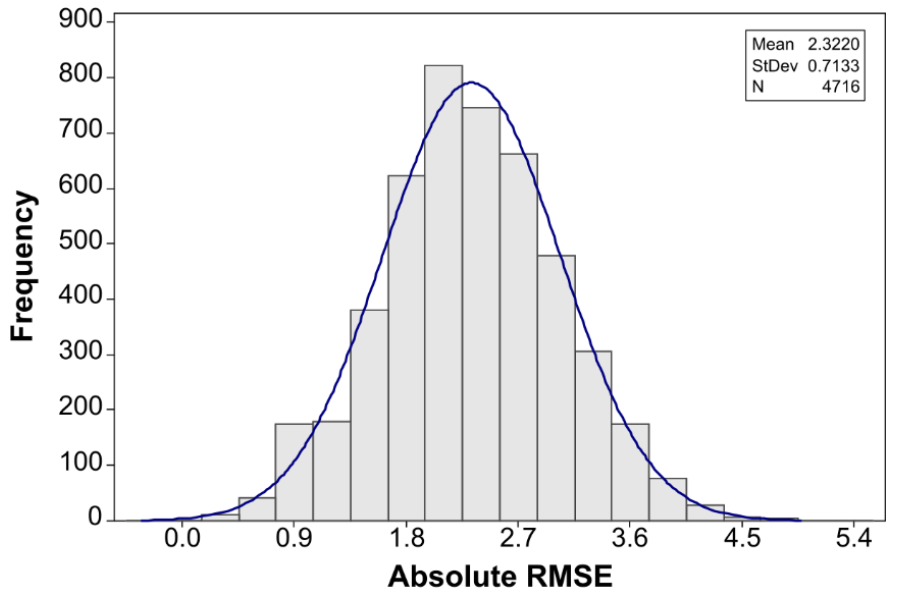
Appendix B. Reliability Analysis of the VL Measurements

References
- Campos, Á.; Sanchez, M.R.; Castillo, E. Damage in Rubble Mound Breakwaters. Part II: Review of the Definition, Parameterization, and Measurement of Damage. J. Mar. Sci. Eng. 2020, 8, 306. [Google Scholar] [CrossRef]
- Douglas, S.; Cornett, A.; Nistor, I. Image-Based Measurement of Wave Interactions with Rubble Mound Breakwaters. J. Mar. Sci. Eng. 2020, 8, 472. [Google Scholar] [CrossRef]
- Lopes, H.; Pinto, F.T.; Gomes, F.V.; Cabral, J.; Gadelho, J.; Neves, M.; Reis, M. Laboratory Techniques-Image Processing Tools on Physical Model Tests. In Proceedings of the 6th SCACR International Short Course/Conference on Applied Coastal Research, Lisbon, Portugal, 4–7 June 2013. [Google Scholar]
- Viriyakijja, K.; Chinnarasri, C. Wave Flume Measurement Using Image Analysis. Aquat. Procedia 2015, 4, 522–531. [Google Scholar] [CrossRef]
- Gómez-Martín, M.E.; Medina, J.R. Wave-To-Wave Exponential Estimation of Armor Damage Progression. In Coastal Engineering; World Scientific: Singapore, 2004; Volume 4, pp. 3592–3604. [Google Scholar]
- Vidal, C.; Martín, F.L.; Negro, V.; Gironella, X.; Madrigal, B.; García-Palacios, J. Measurement of Armor Damage on Rubble Mound Structures: Comparison Between Different Methodologies. Coast. Struct. 2003 2004, 189–200. [Google Scholar] [CrossRef]
- Gómez-Martín, M.E.; Medina, J.R.; Franco, L.; Tomasicchio, G.R.; Lamberti, A. Cubipod Concrete Armour Unit and Heterogeneous Packing. In Coastal Structures 2007; World Scientific Pub. Co. Pte. Lt.: Singapore, 2009; Volume 2, pp. 140–151. [Google Scholar]
- Gómez-Martín, M.E.; Medina, J.R.; Smith, J.M. Damage Progression on Cube Armored Breakwaters. In Coastal Engineering 2006; World Scientific Pub. Co. Pte. Lt.: Singapore, 2007; Volume 5, pp. 5229–5240. [Google Scholar]
- Lomonaco, P.; Vidal, C.; Medina, J.R.; Gomez-Martin, M.E. Evolution of Damage on Roundheads Protected with Cube and Cubipod Armour Units. Coast. Mar. Struct. Break. 2009, 1, 169–180. [Google Scholar]
- Lemos, R.; Reis, M.T.; Fortes, C.J.; Peña, E.; Sande, J.; Figuero, A.; Alvarellos, A.; Laiño, E.; Santos, J.; Kerpen, N. Measuring Armour Layer Damage in Rubble-Mound Breakwaters under Oblique Wave Incidence. Coast. Struct. 2019, 295–305. [Google Scholar] [CrossRef]
- Kocaman, S.; Ozmen-Cagatay, H. The Effect of Lateral Channel Contraction on Dam Break Flows: Laboratory Experiment. J. Hydrol. 2012, 432, 145–153. [Google Scholar] [CrossRef]
- Hernández-Fontes, J.V.; Esperança, P.d.T.T.; Graniel, J.F.B.; Sphaier, S.H.; Silva, R. Green Water on A Fixed Structure Due to Incident Bores: Guidelines and Database for Model Validations Regarding Flow Evolution. Water 2019, 11, 2584. [Google Scholar] [CrossRef] [Green Version]
- Hernández-Fontes, J.V.; Hernández, I.D.; Mendoza, E.; Silva, R. Green Water Evolution on a Fixed Structure Induced by Incoming Wave Trains. Mech. Based Des. Struct. Mach. 2020, 1–29. [Google Scholar] [CrossRef]
- Hernández, I.D.; Hernández-Fontes, J.V.; Vitola, M.A.; Silva, M.; Esperança, P.T. Water Elevation Measurements Using Binary Image Analysis for 2d Hydrodynamic Experiments. Ocean Eng. 2018, 157, 325–338. [Google Scholar] [CrossRef]
- Hernández-Fontes, J.V.; Hernández, I.D.; Silva, R.; Mendoza, E.; Esperança, P.T.T. A Simplified and Open-Source Approach for Multiple-Valued Water Surface Measurements in 2D Hydrodynamic Experiments. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 623. [Google Scholar] [CrossRef]
- Medina, J.; Gómez-Martín, M.E.; Mares-Nasarre, P.; Odériz, I.; Mendoza, E.; Silva, R. Hydraulic Performance of Homogeneous Low-Crested Structures. Coast. Struct. 2019, 2019, 60–68. [Google Scholar]
- Odériz, I.; Mendoza, E.; Silva, R.; Medina, J. Hydraulic Performance of a Homogeneous Cubipod Low-Crested Mound Breakwater. In Proceedings of the 7th International Conference on the Application of Physical Modelling in Coastal and Port Engineering and Science (Coastalab18), Cantabria, Spain, 22 May 2018. [Google Scholar]
- Medina, J.R.; Gomez-Martin, M.E.; Mares-Nasarre, P.; Escudero, M.; Oderiz, I.; Mendoza, E.; Silva, R. Homogeneous Low-Crested Structures for Beach Protection in Coral Reef Areas. In Proceedings of the Coastal Engineering Proceedings; Coastal Engineering Research Council: Sydney, Australia, 2020; p. 59. [Google Scholar]
- Maiden, M.D.; Franco, N.A.; Webb, E.; El, G.; Hoefer, M.A. Solitary Wave Fission of a Large Disturbance in a Viscous Fluid Conduit. J. Fluid Mech. 2020, 883. [Google Scholar] [CrossRef] [Green Version]
- Trillo, S.; Deng, G.; Biondini, G.; Klein, M.; Clauss, G.F.; Chabchoub, A.; Onorato, M. Experimental Observation and Theoretical Description of Multisoliton Fission in Shallow Water. Phys. Rev. Lett. 2016, 117, 144102. [Google Scholar] [CrossRef] [PubMed]
- Fastec-Imaging HiSpec 1 Innovative Low-Light High-Speed Camera 2020. Available online: https://www.fastecimaging.com/wp-content/uploads/2018/05/hispec1.pdf (accessed on 19 December 2020).
- Zhang, Z. A Flexible New Technique for Camera Calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef] [Green Version]
- NI. National Instruments Vision Assistant; Version 2014; NI: Austin, TX, USA, 2014; Available online: https://www.ni.com/pdf/manuals/373379h.pdf (accessed on 11 February 2021).
- Wang, Y.M.; Li, Y.; Zheng, J.B. A Camera Calibration Technique Based on OpenCV. In Proceedings of the 3rd International Conference on Information Sciences and Interaction Sciences, Chengdu, China, 23–25 June 2010; pp. 403–406. [Google Scholar]
- Lee, J.; Haralick, R.; Shapiro, L. Morphologic Edge Detection. IEEE J. Robot. Autom. 1987, 3, 142–156. [Google Scholar] [CrossRef]
- Marr, D.; Hildreth, E. Theory of Edge Detection. Series, B. Biological Sciences; The Royal Society: London, UK, 1980; Volume 207, pp. 187–217. [Google Scholar]
- Kennedy, A. Fundamentals of Water Waves. In Encyclopedia of Water: Science, Technology, and Society; Wiley: Hoboken, NJ, USA, 2019; pp. 1–7. [Google Scholar]
- Saprykina, Y.V.; Kuznetsov, S.; Smith, J.M. Nonlinear Mechanisms of Formation of Wave Irregularity on Deep and Shallow Water. In Coastal Engineering 2008; World Scientific Pub. Co. Pte. Lt.: Singapore, 2009; Volume 5, pp. 357–369. [Google Scholar]
- MathWorks MathWorks: FFT for Spectral Analysis. Available online: https://la.mathworks.com/help/matlab/math/fft-for-spectral-analysis.html (accessed on 15 January 2021).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scale | Crown Width (m) | Base Width (m) | Structure Height (m) | Number of Rows of the 5-Layer Cross-Section |
|---|---|---|---|---|
| 1:42.8 | 0.16 | 0.61 | 0.19 | 11 + 9 + 8 + 5 + 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Escudero, M.; Hernández-Fontes, J.V.; Hernández, I.D.; Mendoza, E. Virtual Level Analysis Applied to Wave Flume Experiments: The Case of Waves-Cubipod Homogeneous Low-Crested Structure Interaction. J. Mar. Sci. Eng. 2021, 9, 230. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9020230
Escudero M, Hernández-Fontes JV, Hernández ID, Mendoza E. Virtual Level Analysis Applied to Wave Flume Experiments: The Case of Waves-Cubipod Homogeneous Low-Crested Structure Interaction. Journal of Marine Science and Engineering. 2021; 9(2):230. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9020230
Chicago/Turabian StyleEscudero, Mireille, Jassiel V. Hernández-Fontes, Irving D. Hernández, and Edgar Mendoza. 2021. "Virtual Level Analysis Applied to Wave Flume Experiments: The Case of Waves-Cubipod Homogeneous Low-Crested Structure Interaction" Journal of Marine Science and Engineering 9, no. 2: 230. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9020230