
Simple Gain-Scheduled Control System for Dissolved Oxygen Control in Bioreactors


Department of Automation, Kaunas University of Technology, LT-51367 Kaunas, Lithuania
*
Author to whom correspondence should be addressed.
Processes 2021, 9(9), 1493; https://0-doi-org.brum.beds.ac.uk/10.3390/pr9091493
Submission received: 2 July 2021
/
Revised: 15 August 2021
/
Accepted: 21 August 2021
/
Published: 25 August 2021
(This article belongs to the Special Issue Mathematical Modeling and Control of Bioprocesses)
Abstract
:An adaptive control system for the set-point control and disturbance rejection of biotechnological-process parameters is presented. The gain scheduling of PID (PI) controller parameters is based on only controller input/output signals and does not require additional measurement of process variables for controller-parameter adaptation. Realization of the proposed system does not depend on the instrumentation-level of the bioreactor and is, therefore, attractive for practical application. A simple gain-scheduling algorithm is developed, using tendency models of the controlled process. Dissolved oxygen concentration was controlled using the developed control system. The biotechnological process was simulated in fed-batch operating mode, under extreme operating conditions (the oxygen uptake-rate’s rapidly and widely varying, feeding and aeration rate disturbances). In the simulation experiments, the gain-scheduled controller demonstrated robust behavior and outperformed the compared conventional PI controller with fixed parameters.
1. Introduction
Intense global competition, business strategies that are mainly based on profit, promptly developing social and economic conditions, high interest in better-quality control, increased safety concerns, and stringent environmental norms are prompting many process industries to automate their operations using accurate, robust, reliable, efficient, optimal, adaptive and intelligent advanced control systems [1,2]. Control-system design is greatly influenced by the number of nonlinearities present within the process. Classical controllers, such as proportional–integral–derivative (PID) or proportional–integral (PI) are adequate if the nonlinearity encountered is very mild. In presence of significant number of nonlinearities, however, such linear models are ineffective, since even small disturbances can force the process away from the operating point [3]. Control quality is influenced by the controller’s ability to provide a stable performance while dealing with process variability and disturbances [1,2,4]. Accurate control of technological parameters during microorganism cultivation processes is necessary for retaining currency with desired technological regimes and reproducibility of processes. However, the dynamical parameters of batch and fed-batch cultivation processes vary widely over the cultivation cycle. Therefore, conventional control systems with fixed-gain controllers are not able to provide the required performance [5]. Temperature, pH, dissolved oxygen concentration, and other basic process variables are usually controlled in these systems [6].
Adaptive control systems of various complexity have been developed for the automatic control of cultivation process parameters under time-varying operation conditions. The system, based on process tendency models and online measurements of process variables [4,7,8], provides high-quality control under extreme operating conditions (oxygen uptake rate rapidly changing within a wide range, feeding and aeration rate disturbances). However, development of a model-based control algorithm is a time-consuming task, and, in addition, online measurements of the process variables require advanced instrumentation of the controlled process. Expert, knowledge-driven adaptive fuzzy systems are effective; however, they require deep process knowledge [3,6,9]. An approach of development for the control systems of dissolved oxygen concentration (DOC) and pH based on artificial neural network (ANN) models is presented in [10,11]. A. Mészáros et al. present ANNs that are trained off-line to predict the nonlinear dynamics of controlled processes and the inverse ANNs are used in the control systems as feedback controllers [10]. Du, Xianjun, et al. developed a radial basis function neural network based adaptive PID controller for DOC control [11]. Such development of ANN model-based control systems requires a sufficient amount of informative process data and time expenses for training the ANNs. For to these reasons, application of complex control systems is not attractive in industrial bioprocess-control engineering practice.
Model–reference adaptive control (MRAC) uses a reference model of the process that defines how the process output should respond to a command signal [12]. Although MRAC is a good alternative to PID it must be tuned for each particular process, and the tuning depends on the presence of lag, delay and other factors. For non-well-known processes, the controller must be tuned experimentally, and it could be a disadvantage from a commercial or business point of view [3].
Several gain-scheduling approach-based control systems have been developed for adaptive control of batch bioreactors. In the control systems, the oxygen uptake rate (OUR) [13,14] and the carbon dioxide evolution rate (CER) [15] are used as gain-scheduling variables. In the control systems, the OUR and CER are estimated from the online analysis of an exhaust gas. A requirement for practical realization of the above systems is that the bioreactor system is equipped with the exhaust gas analyzer.
DOC control systems have been also developed [16,17], in which the PID (PI) controller adaptation does not require additional measurements of process variables. The controller adaptation is based on the online statistical analysis of controller input and output data. Computer simulations of the control systems performance show the working capacity of the adaptation algorithms. However, optimal values of the algorithm tuning parameters are determined by a “trial and error” approach that is time-consuming. Various other PID controller-tuning approaches are presented in [18,19,20,21]. A feedforward–feedback controller was proposed, in [22], in which processes that evolve exponentially were controlled.
In order to simplify controller adaptation algorithms and practical realization of the adaptive control systems for cultivation process control, in this contribution the authors propose the gain scheduling approach, which is based on controller input/output signals only and does not require additional online measurements of cultivation process variables for adaptation of controller parameters.
2. Materials and Methods
2.1. Development of Adaptation Algorithm for DOC Control
Dynamics of the dissolved oxygen concentration (DOC) in culture medium can be represented by a simple tendency model based on the mass balance for DOC:
where KLa is oxygen transfer coefficient:
c is DOC, csat is saturation value of DOC, OUR is oxygen uptake rate, u is stirring speed (control variable), q is air supply rate, α, β and γ are parameters, and t is time.
Linearization of eq. (1) around the process state point at time tk with respect to the state (c) and the control (u) variables represents the DOC dynamics equation at time tk:
From Equation (3), the DOC dynamics can be represented by a first-order transfer function model:
Kpr(tk) and Tpr(tk) are process controller gain and integration time constant at time point tk, respectively, s is Laplace operator.
The resultant dynamics of controlled process in the DOC control system also depends on the stable dynamical parameters of the motor–stirrer system and the DOC electrode. As the time constants of the above control system elements are significantly smaller, compared with the time constant Tpr(tk), their influence on controlled-process dynamics is taken into account by adding some time delay to the transfer function model (4).
Therefore, dynamics of the DOC control process can be roughly represented by the first-order-plus-time delay (FOPTD) model:
where τ is time delay representing influence of the control system elements dynamics.
According to PI controller tuning rules (Ziegler–Nichols, internal model control (IMC), etc. [23]), the controller gain Kc is proportional to the ratio Tpr/Kpr/τ and the integration constant Ti is proportional to the resultant time constant Tpr. Taking into account the functional relationships (5), (6), and assuming that the controlled value of the DOC during cultivation process is close to the set-point value (c ≅ cset), a character of relationships between the controller tuning parameters and the controller output and the set-point signals can be estimated:
Based on relationship (8), the gain scheduling algorithm for controller gain adaptation takes the following form:
where u and cset are the gain scheduling variables; KKc is coefficient for tuning the controller to obtain desired performance of the control system (approximate values of the coefficient can be taken from the desired controller tuning rules). The power β of stirring speed in the oxygen transfer rate estimation Equation (6) is typically β ≅ 2 [24] and the formula (9) for scheduling the controller gain coefficient can be reduced to:
A character of relationships between the controller integration constant and the controller output is the following:
Based on relationship (11), the gain scheduling algorithm for controller integration time constant adaptation takes the following form:
where kTi is coefficient for tuning the controller to obtain desired performance of the control system (approximate value of the coefficient can be taken from the desired controller tuning rules). DOC model parameter values and initial conditions of the state variables are given in Table 1.
2.2. Mathematical Model of the Biotechnological Process
To simulate the biotechnological process, a mathematical model of an E.coli fed-batch process similar to the one presented in [25] was used:
where x—biomass concentration in the cultivation medium, gl−1; μ—biomass specific growth rate, lh−1; V—cultivation medium volume, l; S0—substrate concentration in feed, gl−1; Fsmp—sampling rate- Yxs—biomass/substrate yield coefficient, gg−1; ca is DOC in absolute units, mmol L−1; kc is parameter, mmol L−1. The Luedeking–Piret model was used to calculate the oxygen uptake rate [26]:
Values of the model parameters are given in Table 2.
A set of equations is used to model and simulate the controlled process [8]:
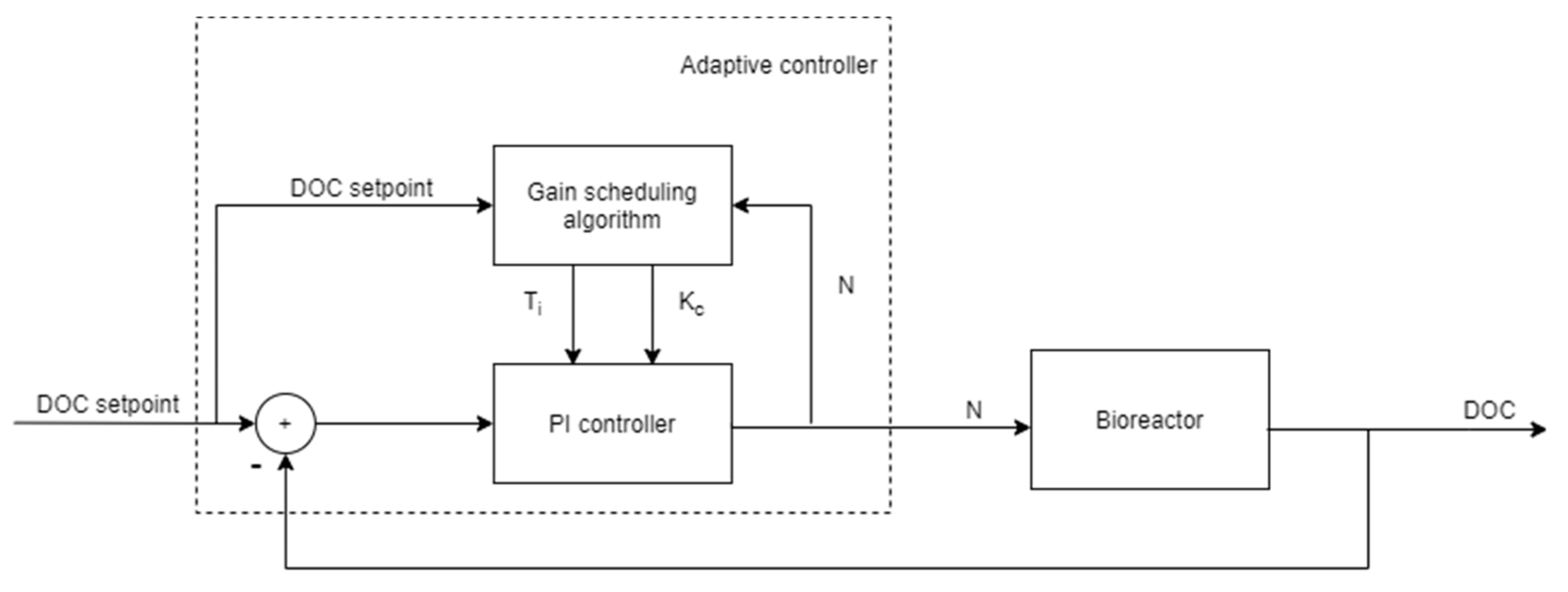
where qset is set value of air supply rate, lh−1; uset is set value of stirring speed (control variable), h−1; yO2 is portion of oxygen in exhaust gas, -; OURV is volumetric oxygen uptake rate, mmol L−1 h−1, ael is auxiliary variable, %; cel is signal from dissolved oxygen (DO) electrode, %; H is Henry’s constant, L mmol−1; V is volume of cultural liquid, l; vmol is volume of mmol of gas, L mmol−1; Tq, Tu, Tel1, Tel2 are time constants of air supply system, motor-stirrer system, and DOC electrode, respectively, s; ε is gas holdup in the gas-liquid dispersion. The dynamics of air supply and stirring systems is modelled by Equations (21) and (22). Equations (23) and (24) represent mass balances on oxygen in liquid and gaseous phases. Equations (25) and (26) are used to model the second-order dynamics of DOC electrode. A scheme of the DOC control system is depicted in Figure 1.
As shown in Figure 1, the DOC adaptive control system uses only controller input/output signals for the gain scheduling algorithms.
The DOC measurements were simulated by adding Gaussian noise:
where cel_m is measured value of DOC; σ is standard deviation estimated from real measurements (σ ≅ 0.2%), Randn is a sequence of normalized Gaussian random numbers.
In the gain-scheduling and PI-control algorithms the time discretization step Δt = 0.18 s was used throughout the simulation experiments. The simulations were carried out in Matlab/Simulink environment.
Performance of the DOC adaptive control system was investigated for set-point tracking and disturbance rejection. The developed system was compared with the standard control approach with fixed PI controller parameters presented in Table 3.
The performance of the developed control algorithm was evaluated by calculating the mean absolute error (MAE) and comparing it to the MAE of the conventional system with fixed controller parameters.
3. Results and Discussion
3.1. DOC Control System Performance
3.1.1. DOC Set-Point Tracking Performance
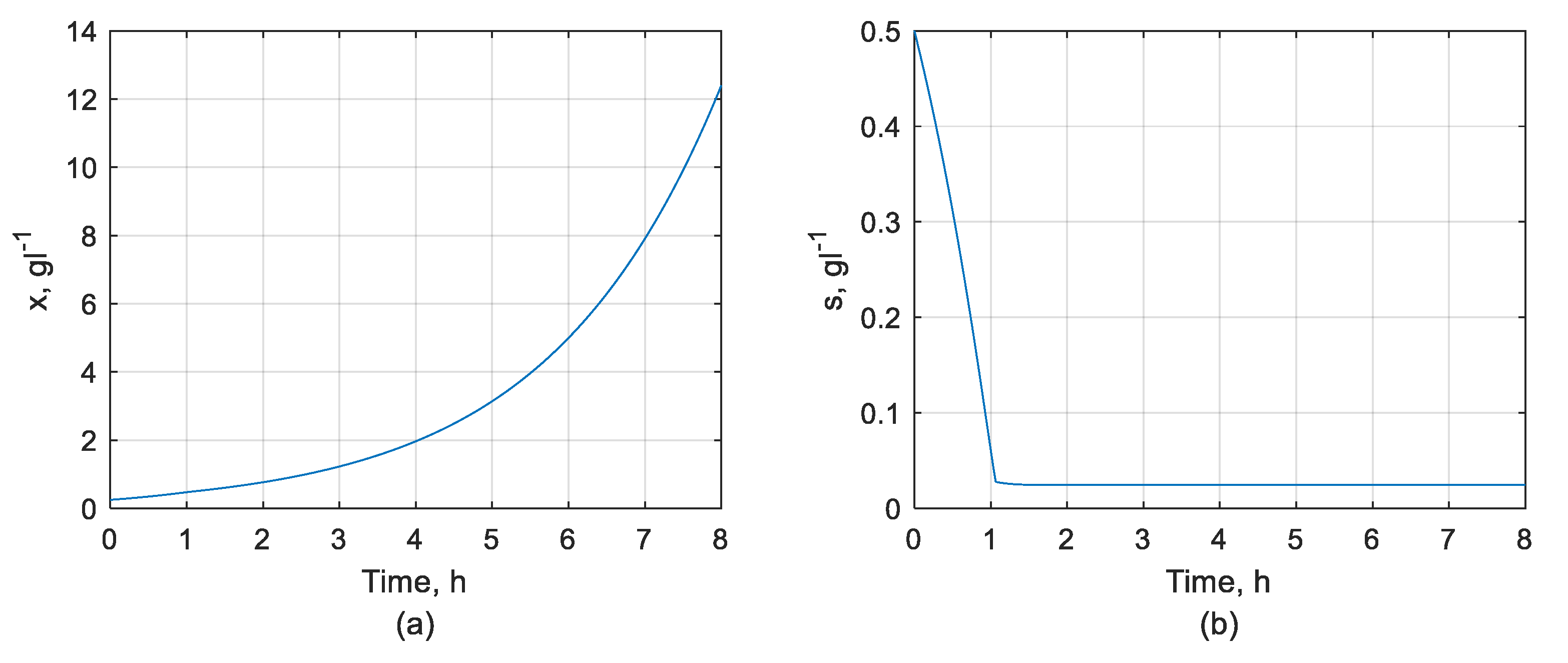
The bioprocess was simulated by numerically solving the Equations (14)–(26) and by applying the controller parameter adaptation rules defined by the Equations (12) and (13) for DOC control. Typical trajectories of the bioprocess variables are presented in Figure 2 for the case when the DOC set-point tracking quality was investigated.
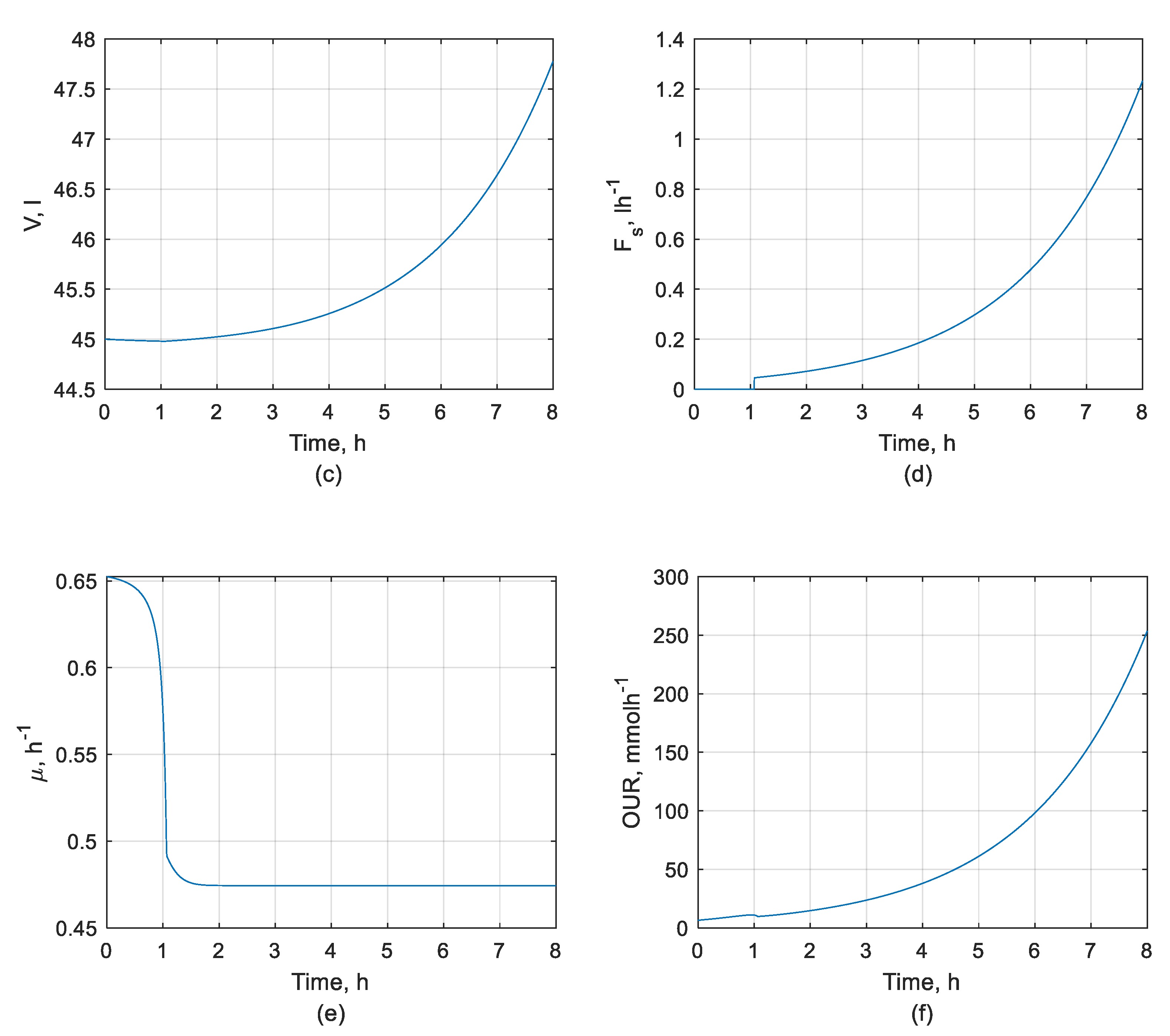
After inoculation, the biomass x (Figure 2a) grows in batch mode (until 1 h) consuming a small initial amount of substrate s (Figure 2b). Culture broth volume V in the bioreactor (Figure 2c) changes due to the feeding flow of the substrate Fs (Figure 2d), which is initiated at the end of the batch phase (~1 h). The biomass specific growth rate depends on the actual substrate concentration and DOC level (Equation (17), Figure 2e). Substrate oxidation and subsequent biomass growth result in oxygen consumption, which is reflected by the oxygen uptake rate OUR (Figure 2f).
During the cultivation process, DOC level is controlled by a PI controller. Both standard and gain-scheduled PI control systems were investigated and compared for the DOC control.
To reduce the large number of the presented figures, the plots with trajectories of the process variables (x, s, V, Fs, OUR) in the investigation of DOC disturbance rejection will be omitted. Only the plots for the controlled variable (DOC), manipulated variable (N), disturbance (q), and controller parameters (Kc, Ti) will be presented and discussed.
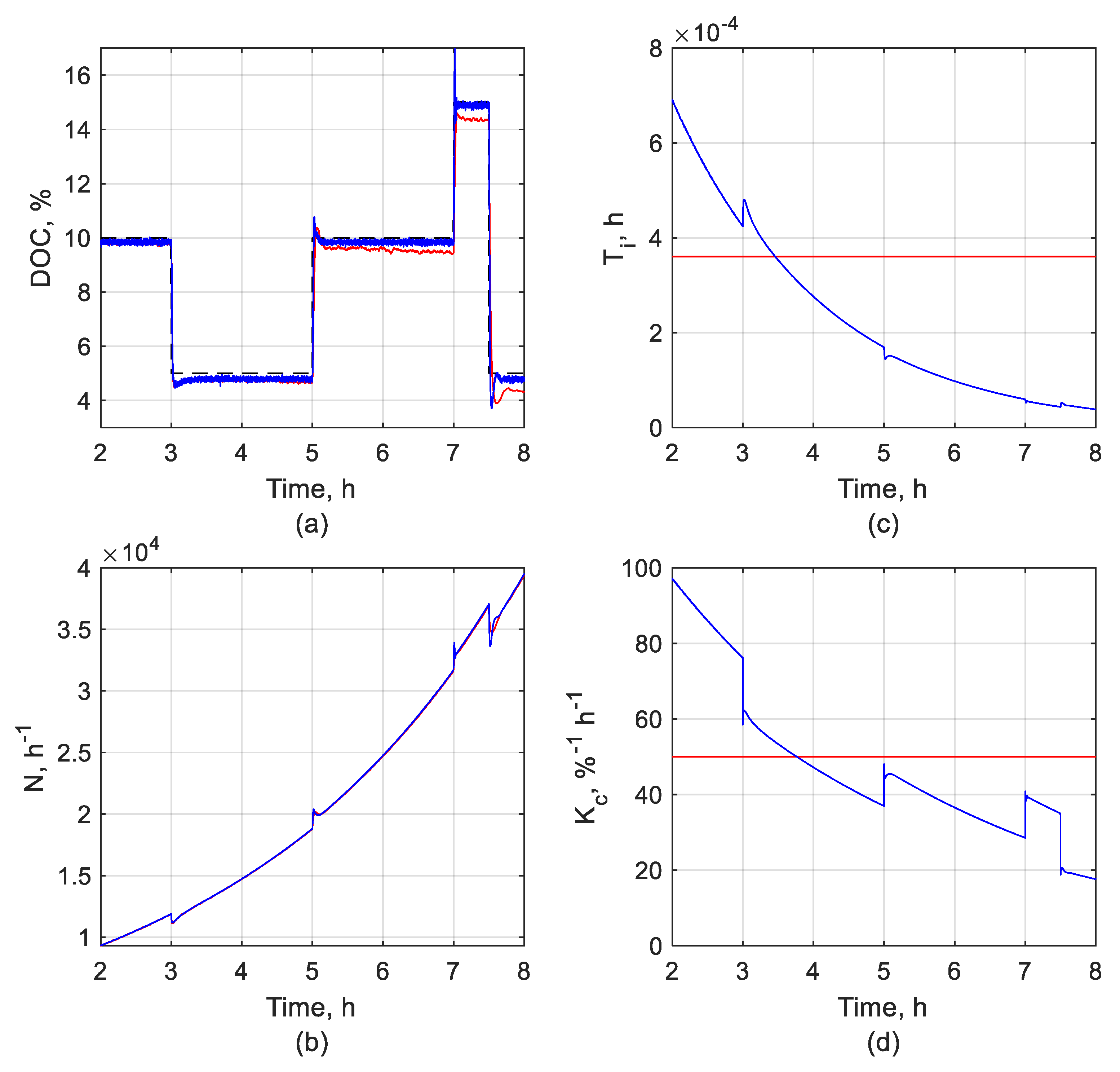
First, performance of the DOC adaptive control system was investigated for tracking set-point. In the simulation experiments, time profile of the DOC set-point change, depicted in Figure 3a was selected for the simulation fo close-to-realistic operating conditions in fed-batch cultivation process.
From preliminary experiments it was found that, at lower OUR and, consequently, lower agitation speed, the PI controller with the fixed tuning parameter values ensures a required control accuracy of DOC. The performance of the standard PI controller with fixed controller parameters and the adaptive control system can be seen in Figure 3a. The trajectory of the manipulated stirring speed N is presented in Figure 3b. Figure 3c,d highlight the adaptation of the controller tuning parameters during the simulation run. As it can be seen from Figure 3c,d, both the integration time constant and the controller gain decrease significantly with the increasing load of the system. Such a change of the tuning parameters allows to reduce the tracking error of the dissolved oxygen concentration as compared to the standard controller application.
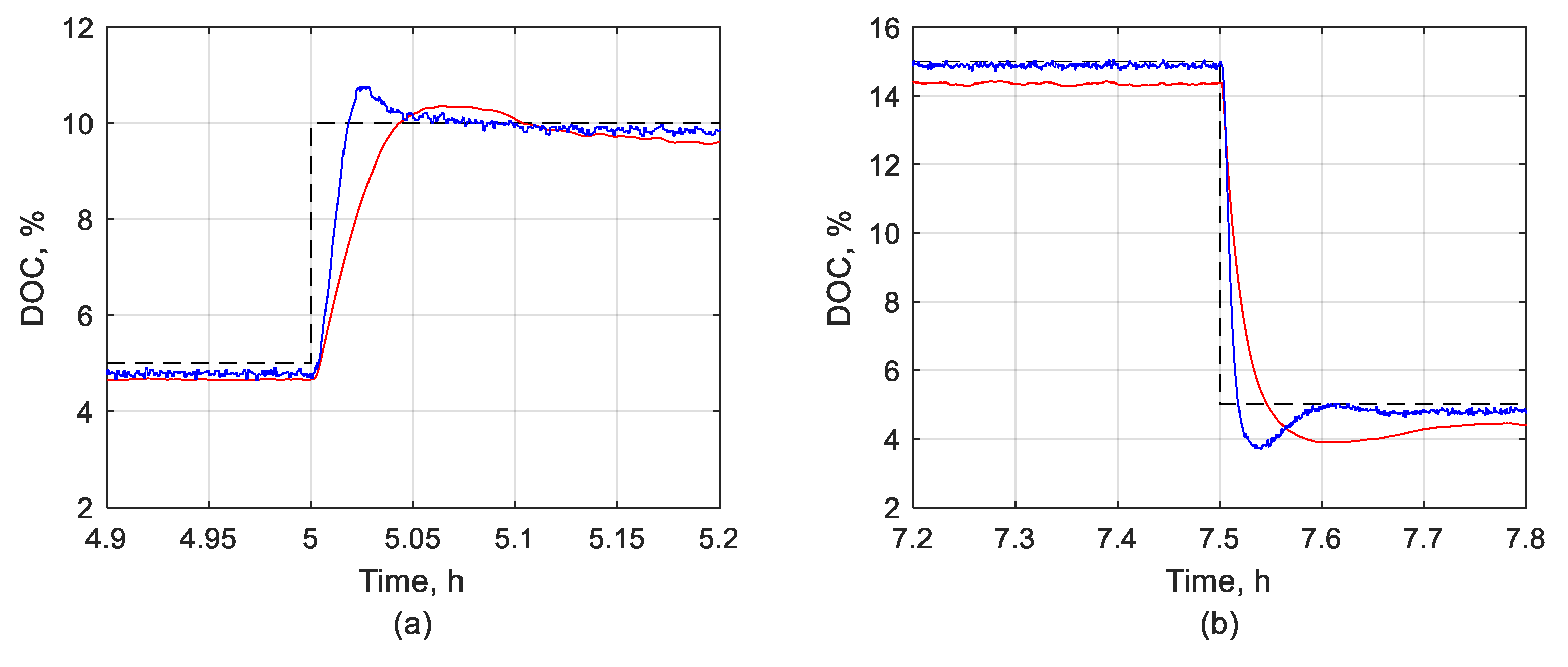
Performance of the gain-scheduled controller for step changes of the set-point at 5 and 7.5 process hours is presented in Figure 4. The investigated adaptive control algorithm yields in lower tracking error and shorter rise time.
3.1.2. DOC Disturbance Rejection Performance
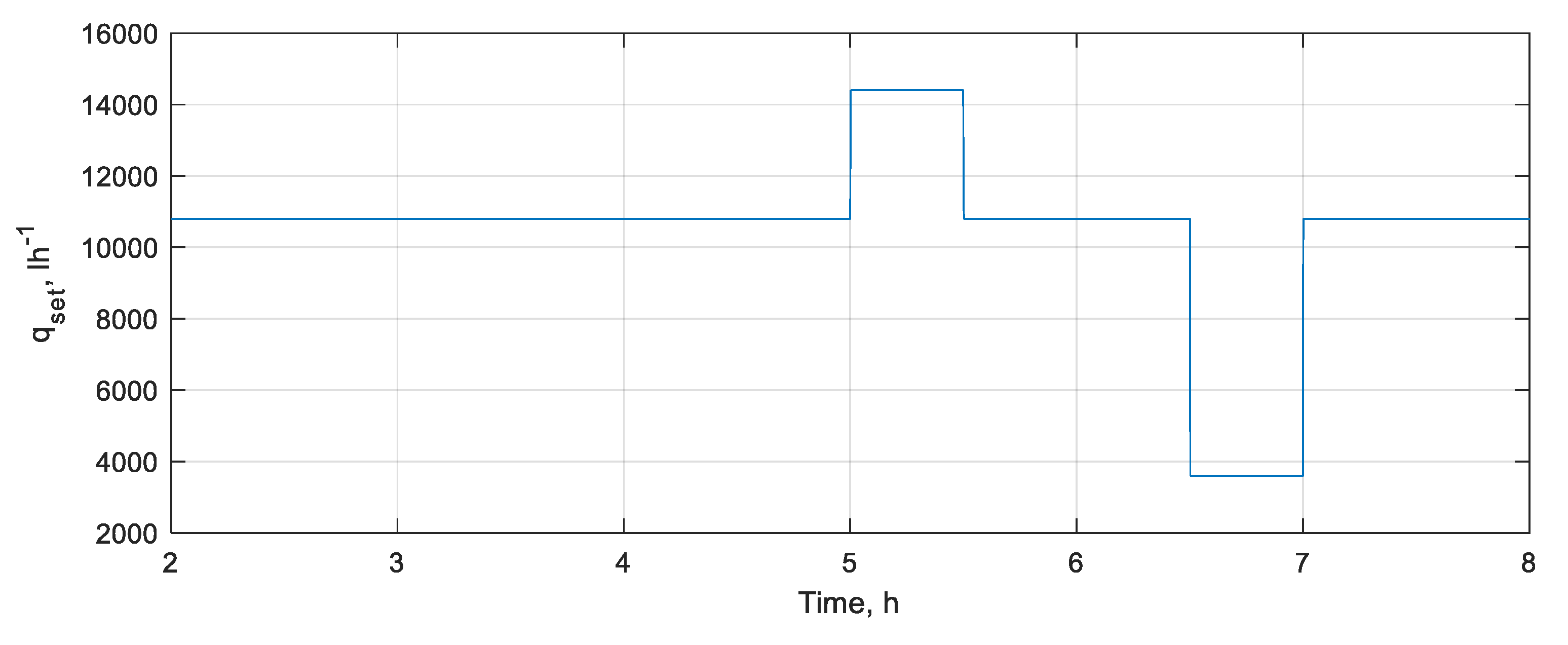
To evaluate the performance of disturbance rejection, the system was simulated at a constant set-point of 10%. Air supply rate change was selected to simulate the disturbance. The change of the air supply rate is depicted in Figure 5.
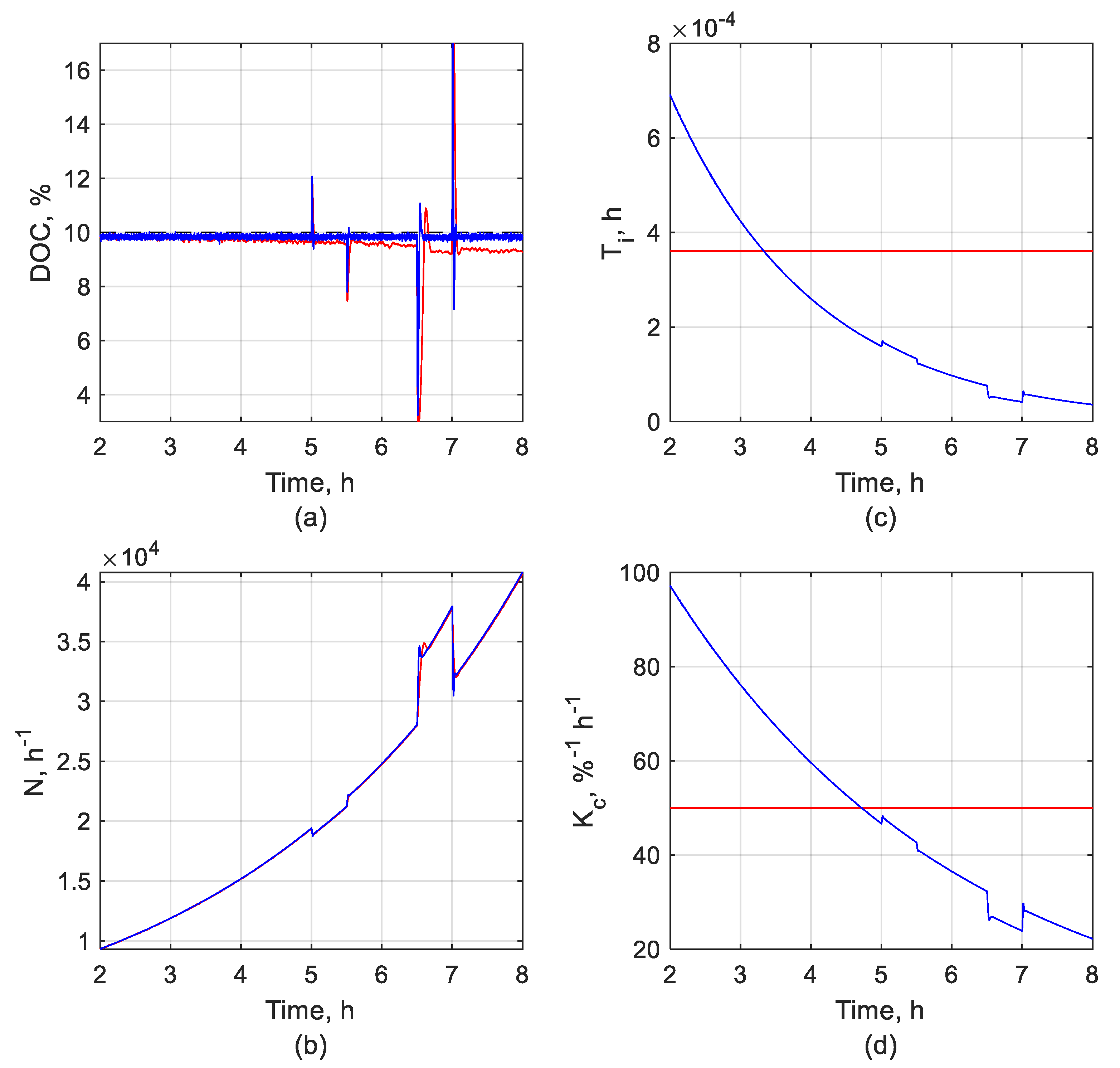
The system response and control performance are depicted in Figure 6a. The trajectory of the manipulated stirring speed N is presented in Figure 6b. Figure 6c,d highlight the adaptation of the controller tuning parameters during the simulation run.
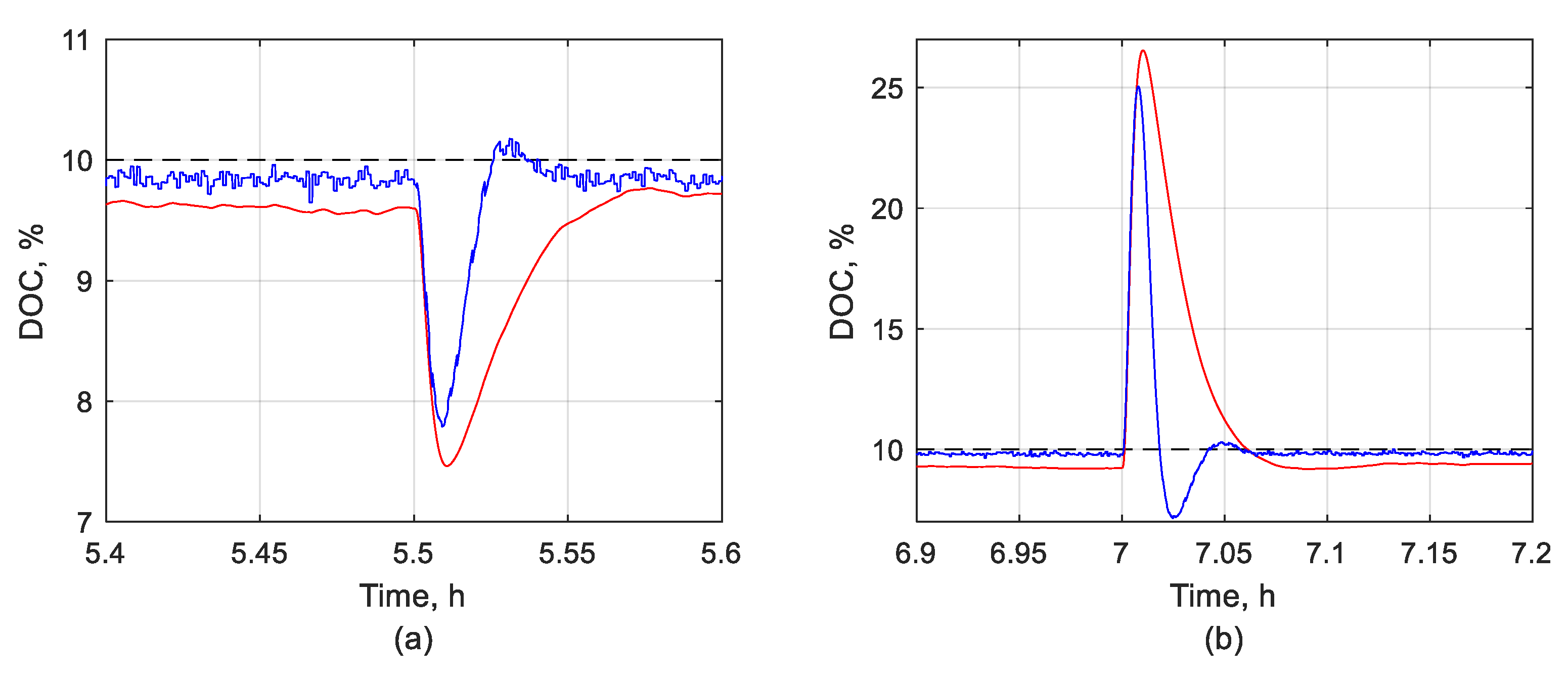
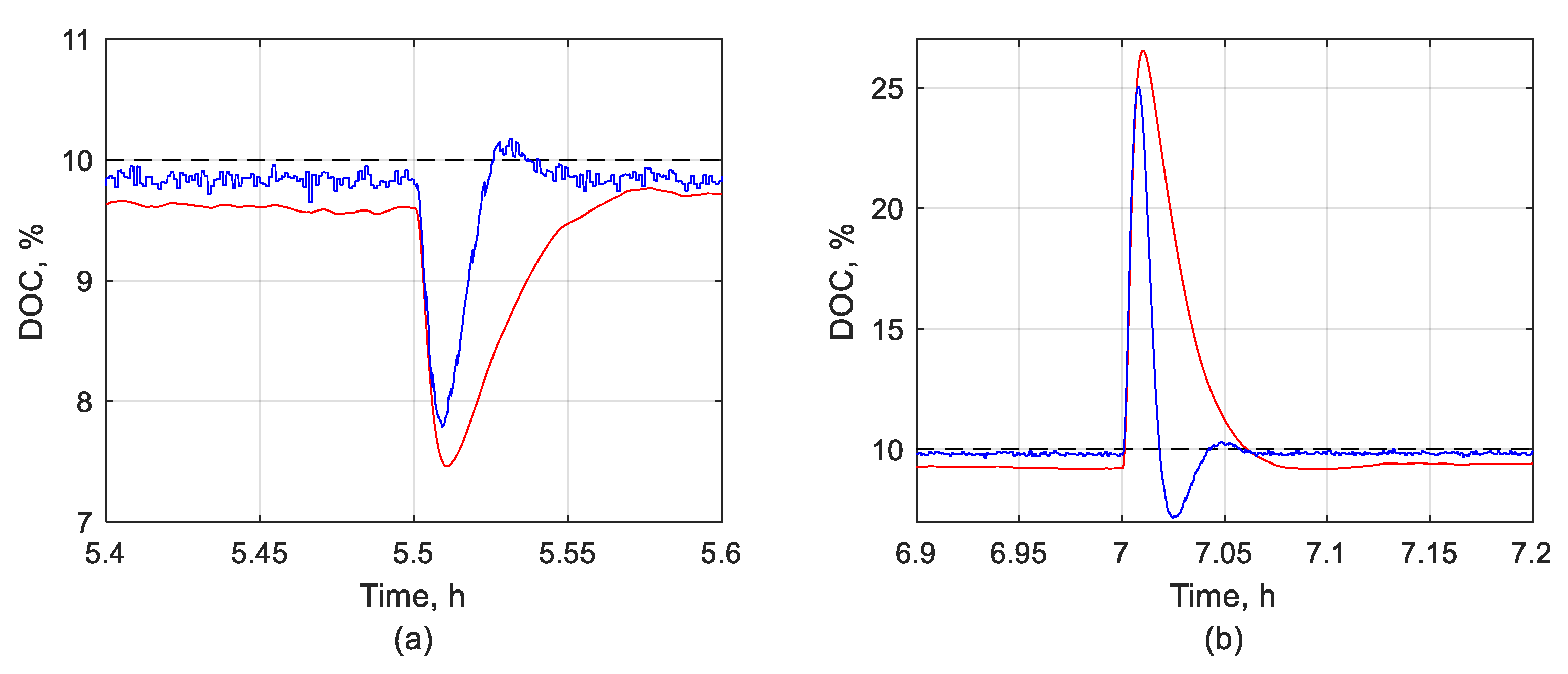
Performance of the gain-scheduled controller for disturbance compensation (the air supply rate step change from 10,800 lh−1 to 14,400 lh−1 occurred at t = 5.5 h, and from 14,400 to 3600 lh−1 occurred at t = 7 h) is presented in Figure 7. The adaptive control system yields lower tracking error, as well reduces the overshoot.
Simulation results show that the gain scheduled PI controller ensures good control quality of DOC under extreme operating conditions and evidently outperforms the conventional PI controller. The integration time constant Ti and the controller gain Kc changed in a wide range, therefore reflecting the significantly varying dynamics of the process. Analysis of the simulation results shows that the adaptive system has reduced the mean absolute error more than 2 times for the investigated control schemes. The rise time of the transient processes caused by the set-point change was approx. 2 times shorter for the adaptive system (see Figure 4a,b). However, both investigated systems yielded similar rise times in case of disturbance rejection (see Figure 7a,b). The control performance of the investigated systems is summarized in Table 4. The adaptive control algorithm outperforms the standard system approx. 2 times in terms of mean absolute error.
4. Conclusions
In this paper, a simple adaptive control system for the set-point control and disturbance rejection of dissolved oxygen concentration is proposed, in which gain scheduling of PID (PI) controller is based on the controller input/output signals only and, therefore, does not require online measurements of process variables for development of gain scheduling algorithms. Realization of the proposed system does not depend on the instrumentation level of the bioreactor and is attractive for practical application.
The controller input/output-based gain scheduling algorithms were developed for set-point tracking and disturbance rejection during DOC control for bioreactor operating both in batch and fed-batch mode. Performance of the gain-scheduled PI controller under extreme operating conditions was investigated by computer simulation. The results demonstrate obvious advantage of the proposed control system compared to conventional PI control systems.
In future work, the authors are planning to perform further experimental investigation by testing the system under real conditions.
Author Contributions
Conceptualization, M.B., D.L. and V.G.; methodology, M.B., D.L. and V.G.; software, M.B. and V.G.; writing—original draft preparation, M.B.; writing—review and editing, V.G.; supervision, V.G.; project administration, V.G.; funding acquisition, M.B., D.L. and V.G. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the European Regional Development Fund according to the supported activity “Research Projects Implemented by World-class Researcher Groups” under Measure No. 01.2.2-LMT-K-718.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interests.
References
- Boudreau, M.A.; McMillan, G.K. New Directions in Bioprocess Modelling and Control: Maximizing Process Analytical Technology Benefits; ISA: Durham, NC, USA, 2007. [Google Scholar]
- Dochain, D. Bioprocess Control; ISTE: London, UK, 2008. [Google Scholar]
- Singh, P.K.; Bhanot, S.; Mohanta, H.K.; Bansal, V. Design and implementation of adaptive fuzzy knowledge based control of pH for strong acid-strong base neutralization process. J. Engl. Res. 2020, 8. [Google Scholar]
- US Food and Drug Administration: Guidance for Industry PAT—A Framework for Innovative Pharma-Ceutical Development, Manufacturing and Quality Assurance. 2004. Available online: https://www.fda.gov/regulatory-information/search-fda-guidance-documents/pat-framework-innovative-pharmaceutical-development-manufacturing-and-quality-assurance (accessed on 27 May 2021).
- Simutis, R.; Lübbert, A. Bioreactor control improves bioprocess performance. Biotechnol. J. 2015, 10, 1115–1130. [Google Scholar] [CrossRef]
- Butkus, M.; Repšytė, J.; Galvanauskas, V. Fuzzy logic-based adaptive control of specific growth rate in fed-batch biotechnological processes: A simulation study. Appl. Scien. 2020, 10, 6818. [Google Scholar] [CrossRef]
- Levišauskas, D. An algorithm for adaptive control of dissolved oxygen concentration in batch culture. Biotechnol. Tech. 1995, 9, 85–90. [Google Scholar] [CrossRef]
- Levišauskas, D.; Simutis, R.; Galvanauskas, V. Adaptive set-point control system for microbial cultivation processes. Non. An. Mod. Cont. 2016, 21, 153–165. [Google Scholar] [CrossRef] [Green Version]
- Babuška, R.; Damen, M.R.; Hellinga, C.; Maarleveld, H. Intelligent adaptive control of bioreactors. J. Intell. Manuf. 2003, 14, 255–265. [Google Scholar] [CrossRef]
- Mészáros, A.; Andrášik, A.; Mizsey, P.; Fonyo, Z.; Illeová, V. Computer control of pH and DO in a laboratory fermenter using a neural network technique. Bioprocess. Biosyst. Eng. 2004, 26, 331–340. [Google Scholar] [CrossRef]
- Du, X.; Wang, J.; Jegatheesan, V.; Shi, G. Dissolved oxygen control in activated sludge process using a neural network-based adaptive PID algorithm. Appl. Scien. 2018, 8, 261. [Google Scholar] [CrossRef] [Green Version]
- Palancar, M.C.; Aragón, J.M.; Miguéns, A.J.A.; Torrecilla, J.S. Application of a model reference adaptive control system to pH control. effects of lag and delay time. Ind. Eng. Chem. 1996, 35, 4100–4110. [Google Scholar] [CrossRef]
- Cardello, R.J.; San, K.-Y. The design of controllers for batch bioreactors. Biotechnol. Bioeng. 1988, 32, 519–526. [Google Scholar] [CrossRef]
- Kuprijanov, A.; Gnoth, S.; Simutis, R.; Lübbert, A. Advanced control of dissolved oxygen concentration in fed batch cultures during recombinant protein production. Appl. Microbiol. Biotechnol. 2009, 82, 221–229. [Google Scholar] [CrossRef]
- Gnoth, S.; Kuprijanov, A.; Simutis, R.; Lübbert, A. Simple adaptive pH control in bioreactors using gain-scheduling methods. Appl. Microbiol. Biotechnol. 2010, 85, 955–964. [Google Scholar] [CrossRef] [PubMed]
- Hwang, Y.B.; Lee, S.C.; Chang, H.N.; Chang, Y.K. Dissolved oxygen concentration regulation using auto-tuning proportional-integral-derivative controller in fermentation process. Biotechnol. Tech. 1991, 5, 85–90. [Google Scholar] [CrossRef]
- Levisauskas, D.; Simutis, R.; Galvanauskas, V.; Urniezius, R. Simple control systems for set-point control of dissolved oxygen concentration in batch fermentation processes. Chem. Eng. Trans. 2019, 74, 127–132. [Google Scholar]
- Smets, I.Y.; Claes, J.; November, E.J.; Bastin, G.P.; Van Impe, J.F. Optimal adaptive control of (bio) chemical reactors: Past, present and future. J. Process. Control. 2004, 14, 795–805. [Google Scholar] [CrossRef]
- Bastin, G.; Impe, J.F. Nonlinear and adaptive control in biotechnology: A tutorial. Eur. J. Control 1995, 1, 37–53. [Google Scholar] [CrossRef]
- Butkus, M.; Simutis, R.; Galvanauskas, V. Unified structure of adaptive system for control of basic process variables in biotechnological cultivation processes: Ph control system case study. Chem. Eng. Trans. 2021, 86, 985–990. [Google Scholar]
- Galvanauskas, V.; Simutis, R.; Vaitkus, V. Adaptive control of biomass specific growth rate in fed-batch biotechnological processes. A comparative study. Process 2019, 7, 810. [Google Scholar] [CrossRef] [Green Version]
- Brignoli, Y.; Freeland, B.; Cunningham, D.; Dabros, M. Control of specific growth rate in fed-batch bioprocesses: Novel controller design for improved noise management. Process 2020, 8, 679. [Google Scholar] [CrossRef]
- Levine, W.S. (Ed.) The Control. Handbook; IEEE/CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Villadsen, J.; Nielsen, J.; Liden, G. Bioreaction Engineering Principles; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Levisauskas, D.; Galvanauskas, V.; Henrich, S.; Wilhelm, K.; Volk, N.; Lübbert, A. Model-based optimization of viral capsid protein production in fed-batch culture of recombinant Escherichia coli. Bioproc. Biosyst. Eng. 2003, 25, 255–262. [Google Scholar] [CrossRef]
- Luedeking, R.; Piret, E.L. A kinetic study of the lactic acid fermentation. Batch process at controlled pH. Biotechnol. Bioeng. 2000, 67, 636–644. [Google Scholar] [CrossRef]
Figure 1.
Block diagram of the dissolved oxygen concentration (DOC) control system.
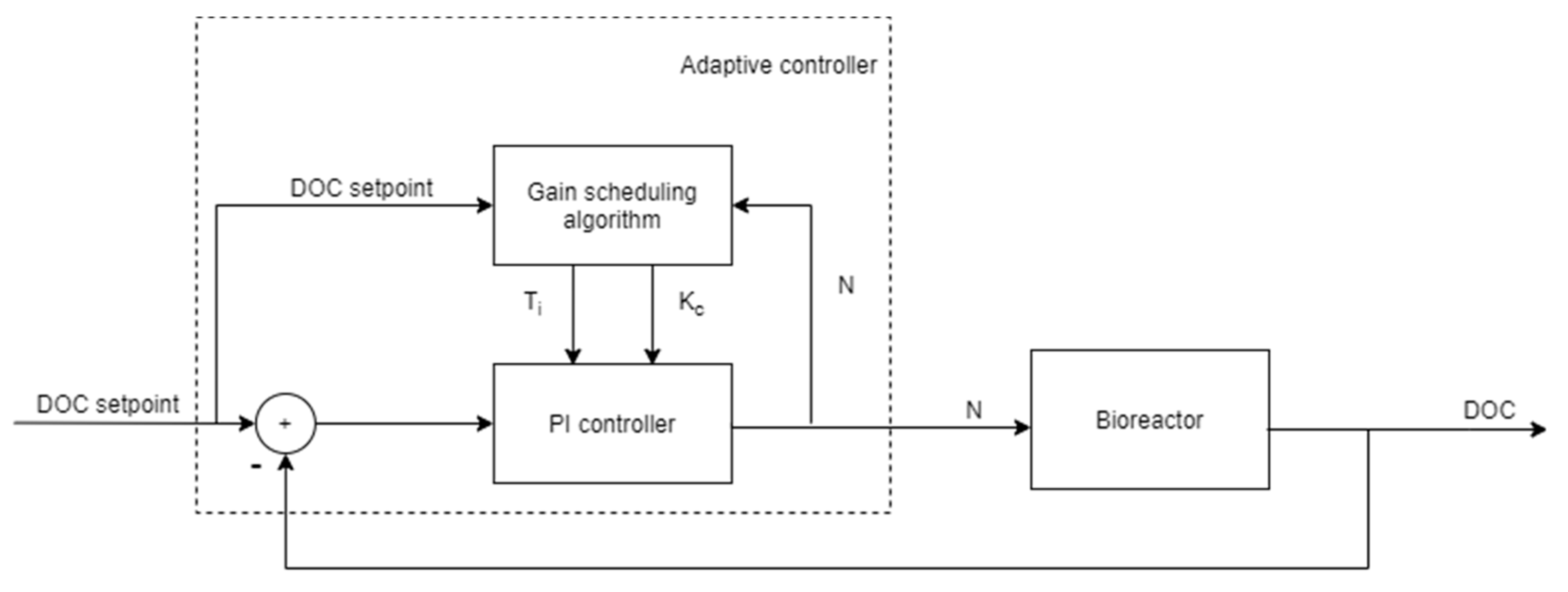
Figure 2.
Trajectories of x (a), s (b), V (c), Fs (d), µ (e), and oxygen uptake rate (OUR) (f) during a DOC set-point tracking simulation run.
Figure 2.
Trajectories of x (a), s (b), V (c), Fs (d), µ (e), and oxygen uptake rate (OUR) (f) during a DOC set-point tracking simulation run.

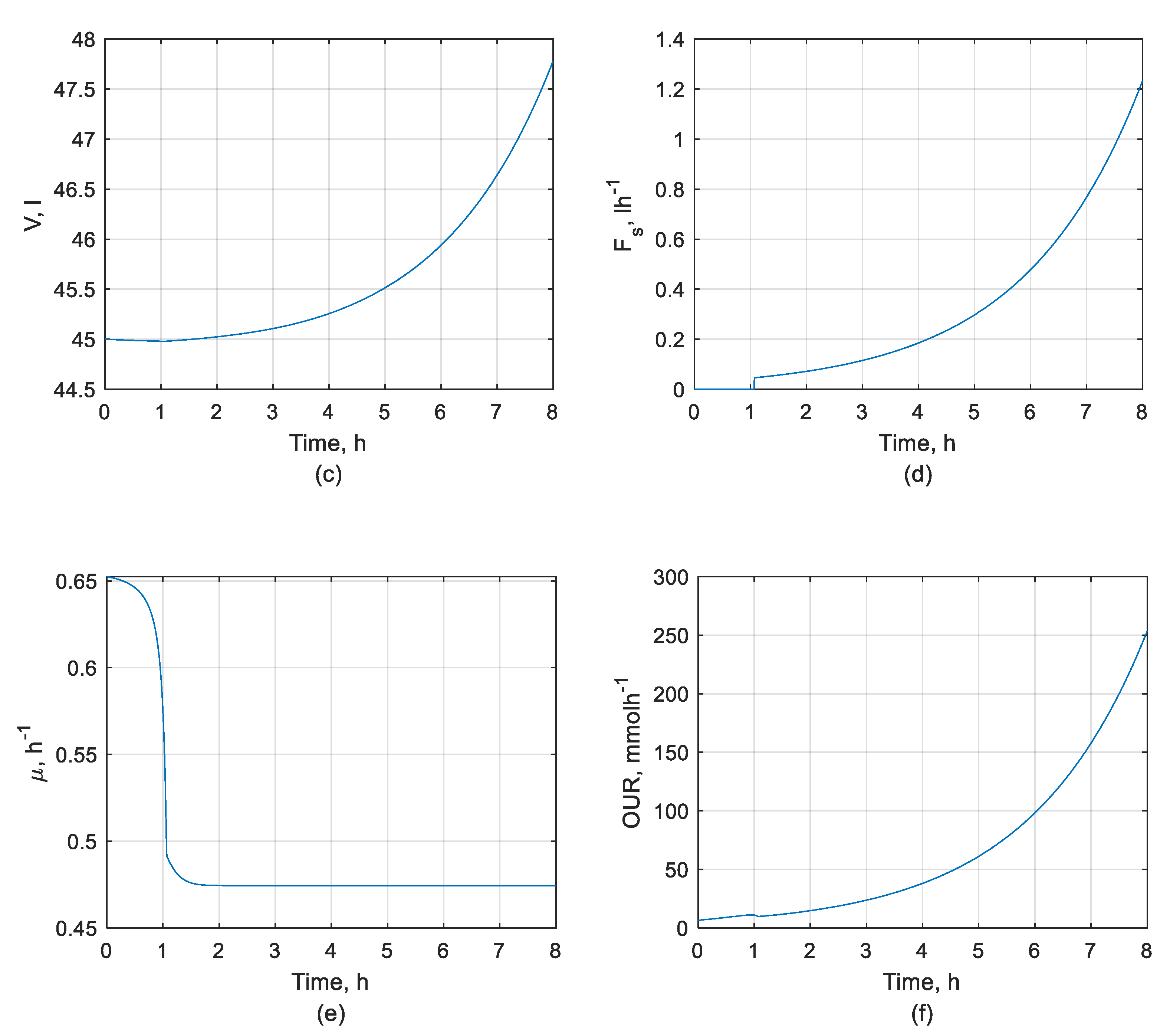
Figure 3.
Trajectories of DOC (a), controller tuning parameter Ti (b), stirring speed N (c), and controller tuning parameter Kc (d). Set-point change: PI controller with fixed parameters (red), adaptive PI controller with Gain Scheduling (blue); DOC set-point (black).
Figure 3.
Trajectories of DOC (a), controller tuning parameter Ti (b), stirring speed N (c), and controller tuning parameter Kc (d). Set-point change: PI controller with fixed parameters (red), adaptive PI controller with Gain Scheduling (blue); DOC set-point (black).
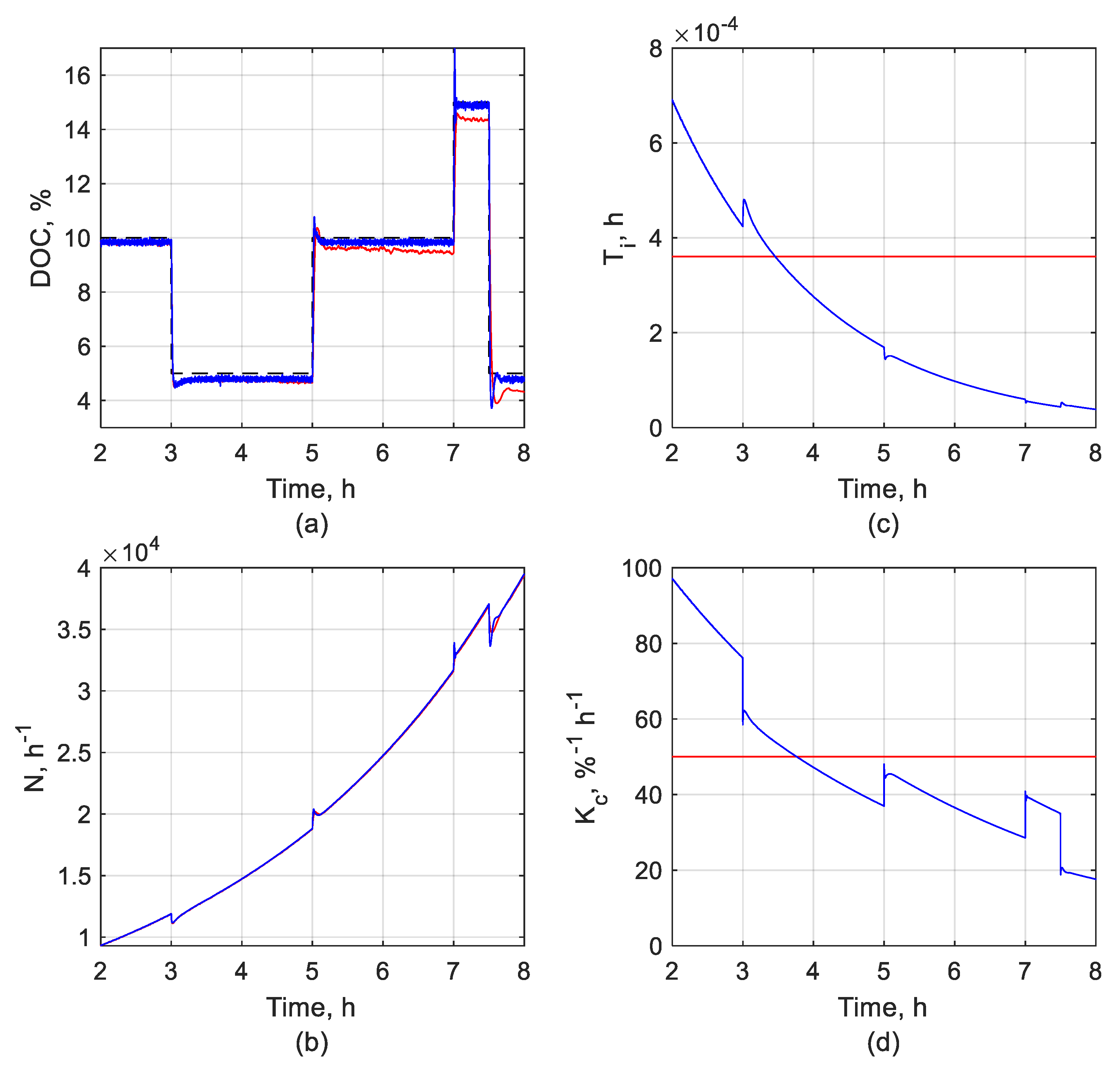
Figure 4.
DOC responses (a) and (b) to set-point change: PI controller with fixed parameters (red), adaptive PI controller with Gain Scheduling (blue), DOC set-point (black).
Figure 4.
DOC responses (a) and (b) to set-point change: PI controller with fixed parameters (red), adaptive PI controller with Gain Scheduling (blue), DOC set-point (black).

Figure 5.
Air supply rate change during the simulation.
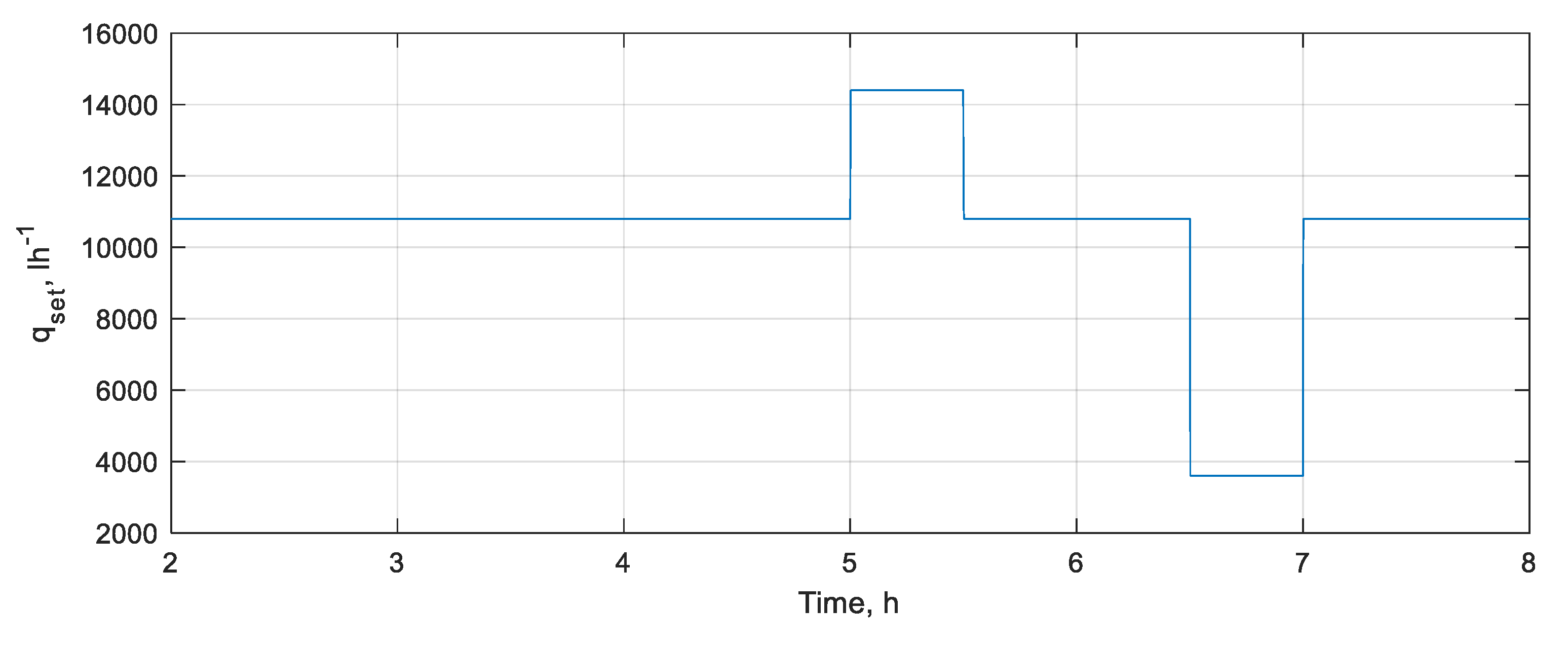
Figure 6.
Trajectories of DOC (a), controller tuning parameter Ti (b), stirring speed N (c), and controller tuning parameter Kc (d). Disturbance rejection when using: PI controller with fixed parameters (red), adaptive PI controller with Gain Scheduling (blue); DOC set-point (black).
Figure 6.
Trajectories of DOC (a), controller tuning parameter Ti (b), stirring speed N (c), and controller tuning parameter Kc (d). Disturbance rejection when using: PI controller with fixed parameters (red), adaptive PI controller with Gain Scheduling (blue); DOC set-point (black).

Figure 7.
DOC disturbance compensation cases (a) and (b): PI controller with fixed parameters (red), adaptive PI controller with Gain Scheduling (blue), DOC set-point (black).
Figure 7.
DOC disturbance compensation cases (a) and (b): PI controller with fixed parameters (red), adaptive PI controller with Gain Scheduling (blue), DOC set-point (black).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
DOC model parameter values and initial conditions of the state variables.
| Model Parameters | ||
|---|---|---|
| H = 0.7906 L mmol−1 | ε = 0.15 | Tel1 = 10 s |
| Tel2 = 2 s | Tq = 2 s | Tu = 1 s |
| α = 0.8·10−7 | β = 2 | γ = 0.2 |
| vmol = 0.0224 l mmol−1 | ||
| Initial Conditions | ||
| cel(0) = 10% | q(0) = 2 s−1 | u(0) = 2.5 s−1 |
| ca(0) = 0.0266 mmol L−1 | yO2(0) = 0.2099 | ael (0) = 10% |
Table 2.
Biotechnological model parameter values and initial values of the state variables.
| Model Parameters | ||
|---|---|---|
| Y = 0.8646 gg−1 | m = 0.018 gg−1 h−1 | Yxs = 0.52 gg−1 |
| µmax = 0.737 1 h−1 | Ki = 93.8 gl−1 | S0 = 450 gl−1 |
| Ks = 0.02 gl−1 | kc = 0.00265 mmol L−1 | Fsmp = 0.025 lh−1 |
| Initial Conditions | ||
| V(0) = 45 L | x(0) = 0.25 gl−1 | s(0) = 0.5 gl−1 |
Table 3.
Fixed PI controller parameters for standard control.
| Fixed Parameter Values | ||
|---|---|---|
| Kc | Ti | |
| DOC control | 50%−1 h−1 | 3.6 × 10−4 h |
Table 4.
Tuning parameters and MAE values for the investigated DOC control systems.
| Control Type | Tuning Parameters | Mean Absolute Error | |
|---|---|---|---|
| Disturbance Rejection | Set-Point Tracking | ||
| Standard DOC | Kc = 50%−1 h−1, Ti = 3.6 × 10−4 h | 0.166 | 0.071 |
| Adaptive DOC | KTi = 0.6 × 105, KKc = 1.5 × 105 | 0.063 | 0.028 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Butkus, M.; Levišauskas, D.; Galvanauskas, V. Simple Gain-Scheduled Control System for Dissolved Oxygen Control in Bioreactors. Processes 2021, 9, 1493. https://0-doi-org.brum.beds.ac.uk/10.3390/pr9091493
AMA Style
Butkus M, Levišauskas D, Galvanauskas V. Simple Gain-Scheduled Control System for Dissolved Oxygen Control in Bioreactors. Processes. 2021; 9(9):1493. https://0-doi-org.brum.beds.ac.uk/10.3390/pr9091493
Chicago/Turabian StyleButkus, Mantas, Donatas Levišauskas, and Vytautas Galvanauskas. 2021. "Simple Gain-Scheduled Control System for Dissolved Oxygen Control in Bioreactors" Processes 9, no. 9: 1493. https://0-doi-org.brum.beds.ac.uk/10.3390/pr9091493
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.