Topic Editors



Multi-Sensor Integrated Navigation Systems
Topic Information
Dear Colleagues,
Multi-sensor integrated navigation systems have become a hot area of research and have made significant progress in both theoretical investigation and practical applications. Various intelligent and advanced multi-sensor fusion and data analysis algorithms and technologies have been applied in many fields, such as sensor networks, automation, monitoring, micro/nano systems, operation, control, field robotics, navigation and autonomous vehicles. In all these applications, the key enabling technologies focus on localization and navigation.
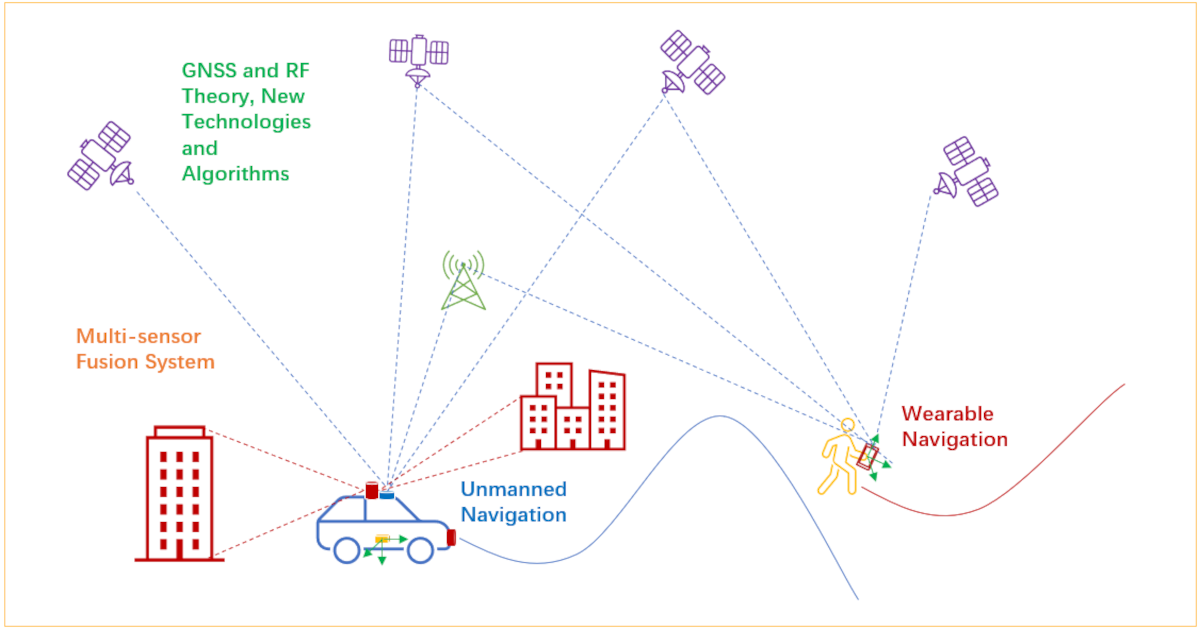
Many recent studies have been focused on the integration of GNSS systems with a variety of underlying sensor technologies, such as MEMS IMU, RF (Radio Frequency), cameras, ultrasonic sensors, laser scanners, magnetometers, and barometers. The fusion scheme can use all data from these sensors and overcome their limitations, which provides a reliable and precise navigation. The multi-dimensional capabilities of the recent mobile computing of inexpensive devices (including smartphones, tablets, and wearables) has shown the way for new personalized services, such as indoor localization, which nowadays represents a major scientific and technological challenge.
Multi-sensor integrated navigation systms have become key to add location and motion context to data in various areas, from robots and self-driving cars to smartphones and internet-of-things (IoT) devices. In recent years, technological advancements have facilitated the manufacturing of compact, inexpensive, and low-power navigation and sensing (e.g., inertial navigation, computer vision, LiDAR, wireless, magnetic, light, and sound) sensors for smart devices. These advances have led to the fast development of navigation sensors, data processing, and related services. Multi-sensor integrated navigation is a mainstream direction to design an accurate, low-cost, low-power, reliable, and scalable navigation system for cutting-edge applications. Extensive research efforts have been paid to multi-sensor integrated navigation algorithms, architectures, and systems.
This Topic is devoted to new advances and research results on multi-sensor fusion and data analysis to attract widespread attention to the many research fields that apply various positioning methods in indoor and outdoor environments. The applications of various multi-sensor fusion technologies and of various systems are also welcome. This Topic will also consider articles introducing novel ideas and algorithms and the latest advances in the field of multi-sensor data fusion coupled with any prototype implementations and evaluations.
This Topic include, but are not limited to:
GNSS and RF Theory, New Technologies and Algorithms
- GNSS/IMU conbimed system for Aeronautical and Astronautical Engineering;
- GNSS theories and applications for Sea and Ocean;
- GNSS Continuously Operating Reference Stations (CORS);
- New GNSS Ionospheric and Tropospheric technologies and algorithms;
- GNSS Metereology;
- New GNSS technologies for monitering wind power generation system, wild life, etc.;
- High precision mobile phone positioning based on GNSS, IMU, and other sensors;
- WiFi, IMU, LiDAR, and camera sensors for pedestrian navigation;
- Bluetooth Angle of Arrival (AOA) for positioning and navigation;
- UWB-based locating systems;
- GNSS, IMU, and camera sensors for live entertainment, 3D tourism devices, etc.;
- GNSS for Transportation, Agriculture, Forestry, Fishery, Mining and other projects;
- Precise Point Positioning (PPP): new technologies and algorithms.
Multi-sensor Fusion System
- Multi-sensor fusion for precise navigation;
- Sensor signal processing and data analysis;
- Applications of machine learning;
- Optimal sensor placement;
- Multi-sensor fusion for 3D localization;
- Intelligent multi-sensor fusion for indoor navigation;
- Multi-sensor-based monitoring and operation, and simultaneous localization and mapping (SLAM);
- Multi-sensor-based control system for machine, vehicles, etc.;
- Localization and Internet of Things;
- Modelling and analysis of multi-sensors;
- Software and hardware development for multi-sensor fusion;
- Algorithms to combine sensors for pedestrian navigation or localization;
- Automatic indoor mapping for navigation and tracking systems and smartphone multi-sensor fusion.
Wearable Navigation and Unmanned Navigation
- New wearable navigation and sensing sensors and applications;
- Algorithms and systems for smart wearable positioning;
- Data-driven wearable navigation;
- Interaction between smart wearables and robots;
- Combination of wearable navigation and autonomous driving;
- Application of smart wearable motion sensing in medical health;
- The use of smart wearable navigation in public safety;
- Smart wearable AR and VR;
- Geoinformation systems on data from wearable devices;
- Unmanned Aerial Vehicle (UAV) with multi-sensors.
Prof. Dr. Hang Guo
Dr. Marcin Uradzinski
Prof. Dr. You Li
Topic Editors
Keywords
- GNSS
- Continuously Operating Reference Stations (CORS)
- Precise Point Positioning
- GNSS/MEMS IMU integration
- internet-of-things
- WiFi localization
- bluetooth angle of arrival
- SLAM
- LiDAR
- indoor positioning
- unmanned aerial vehicle
- applications of multi-sensor fusion
- mobile phone positioning
- wearable positioning
- unmanned navigation
Participating Journals
| Journal Name | Impact Factor | CiteScore | Launched Year | First Decision (median) | APC | |
|---|---|---|---|---|---|---|
|
Aerospace
|
2.6 | 3.0 | 2014 | 22.3 Days | CHF 2400 | Submit |
|
Applied Sciences
|
2.7 | 4.5 | 2011 | 16.9 Days | CHF 2400 | Submit |
|
Remote Sensing
|
5.0 | 7.9 | 2009 | 23 Days | CHF 2700 | Submit |
|
Sensors
|
3.9 | 6.8 | 2001 | 17 Days | CHF 2600 | Submit |
|
Smart Cities
|
6.4 | 8.5 | 2018 | 20.2 Days | CHF 2000 | Submit |
![]()
MDPI Topics is cooperating with Preprints.org and has built a direct connection between MDPI journals and Preprints.org. Authors are encouraged to enjoy the benefits by posting a preprint at Preprints.org prior to publication:
- Immediately share your ideas ahead of publication and establish your research priority;
- Protect your idea from being stolen with this time-stamped preprint article;
- Enhance the exposure and impact of your research;
- Receive feedback from your peers in advance;
- Have it indexed in Web of Science (Preprint Citation Index), Google Scholar, Crossref, SHARE, PrePubMed, Scilit and Europe PMC.